一种试验田用轨道式农业机器人的制作方法
本发明属于试验田用轨道式农业机器人,具体涉及一种试验田用轨道式农业机器人。
背景技术:
1、试验田是指进行农业试验的田地,就是用作农业技术人员进行品种对比、肥料对比、季节对比、病虫害防治对比等项目的农田。
2、而在病虫害防治对比完成后则需要进行施药,从而对虫害进行防护,便于试验田后续使用,施药通过人工则较为麻烦不便捷,因此现都采用机器人施药,本技术方案采用的轨道式农业机器人,相对于传动机器人,新增轨道便于调整施药位置,同时能够在施药时降低药剂损耗,节省成本,并防止药剂沉淀影响喷洒的药剂的质量。该现象成为本领域人员亟待解决的问题。
技术实现思路
1、本发明的目的在于提供一种试验田用轨道式农业机器人,以解决上述背景技术中提出的问题。
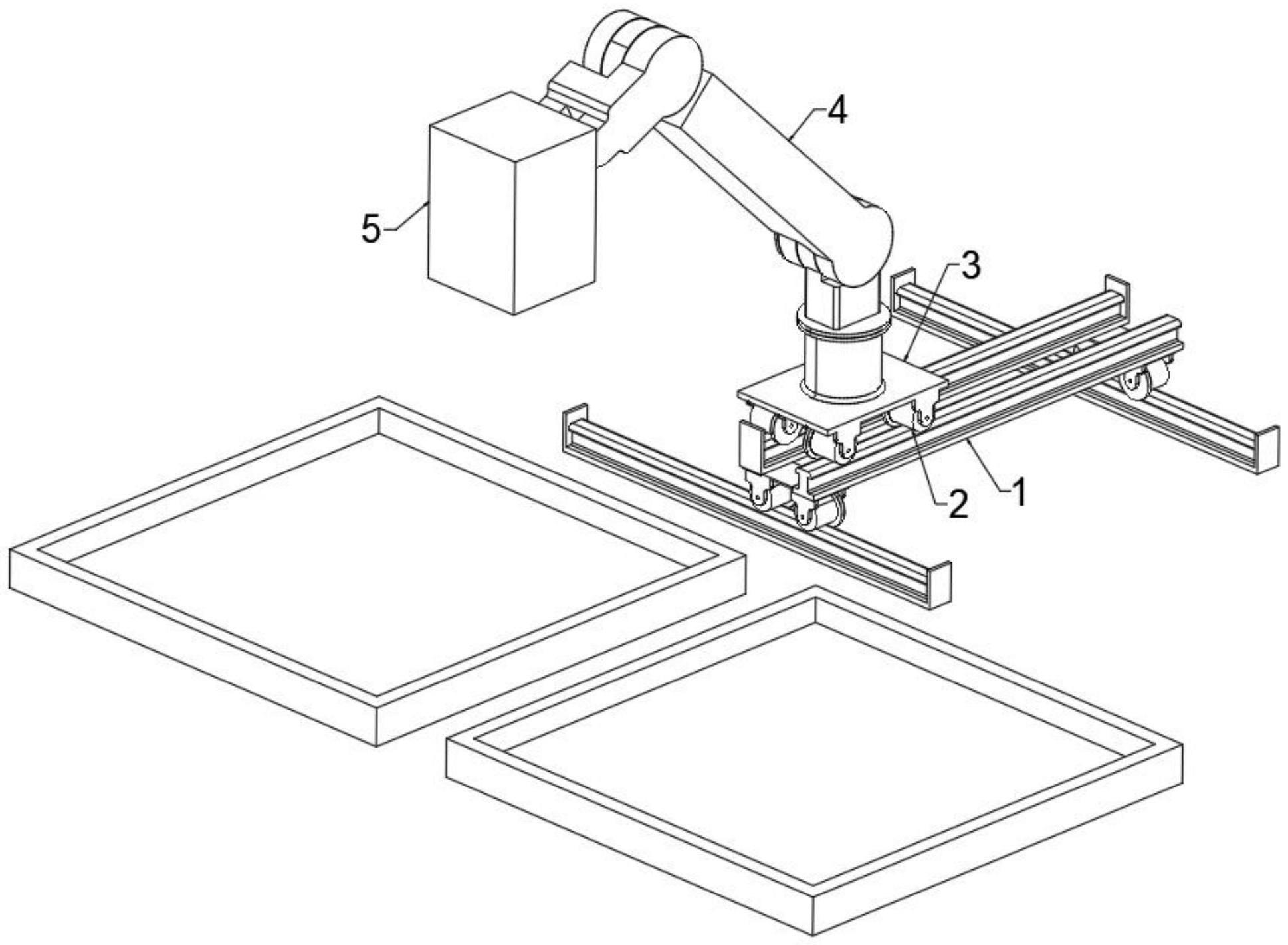
2、为了解决上述技术问题,本发明提供如下技术方案:一种试验田用轨道式农业机器人,包括轨道式农业机器人和若干试验田,所述轨道式农业机器人包括滑轨、滚轮、基座、机械臂、培养腔以及施药机构;
3、所述滚轮固定安装于基座的底部,且与滑轨滑动连接,所述机械臂固定安装于基座的上方;
4、所述培养腔固定安装于机械臂上方左端,若干所述试验田设置于培养腔的下方,所述施药机构设置于培养腔的内部。
5、本发明进一步说明,所述施药机构包括驱动部、气压腔、药剂腔以及喷头;
6、所述驱动部设置于培养腔的内部,所述气压腔、药剂腔均固定安装于培养腔的内壁上方;
7、所述气压腔位于药剂腔的左侧,且位于驱动部的上方;
8、所述药剂腔内部填充有药剂、且与喷头、气压腔管道连接,所述喷头固定安装于培养腔的底部。
9、本发明进一步说明,所述驱动部包括电机、转杆、转盘以及弧形盘;
10、所述电机固定安装于培养腔的内壁前侧,所述转杆与电机的输出端固定,所述转盘固定安装于转杆的后端;
11、所述弧形盘固定安装于转盘的外侧。
12、本发明进一步说明,所述气压腔内壁滑动连接有气压板,所述气压板下方固定有气压杆,所述气压杆下端呈弧形,且与弧形盘竖直对齐。
13、本发明进一步说明,所述气压板与气压腔内壁上方弹簧连接,所述气压腔与外界管道连接,且管道内设置有单向阀,所述气压腔与药剂腔连接的管道内设置有压力阀。
14、本发明进一步说明,所述施药机构包括搅拌部;
15、所述搅拌部包括小齿轮、大齿轮、驱动齿以及搅拌叶;
16、所述小齿轮固定安装于转盘的后端,所述大齿轮与小齿轮啮合,且与培养腔的内壁轴承连接;
17、所述搅拌叶轴承安装于药剂腔的内壁,且与驱动齿固定连接,所述驱动齿设置于药剂腔的外侧,且与大齿轮相互啮合。
18、本发明进一步说明,所述大齿轮外侧的齿数大于小齿轮以及驱动齿外侧的齿数。
