一种无人协同卸粮转运车及其自主作业系统的制作方法
本发明涉及农机无人化,更具体地说,涉及一种无人协同卸粮转运车及其自主作业系统。
背景技术:
1、近年来,以导航自动驾驶为代表的农机无人化技术显著发展,无人农机在一定程度上降低了人工劳动强度,但综合作业效率提升并不明显,尤其是在卸粮环节。目前,无人收获仍多采用固定点卸粮方式,此种方式下一般仍是通过人工驾驶或遥控操作无人收获机的方式从粮满作业点转移到卸粮点进行卸粮,卸粮完成后再由人工驾驶或遥控操作回到原作业点继续进行无人收割作业。主要问题及缺点有以下几点:固定点卸粮方式下,无人收获机直线收割作业中粮仓随时可能满粮,收获机到卸粮点和卸粮完成后回到原位继续作业均易受未割谷物隔断造成转移不便且转移路径较长,导致未割谷物易被碾压造成减产损失且整个收获过程效率降低;人工驾驶运粮车靠近收割机进行田间接粮的方式,受运粮车自身动力和土壤黏重度的影响,很有可能造成运粮车接粮后陷入泥土,影响整个接粮转运流程;收获机粮仓满粮后,若运粮车未就位则需要持续等待运粮车就位并卸粮后才能继续作业,严重制约了收割进度;整个卸粮过程需要人工参与,无法实现全无人自动卸粮,人工没有得到真正解放。
2、导致上述问题的主要原因主要包括以下几点:固定点卸粮方式源于人工驾驶收割作业传统,随着农机无人化作业进程的发展,卸粮方式并未创新与无人收获相匹配;任意点粮满进行卸粮的路径自主转移涉及全域动态路径规划,目前技术尚不成熟、技术成本较高。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的问题,本发明的目的在于提供一种无人协同卸粮转运车及其自主作业系统,本发明从国内尤其是南方大田粮食生产的实际需求出发,发明的基于导航路径规划的无人卸粮转运车,能够配合收获机实现无人协同卸粮、自主转运和自主卸粮,在解放人力劳动的同时,有效解决了传统收获机转移卸粮的作业时间浪费,并有效解决了因为运粮车的运力不足而导致收获机粮满后田间卸粮等待的时间,进一步保障收获机不间断作业,很大程度上提升了无人收获机综合作业效率,且本发明中的无人卸粮转运车采用机电液信融合的一体化设计思想,机械主体结构简单、具备良好底盘通过性和行走灵活性;电气系统模块化设计,各功能系统采用分布式控制思想,控制可靠性和协同性更高,并且行走及作业关键部件支持人工操作和自动控制,既能满足人工驾驶,也能在无人作业时由人工直接干预,安全性和实用性更强高。
3、2.技术方案
4、为解决上述问题,本发明采用如下的技术方案。
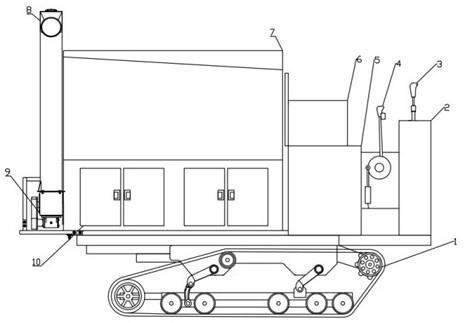
5、一种无人协同卸粮转运车及其自主作业系统,包括履带底盘,所述履带底盘上分别安装有发动机和变速箱,所述履带底盘的上端安装有防护罩,且发动机和变速箱均位于防护罩内,所述发动机和变速箱采用液压传动无极变速装置进行行走操控,所述履带底盘的上端安装有电动hst操控手柄,且电动hst操控手柄通过硬质拉线与液压传动无极变速装置相连接,所述履带底盘的上端安装有操作台架,且操作台架上安装有电动转向手柄,所述电动转向手柄通过硬质拉线与变速箱内的转向电磁阀相连接,所述履带底盘的上端安装有电气仓,所述履带底盘与电气仓之间设有卸粮机构。
6、进一步的,所述卸粮机构包括安装在电气仓上端上的粮仓,所述粮仓的左端安装有卸粮筒,且卸粮筒与履带底盘之间安装有卸粮电机。
7、进一步的,所述转运车自主作业系统主要由行走系统、转向系统、卸粮系统、导航自动驾驶系统、车载显示终端、数传终端和无人转运车ecu组成,且各系统模块间通过can总线进行数据交互和控制执行,所述转运车自主作业系统用于实现既定规划路径的高精度的前进、倒车、停车、熄火等无人行走和无人转运卸粮。
