一种基于图像识别的薯类挖掘装置
本发明涉及农业装置,特别是涉及一种基于图像识别的薯类挖掘装置。
背景技术:
1、薯类作物是全球重要的粮食作物,同时也是粮、菜、饲、加工兼用型作物,随着我国对薯类主粮化的推进,种植生产机械化也在不断地推广。在薯类生产环节中,最为关键的是收获环节,收获环节直接决定了薯类的品质及生产成本,在收获过程中,挖掘性能直接影响着收获作业的质量。
2、挖掘是收获的关键部分,现有薯类收获机具主要为平铲挖掘,在湿度大的粘性土壤挖掘过程中存在挖掘壅土,壅土为土聚集起来妨碍耕作的现象,多由草根或作物根茬阻挡﹑耙齿过密﹑土壤较湿等原因引起。壅土会导致挖掘阻力大,扰乱薯类果实与土壤、机具间的耦合作用,导致薯类受到土壤的挤压或受到挖掘铲的碰撞而受损,降低收获品质。
3、在挖掘收获整个过程中,现有技术中机具无法对壅土现象进行实时监控并及时处理,只能在人工发现壅土后停车进行人工清理,同时针对挖掘过程中存在的壅土现象,现有技术张红提出了仿生挖掘,但仅能解决部分土壤的挖掘过程中挖掘铲粘土情况,并不能解决壅土状况,且一旦产生挖掘壅土现象仿生挖掘铲并不能解决问题。部分技术采用振动挖掘的方案,虽然会减少挖掘阻力、减少挖掘壅土情况的发生,但其抖动频率固定,无法监测壅土情况,针对不同壅土情况无法实现不同频率的抖动。
4、因此,亟需一种基于图像识别的薯类挖掘装置,用来解决上述问题。
技术实现思路
1、本发明的目的是提供一种基于图像识别的薯类挖掘装置,以解决上述现有技术存在的问题。
2、为实现上述目的,本发明提供了如下方案:本发明提供一种基于图像识别的薯类挖掘装置,包括:
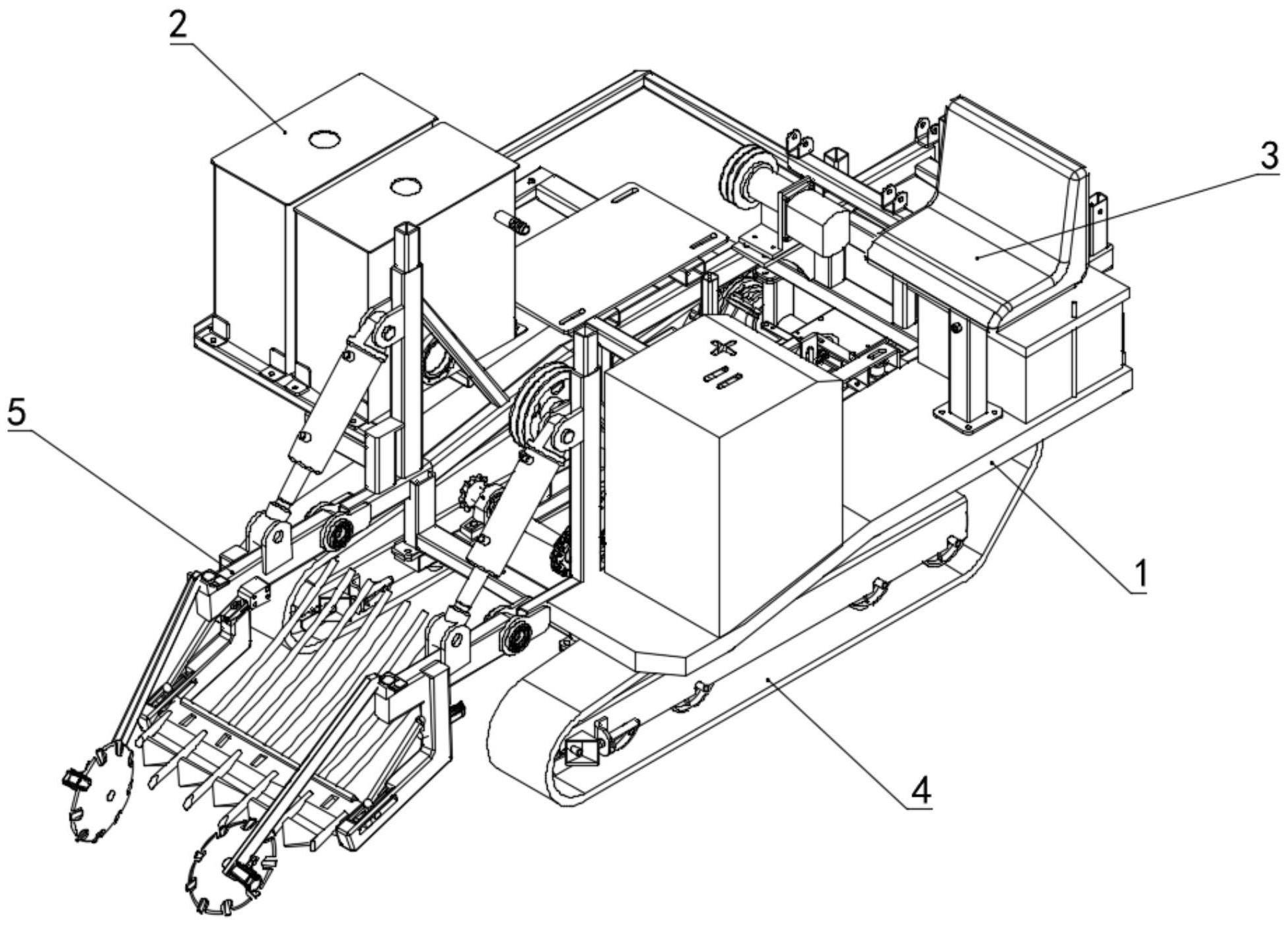
3、整机本体,所述整机本体包括机体,所述机体顶端设置有控制装置和驾驶控制台,所述机体底端安装有行进装置,所述机体前端安装两有机架;
4、振动挖掘组件,所述振动挖掘组件包括挖掘件和振动件,所述挖掘件和所述振动件分别设置在所述机架上,所述挖掘件通过所述振动件对薯类进行振动挖掘,所述振动件与所述控制装置电性连接;
5、清杂破土组件,所述清杂破土组件包括两清杂破土件,所述机架顶端两侧均安装有支撑板的一端,两所述清杂破土件分别设置在两所述支撑板另一端相对的一侧,两所述清杂破土组件分别与所述控制装置电性连接;
6、机器视觉组件,所述机器视觉组件安装在所述机架上且与所述控制装置电性连接。
7、优选的,所述挖掘件包括挖掘铲,所述机架两侧均开设有导向槽,两所述导向槽平行设置,所述挖掘铲位于两所述导向槽之间,且所述挖掘铲两端均伸入到两所述导向槽内且通过所述振动件与所述导向槽滑动连接,所述挖掘铲前端与地面对应设置,所述挖掘铲后端沿轴向等间距固定连接有若干导向杆。
8、优选的,所述振动件包括固定连接在所述机架两侧的两第一控制电机,所述第一控制电机的输出轴贯穿所述机架固定连接有控制电机连接套,所述控制电机连接套上铰接有连接杆的一端,所述导向槽顶端开设有长孔,所述连接杆另一端铰接有挖掘铲连接套,所述挖掘铲连接套伸入到所述长孔内与所述挖掘铲两侧顶端固定连接,所述第一控制电机与所述控制装置电性连接。
