一种适用于丘陵山区果园除草的仿形避障除草装置及方法
本发明属于智能农业机械,尤其涉及一种适用于丘陵山区果园除草的仿形避障除草装置及方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、丘陵山区果园地形复杂、地面凹凸不平,现有除草机械难以贴合地面平稳运行,不易保持一致的除草高度,且容易出现漏割的情况。同时丘陵山区果园内存在果树、栅栏、立柱等固定障碍物,落石、野生动物等动态障碍物,以及不平整的地面带来的传感测距波动问题,导致自动化除草机械难以准确自主避障。
3、虽然存在一些山地果园仿形避障割草机,但是该类除草机械在丘陵山区果园凹凸不平和大坡度地貌环境中除草效果差、对树木、栅栏、立柱等障碍物避障性能较差。
技术实现思路
1、为克服上述现有技术的不足,本发明提供了一种适用于丘陵山区果园除草的仿形避障除草装置及方法,针对丘陵山区果园这类复杂的非结构化环境,设计仿形随动除草升降结构、实现电控液压仿形升降机械精准作业及其传感测距准确避障。
2、为实现上述目的,本发明的一个或多个实施例提供了如下技术方案:
3、本发明第一方面提供了一种适用于丘陵山区果园除草的仿形避障除草装置,包括:升降驱动机构、仿形机构和割草装置;
4、所述仿形机构包括:自适应弹簧、仿形机构底座、角度调节杆和升降调节杆;
5、所述仿形机构底座的下方通过自适应弹簧连接割草装置;
6、所述仿形机构底座的上方连接角度调节杆和升降调节杆;所述升降调节杆的另一端连接升降驱动机构;所述角度调节杆的另一端连接所述升降调节杆;
7、所述升降驱动机构用于驱动升降调节杆上升或下降,升降调节杆运动时带动所述仿形机构底座实现上升或下降;所述角度调节杆由气缸驱动,通过调节角度调节杆的长度调节仿形机构底座的倾斜角度;通过仿形机构底座的倾斜和升降对自适应弹簧的伸缩进行调节,从而对割草装置的高度进行调整。
8、本发明第二方面提供了一种适用于丘陵山区果园除草的仿形避障除草方法,包括自动仿形过程,所述自动仿形过程包括:
9、在除草装置行进过程中,感知地面高度变化信号并传输给控制模块,控制模块控制升降驱动机构驱动升降调节杆上升或下降,升降调节杆运动时带动仿形机构底座实现上升或下降;控制模块控制调节角度调节杆的长度,实现调节仿形机构底座的倾斜角度;通过仿形机构底座的倾斜和升降对自适应弹簧的伸缩进行调节,从而对割草装置的高度进行自适应调整。
10、以上一个或多个技术方案存在以下有益效果:
11、本发明实现了仿形随动除草升降、电控液压仿形升降机械精准作业及其传感测距准确避障,解决了除草机械在丘陵山区果园凹凸不平和大坡度地貌环境中除草效果差、对树木、栅栏、立柱等障碍物避障性能较差等问题。
12、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种适用于丘陵山区果园除草的仿形避障除草装置,其特征在于,包括:升降驱动机构、仿形机构和割草装置;
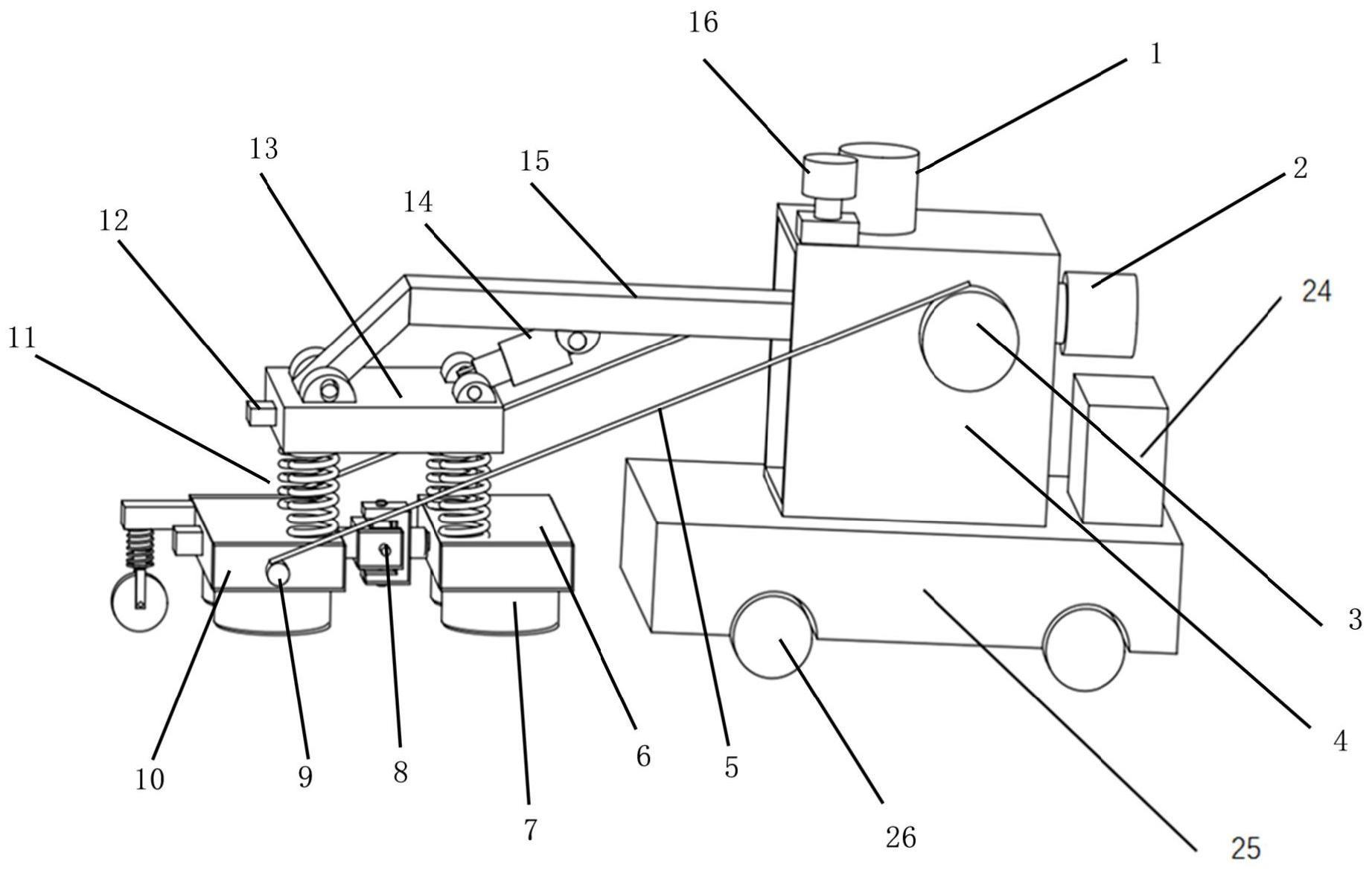