19、与现有技术相比,本发明所达到的有益效果是:本发明在培育农作物过程中,操作人员通过电驱动使电机运行,电机带动转杆转动,转杆带动转盘转动,转盘带动弧形盘绕转盘中心转动,直至与气压杆下端接触,两者相互挤压,使气压杆受力推动气压板沿气压腔内壁向上滑动,弹簧受力形变,同时气压板上方的气体受到挤压后进入气压腔与药剂腔连接的管道内,被压力阀挡住,之后弧形盘转动至与气压杆脱离接触,弹簧产生的反作用力推动气压板向下移动直至复位,复位过程中通过管道从外界抽取气体,单向阀控制外界气体单向进入气压腔内,电机持续转动,从而使管道内的压力到达压力阀的压力承受极限,压力阀打开气体快速通过管道进入药剂腔内,对药剂进行挤压,使药剂通过管道进入喷头,最后从喷头喷出到农作物上,实现对农作物进行药剂喷洒;药剂喷洒过程自动化,药剂喷洒效率高,且通过药剂喷洒使农作物生长更好,保证农作物试验效果;同时通过压力阀,既能够进行间歇式喷洒药剂工作,保证药剂喷洒顺利的同时降低喷洒频次,从而减少药剂的消耗,并保证农作物的生产,且喷洒药剂时的喷洒力度能够得到加强,使药剂能够充分落到农作物上,进一步加强农作物培育质量。
技术特征:
1.一种试验田用轨道式农业机器人,包括轨道式农业机器人和若干试验田,其特征在于:所述轨道式农业机器人包括滑轨(1)、滚轮(2)、基座(3)、机械臂(4)、培养腔(5)以及施药机构;
2.根据权利要求1所述的一种试验田用轨道式农业机器人,其特征在于:所述施药机构包括驱动部、气压腔(6)、药剂腔(7)以及喷头(8);
3.根据权利要求2所述的一种试验田用轨道式农业机器人,其特征在于:所述驱动部包括电机(9)、转杆(10)、转盘(11)以及弧形盘(12);
4.根据权利要求3所述的一种试验田用轨道式农业机器人,其特征在于:所述气压腔(6)内壁滑动连接有气压板(13),所述气压板(13)下方固定有气压杆(14),所述气压杆(14)下端呈弧形,且与弧形盘(12)竖直对齐。
5.根据权利要求4所述的一种试验田用轨道式农业机器人,其特征在于:所述气压板(13)与气压腔(6)内壁上方弹簧连接,所述气压腔(6)与外界管道连接,且管道内设置有单向阀,所述气压腔(6)与药剂腔(7)连接的管道内设置有压力阀(15)。
6.根据权利要求5所述的一种试验田用轨道式农业机器人,其特征在于:所述施药机构包括搅拌部;
7.根据权利要求6所述的一种试验田用轨道式农业机器人,其特征在于:所述大齿轮(17)外侧的齿数大于小齿轮(16)以及驱动齿(18)外侧的齿数。
技术总结
本发明属于试验田用轨道式农业机器人技术领域,具体涉及一种试验田用轨道式农业机器人,其中包括轨道式农业机器人和若干试验田,所述轨道式农业机器人包括滑轨、滚轮、基座、机械臂、培养腔以及施药机构;所述滚轮固定安装于基座的底部,且与滑轨滑动连接,所述机械臂固定安装于基座的上方;所述培养腔固定安装于机械臂上方左端,若干所述试验田设置于培养腔的下方,所述施药机构设置于培养腔的内部,所述施药机构包括驱动部、气压腔、药剂腔以及喷头;所述驱动部设置于培养腔的内部,所述气压腔、药剂腔均固定安装于培养腔的内壁上方;该装置解决了当前农业机器人无法较好的调整位置,并在培育农作物时提高培育质量,保护农作物的问题。
技术研发人员:章新寅,杨艺,陈骏程
受保护的技术使用者:苏州极智飞智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!