9、优选的,所述清杂破土件包括转动连接在所述支撑板上的清杂破土盘,所述清杂破土盘外侧壁上沿周向等间距设置有若干锯齿形清杂破土刀和若干切割刀,若干所述干锯齿形清杂破土刀和若干所述切割刀交错设置,所述支撑板远离所述清杂破土盘的一侧固定连接有第二控制电机,所述第二控制电机的输出轴贯穿所述支撑板与所述第二控制电机同轴固定连接,所述机架两侧均固定连接有控制器,两所述第二控制电机分别与两所述控制器电性连接,所述控制器与所述控制装置电性连接。
10、优选的,所述机器视觉组件包括固定连接在所述机架顶端两侧的两工业相机,所述工业相机与所述控制装置电性连接。
11、优选的,所述挖掘铲包括主体,所述主体两端伸入到所述导向槽内,所述主体前端沿轴向等间距固定连接有若干破土辊和若干挖掘铲头,若干所述破土辊和若干所述挖掘铲头交错设置,所述挖掘铲头与所述主体之间开设有第一漏土槽,所述主体上沿轴向开设有若干第二漏土槽,若干所述第二漏土槽与若干所述挖掘铲头一一对应。
12、优选的,所述清杂破土盘为中间凸起的弧形面结构,两所述清杂破土盘上的两所述弧形面结构对应设置。
13、优选的,所述切割刀的长度小于所述锯齿形清杂破土刀的长度。
14、优选的,所述支撑板靠近所述机架的一端固定连接有十字调节板,所述十字调节板上设置有螺栓,所述十字调节板通过所述螺栓与所述机架限位连接。
15、优选的,所述挖掘铲与地面之间的夹角为17°-18°。
16、与现有技术相比,本发明具有如下优点和技术效果:
17、本发明提供的一种基于图像识别的薯类挖掘装置,通过对挖掘处周围的土壤进行图像处理和分析,来检测挖掘过程中存在的挖掘壅土现象并及时反馈,从而准确地掌握装置的运行状态,从而对振动频率、清杂破土速度进行调节,以便将挖掘铲处的壅土尽快清除,减少挖掘阻力、降低机具功耗、提高薯类收获质量。本申请通过机器视觉技术来检测挖掘过程中存在的挖掘壅土现象,减少挖掘阻力、降低机具功耗、提高薯类收获质量。
技术特征:
1.一种基于图像识别的薯类挖掘装置,其特征在于,包括:
2.根据权利要求1所述的一种基于图像识别的薯类挖掘装置,其特征在于:所述挖掘件包括挖掘铲(7),所述机架(5)两侧均开设有导向槽(8),两所述导向槽(8)平行设置,所述挖掘铲(7)位于两所述导向槽(8)之间,且所述挖掘铲(7)两端均伸入到两所述导向槽(8)内且通过所述振动件与所述导向槽(8)滑动连接,所述挖掘铲(7)前端与地面对应设置,所述挖掘铲(7)后端沿轴向等间距固定连接有若干导向杆(20)。
3.根据权利要求2所述的一种基于图像识别的薯类挖掘装置,其特征在于:所述振动件包括固定连接在所述机架(5)两侧的两第一控制电机(9),所述第一控制电机(9)的输出轴贯穿所述机架(5)固定连接有控制电机连接套(10),所述控制电机连接套(10)上铰接有连接杆(11)的一端,所述导向槽(8)顶端开设有长孔,所述连接杆(11)另一端铰接有挖掘铲连接套(12),所述挖掘铲连接套(12)伸入到所述长孔内与所述挖掘铲(7)两侧顶端固定连接,所述第一控制电机(9)与所述控制装置(2)电性连接。