2.根据权利要求1所述的一种适用于丘陵山区果园除草的仿形避障除草装置,其特征在于,所述割草装置包括第一割草装置(6)和第二割草装置(10),第一割草装置(6)和第二割草装置(10)之间通过万向联轴器(8)连接;所述第一割草装置(6)和第二割草装置(10)分别通过自适应弹簧(11)连接所述仿形机构底座(13)。
3.根据权利要求2所述的一种适用于丘陵山区果园除草的仿形避障除草装置,其特征在于,所述第一割草装置(6)和第二割草装置(10)上分别设置割草机构。
4.根据权利要求2所述的一种适用于丘陵山区果园除草的仿形避障除草装置,其特征在于,所述第二割草装置(10)的正前方设有限深轮(21),所述限深轮(21)通过减震弹簧(20)连接限深轮固定杆(19)上,限深轮固定杆(19)固定在第二割草装置(10)上。
5.根据权利要求1所述的一种适用于丘陵山区果园除草的仿形避障除草装置,其特征在于,所述升降驱动机构包括升降驱动电机(1)和升降丝杠(23);
6.根据权利要求5所述的一种适用于丘陵山区果园除草的仿形避障除草装置,其特征在于,还包括反转调节机构,所述反转调节机构包括反转驱动装置、反转弹力绳(5)以及设置在割草装置上的反转弹力绳固定杆(9);
7.根据权利要求6所述的一种适用于丘陵山区果园除草的仿形避障除草装置,其特征在于,所述反转驱动装置和升降驱动机构均设置在控制箱(4)上,分别与设置在控制箱(4)内的控制模块连接。
8.根据权利要求6所述的一种适用于丘陵山区果园除草的仿形避障除草装置,其特征在于,还包括避障信号探测部件,所述避障信号探测部件包括设置在仿形机构底座(13)和割草装置上的超声波传感器以及激光测距仪,设置在所述控制箱(4)顶部的激光雷达;
9.一种适用于丘陵山区果园除草的仿形避障除草方法,其特征在于,包括自动仿形过程,所述自动仿形过程包括:
10.根据权利要求9所述的一种适用于丘陵山区果园除草的仿形避障除草方法,其特征在于,还包括自动避障过程,所述自动避障过程包括:
技术总结
本发明属于智能农业机械技术领域,为一种适用于丘陵山区果园除草的仿形避障除草装置及方法,包括:升降驱动机构、仿形机构和割草装置;仿形机构包括自适应弹簧、仿形机构底座、角度调节杆和升降调节杆;仿形机构底座的下方通过自适应弹簧连接割草装置;仿形机构底座的上方连接角度调节杆和升降调节杆;升降调节杆的连接升降驱动机构,角度调节杆连接升降调节杆;升降驱动机构驱动升降调节杆运动,带动仿形机构底座实现上升或下降;通过调节角度调节杆的长度调节仿形机构底座的倾斜角度;通过仿形机构底座的倾斜和升降对自适应弹簧的进行调节,从而对割草装置的高度进行调整,解决了除草机械在凹凸不平和大坡度地貌环境中除草效果差的问题。
技术研发人员:梁西昌,万熠,侯嘉瑞,陈英凯,牛平平,李亚男,张桂新,胡顺景
受保护的技术使用者:山东大学日照智能制造研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!