8、进一步的,所述导航自动驾驶系统通过网络rtk精准定位,并通过预打点的方式进行路径规划,所述车载显示终端用于实时显示规划路径和车辆跟踪控制,所述无人转运车ecu实时接收导航控制系统输出的当前定位和方向跟踪偏差,所述指令调控行走ecu进行hst前进、后退、停车的行走控制,所述指令调控转向ecu进行转向偏差的闭环反馈调节。
9、进一步的,所述电动hst操控手柄集成有带反馈的无刷电机,所述电动hst操控手柄支持手动操作或指令操控调节手柄前、中、后的位置。
10、进一步的,所述电动转向手柄用于支持手动操作转向和指令操作转向,所述电动转向手柄位于电动hst操控手柄的右侧。
11、进一步的,所述履带底盘的上端安装有防护栏,且防护栏位于防护罩的外侧。
12、进一步的,所述电气仓用于存放置车载控制系统和驱动系统,所述电气仓的外端安装有两对双开门,且双开门的初始状态为闭合状态。
13、一种无人协同卸粮转运车及其自主作业系统的工作机制,包括以下步骤:
14、s1、无人协同接粮:无人收获机停车等待卸粮时,通过数传终端向转运车数传终端下达卸粮指令并告知转运车其当前位置,转运车收到该指令后自动点火,并沿其工作路径向收获机移动,移动过程中卸粮车根据收获机位置和自身的高精度定位实时计算距收获机的位置,当到达收获机可靠卸粮区内时自动停车,同时通知收获机已到达卸粮点可以卸粮,此时收获机开启自动卸粮动作;
15、s2、无人转运卸粮:当转运车配合收获机完成接粮并按规划路径进行转运时,若卸粮ecu检测到粮位传感器未到达卸粮粮位,则转运车按规划路径移动到等待点等待下一次协同接粮,若粮位传感器到达卸粮粮位(卸粮位传感器信号闭合),则转运车跨过等待点继续向预设的运粮车指定点转移(运粮车的位置为固定位置,预先已经在转运车的导航系统内采集并标记),到达位置后自动升起卸粮高位、旋转卸粮筒到合适位置,随后自动结合卸粮离合进行卸粮,当粮位传感器检测到粮仓卸完后(粮仓低位传感器信号断开),卸粮ecu即断开卸粮离合、旋转卸粮筒回位、降下卸粮高位,完成自动转运卸粮,随后向等待点移动等待下一次协同接粮。
16、3.有益效果
17、相比于现有技术,本发明的优点在于:
18、(1)本发明从国内尤其是南方大田粮食生产的实际需求出发,发明的基于导航路径规划的无人卸粮转运车,能够配合收获机实现无人协同卸粮、自主转运和自主卸粮,在解放人力劳动的同时,有效解决了传统收获机转移卸粮的作业时间浪费,并有效解决了因为运粮车的运力不足而导致收获机粮满后田间卸粮等待的时间,进一步保障收获机不间断作业,很大程度上提升了无人收获机综合作业效率。
19、(2)本发明中的无人卸粮转运车采用机电液信融合的一体化设计思想,机械主体结构简单、具备良好底盘通过性和行走灵活性;电气系统模块化设计,各功能系统采用分布式控制思想,控制可靠性和协同性更高。
20、(3)行走及作业关键部件支持人工操作和自动控制,既能满足人工驾驶,也能在无人作业时由人工直接干预,安全性和实用性更强高。
技术特征:
1.一种无人协同卸粮转运车及其自主作业系统,包括履带底盘(1),其特征在于:所述履带底盘(1)上分别安装有发动机和变速箱,所述履带底盘(1)的上端安装有防护罩(5),且发动机和变速箱均位于防护罩(5)内,所述发动机和变速箱采用液压传动无极变速装置进行行走操控,所述履带底盘(1)的上端安装有电动hst操控手柄(4),且电动hst操控手柄(4)通过硬质拉线与液压传动无极变速装置相连接,所述履带底盘(1)的上端安装有操作台架(2),且操作台架(2)上安装有电动转向手柄(3),所述电动转向手柄(3)通过硬质拉线与变速箱内的转向电磁阀相连接,所述履带底盘(1)的上端安装有电气仓(10),所述履带底盘(1)与电气仓(10)之间设有卸粮机构。