4.根据权利要求3所述的一种基于图像识别的薯类挖掘装置,其特征在于:所述清杂破土件包括转动连接在所述支撑板(6)上的清杂破土盘(13),所述清杂破土盘(13)外侧壁上沿周向等间距设置有若干锯齿形清杂破土刀(14)和若干切割刀(15),若干所述锯齿形清杂破土刀(14)和若干所述切割刀(15)交错设置,所述支撑板(6)远离所述清杂破土盘(13)的一侧固定连接有第二控制电机(16),所述第二控制电机(16)的输出轴贯穿所述支撑板(6)与所述第二控制电机(16)同轴固定连接,所述机架(5)两侧均固定连接有控制器(17),两所述第二控制电机(16)分别与两所述控制器(17)电性连接,所述控制器(17)与所述控制装置(2)电性连接。
5.根据权利要求4所述的一种基于图像识别的薯类挖掘装置,其特征在于:所述机器视觉组件包括固定连接在所述机架(5)顶端两侧的两工业相机(18),所述工业相机(18)与所述控制装置(2)电性连接。
6.根据权利要求2所述的一种基于图像识别的薯类挖掘装置,其特征在于:所述挖掘铲(7)包括主体(71),所述主体(71)两端伸入到所述导向槽(8)内,所述主体(71)前端沿轴向等间距固定连接有若干破土辊(72)和若干挖掘铲头(73),若干所述破土辊(72)和若干所述挖掘铲头(73)交错设置,所述挖掘铲头(73)与所述主体(71)之间开设有第一漏土槽(74),所述主体(71)上沿轴向开设有若干第二漏土槽(75),若干所述第二漏土槽(75)与若干所述挖掘铲头(73)一一对应。
7.根据权利要求4所述的一种基于图像识别的薯类挖掘装置,其特征在于:所述清杂破土盘(13)为中间凸起的弧形面结构,两所述清杂破土盘(13)上的两所述弧形面结构对应设置。
8.根据权利要求4所述的一种基于图像识别的薯类挖掘装置,其特征在于:所述切割刀(15)的长度小于所述锯齿形清杂破土刀(14)的长度。
9.根据权利要求1所述的一种基于图像识别的薯类挖掘装置,其特征在于:所述支撑板(6)靠近所述机架(5)的一端固定连接有十字调节板(19),所述十字调节板(19)上设置有螺栓,所述十字调节板(19)通过所述螺栓与所述机架(5)限位连接。
10.根据权利要求2所述的一种基于图像识别的薯类挖掘装置,其特征在于:所述挖掘铲(7)与地面之间的夹角为17°-18°。
技术总结
本发明公开了一种基于图像识别的薯类挖掘装置,包括整机本体,整机本体包括机体、控制装置、驾驶控制台、行进装置,机体前端安装有两机架;振动挖掘组件,振动挖掘组件包括挖掘件和振动件,挖掘件和振动件分别设置在机架上,挖掘件通过振动件对薯类进行振动挖掘,振动件与控制装置电性连接;清杂破土组件,清杂破土组件包括两清杂破土件,机架顶端两侧均安装有支撑板的一端,两清杂破土件分别设置在两支撑板另一端相对的一侧,两清杂破土组件分别与控制装置电性连接;机器视觉组件,机器视觉组件安装在机架上且与控制装置电性连接。本发明通过机器视觉技术来检测挖掘过程中存在的挖掘壅土现象,减少挖掘阻力、降低机具功耗、提高薯类收获质量。
技术研发人员:潘永菲,杨然兵,许鹏,陈栋泉,张健,杨松梅,青苡任,查显涛,王涛,邢洁洁,孙文斌,徐康,陈路,陈林,何宇鹏,周桂泉
受保护的技术使用者:海南大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!