作业车辆的制作方法
本发明涉及插秧机、拖拉机等的作业车辆。
背景技术:
1、在插秧机、拖拉机等作业车辆中,已知如下技术,即,为了能够选择性地连接苗栽种装置20、除草装置40作为作业机,且限制在连接有质量轻的作业机的状态下的最高速度,在未装配作业机的情况下、在装配有除草装置40的情况下,检测发动机的转速,当发动机转速超过容许值时,发出警报,在装配有苗栽种装置20的情况下,不进行发动机转速的检测(专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2008-79515号公报
技术实现思路
1、发明所要解决的课题
2、在如专利文献1记载的技术那样能够装卸、更换作业机的作业车辆中,有时在由于连接作业机和车辆主体的连接器的忘记连接或未完全连接等而使作业机的连接为不完全的状态下、或者在卸下了作业机的状态下误行驶。
3、若在作业机的连接不完全或者卸下了作业机的状态下进行自主行驶(自动行驶、无人行驶),则存在作业不能正常进行或者作业机破损的担忧。特别是,在进行自主行驶的技术中,通常在作成自主行驶路径之前,进行使作业车辆沿农田的外周行驶来取得成为自主行驶时的基准的农田的范围的动作(基准数据取得模式、示教模式),但是,即使在作业机的连接不完全的状态下执行示教模式后明确了作业机的连接不完全,在消除作业机的连接不完全后,还要再次执行示教模式,存在浪费时间、劳力的问题。
4、本发明的技术课题在于,与在作业机的连接不完全的状态下开始自主行驶的情况相比,削减时间、劳力的浪费。
5、用于解决课题的方案
6、本发明的上述课题通过以下的解决方案来解决。
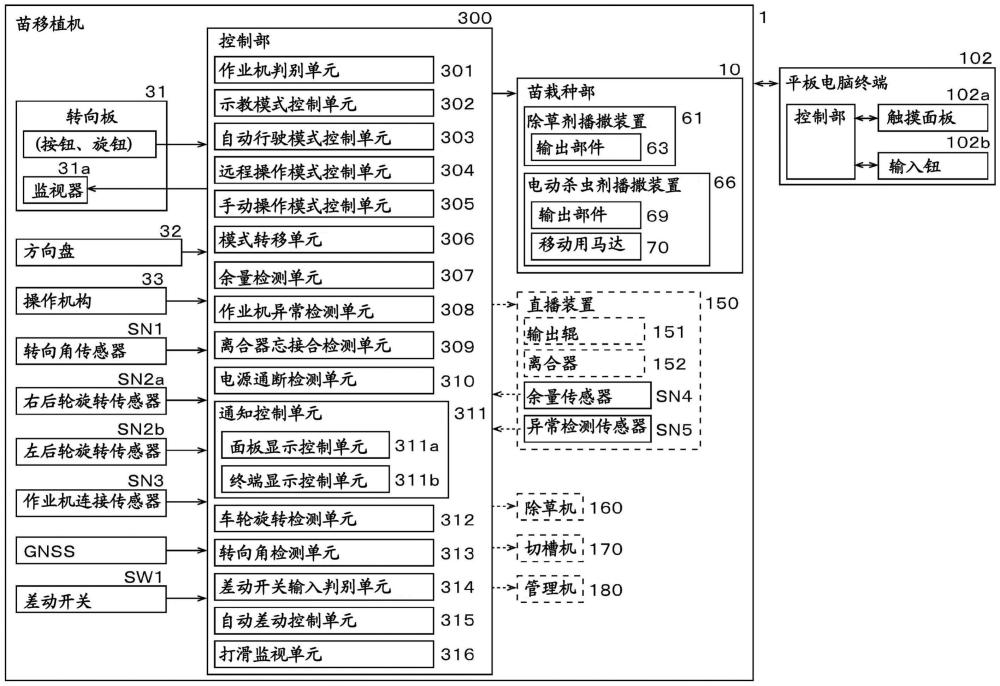
7、方案1为一种作业车辆,其特征在于,具备:能够连接对农田进行作业的作业机的车体4;基于人工操作的手动行驶模式;以及基于上述农田的基准数据使上述车体4行驶的自动行驶模式,在上述作业机为非连接的情况下,禁止上述自动行驶模式。
8、方案2根据方案1记载的作业车辆,其特征在于,上述车体4能够连接去除农田的草的除草机160、形成农田内的水的流路的切槽机170以及进行药剂的播撒的管理机180的任一个,作为上述作业机,具备控制单元300,在上述除草机160、上述切槽机170以及上述管理机180的任一个被连接的情况下,上述控制单元限制向上述自动行驶模式的转移。
9、方案3根据方案2记载的作业车辆,其特征在于,具备监视器,该监视器显示与连接着的作业机相关的项目和上述项目的设定值,当将栽种装置以外的装置连接于上述车体4时,显示与栽种装置相关的项目,但不显示上述项目的至少一部分的设定值。