2.根据权利要求1所述的一种无人协同卸粮转运车及其自主作业系统,其特征在于:所述卸粮机构包括安装在电气仓(10)上端上的粮仓(7),所述粮仓(7)的左端安装有卸粮筒(8),且卸粮筒(8)与履带底盘(1)之间安装有卸粮电机(9)。
3.根据权利要求1所述的一种无人协同卸粮转运车及其自主作业系统,其特征在于:所述转运车自主作业系统主要由行走系统、转向系统、卸粮系统、导航自动驾驶系统、车载显示终端、数传终端和无人转运车ecu组成,且各系统模块间通过can总线进行数据交互和控制执行,所述转运车自主作业系统用于实现既定规划路径的高精度的前进、倒车、停车、熄火等无人行走和无人转运卸粮。
4.根据权利要求3所述的一种无人协同卸粮转运车及其自主作业系统,其特征在于:所述导航自动驾驶系统通过网络rtk精准定位,并通过预打点的方式进行路径规划,所述车载显示终端用于实时显示规划路径和车辆跟踪控制,所述无人转运车ecu实时接收导航控制系统输出的当前定位和方向跟踪偏差,所述指令调控行走ecu进行hst前进、后退、停车的行走控制,所述指令调控转向ecu进行转向偏差的闭环反馈调节。
5.根据权利要求1所述的一种无人协同卸粮转运车及其自主作业系统,其特征在于:所述电动hst操控手柄(4)集成有带反馈的无刷电机,所述电动hst操控手柄(4)支持手动操作或指令操控调节手柄前、中、后的位置。
6.根据权利要求1所述的一种无人协同卸粮转运车及其自主作业系统,其特征在于:所述电动转向手柄(3)用于支持手动操作转向和指令操作转向,所述电动转向手柄(3)位于电动hst操控手柄(4)的右侧。
7.根据权利要求1所述的一种无人协同卸粮转运车及其自主作业系统,其特征在于:所述履带底盘(1)的上端安装有防护栏(6),且防护栏(6)位于防护罩(5)的外侧。
8.根据权利要求1所述的一种无人协同卸粮转运车及其自主作业系统,其特征在于:所述电气仓(10)用于存放置车载控制系统和驱动系统,所述电气仓(10)的外端安装有两对双开门,且双开门的初始状态为闭合状态。
9.根据权利要求1-8任一所述的一种无人协同卸粮转运车及其自主作业系统的工作机制,其特征在于:包括以下步骤:
技术总结
本发明公开了一种无人协同卸粮转运车及其自主作业系统,属于农机无人化技术领域,本发明从国内尤其是南方大田粮食生产的实际需求出发,发明的基于导航路径规划的无人卸粮转运车,能够配合收获机实现无人协同卸粮、自主转运和自主卸粮,在解放人力劳动的同时,有效解决了传统收获机转移卸粮的作业时间浪费,并有效解决了因为运粮车的运力不足而导致收获机粮满后田间卸粮等待的时间,进一步保障收获机不间断作业,很大程度上提升了无人收获机综合作业效率,且无人卸粮转运车采用机电液信融合的一体化设计思想,机械主体结构简单、具备良好底盘通过性和行走灵活性;电气系统模块化设计,各功能系统采用分布式控制思想,控制可靠性和协同性更高。
技术研发人员:刘政,金诚谦,杨腾祥,王廷恩,齐彦栋,刘岗微,冯玉岗,张光跃,陈满,倪有亮,徐金山,袁文胜,钱震杰
受保护的技术使用者:农业农村部南京农业机械化研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!