10、方案4根据方案2记载的作业车辆,其特征在于,具备监视器,该监视器显示与连接着的作业机相关的项目和上述项目的设定值,具有从垫状的苗中将苗栽种于农田的栽种装置10作为作业机,当替代上述栽种装置10而将直播装置150连接于上述车体4时,显示栽种深度的设定值,不显示与垫状的苗相关的设定值。
11、方案5根据方案1~4中任一项所记载的作业车辆,其特征在于,具备取得上述农田的基准数据的基准数据取得模式,在上述作业机为非连接的情况下,禁止上述基准数据取得模式。
12、方案6根据方案1~4中任一项所记载的作业车辆,其特征在于,具备基于来自能够远程操作上述车体4的行驶的远程操作件102的输入而使上述车体4行驶的远程操作模式,在上述作业机为非连接的情况下,禁止上述远程操作模式。
13、发明的效果
14、根据方案1记载的发明,在作业机为未连接的情况下,通过禁止自动行驶模式,从而与在作业机的连接不完全的状态下开始自主行驶的情况相比,能够减少时间、劳力的浪费。
15、根据方案2记载的发明,在方案1记载的发明的效果的基础上,通过具备在连接除草机、切槽机以及管理机的任一个的情况下,限制向自动行驶模式的转移的控制单元,能够限制自主行驶。
16、根据方案3记载的发明,在方案2记载的发明的效果的基础上,能够提高使用便利性。
17、根据方案4记载的发明,在方案2记载的发明的效果的基础上,能够提高使用便利性。
18、根据方案5记载的发明,在方案1~4中的任一项记载的发明的效果的基础上,通过在作业机为非连接的情况下,禁止基准数据取得模式,从而能够限制自主行驶。
19、根据方案6记载的发明,在方案1~4中的任一项记载的发明的效果的基础上,通过在作业机为非连接的情况下,禁止上述远程操作模式,从而能够防止不正常地进行作业。
技术特征:
1.一种作业车辆,其特征在于,具备:
2.根据权利要求1所述的作业车辆,其特征在于,
3.根据权利要求2所述的作业车辆,其特征在于,
4.根据权利要求2所述的作业车辆,其特征在于,
5.根据权利要求1~4中任一项所述的作业车辆,其特征在于,
6.根据权利要求1~4中任一项所述的作业车辆,其特征在于,
技术总结
本发明提供一种作业车辆,与在作业机的安装为不完全的状态下开始自主行驶的情况相比,能够减少时间、劳力的浪费。该作业车辆的特征在于,具备:能够连接对农田进行作业的作业机的车体(4);基于人工操作的手动行驶模式;以及基于上述农田的基准数据使上述车体(4)行驶的自动行驶模式,在上述作业机为非连接的情况下,禁止上述自动行驶模式。
技术研发人员:池田一生,高桥学,藤本和之,川上修平,三宅浩喜,飞田秀平,铃木悠太,小佐野光,山田信芳
受保护的技术使用者:井关农机株式会社
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!