一种切割刀具、无人机以及树障清理方法与流程
本发明涉及树障清理设备,特别是涉及一种切割刀具、无人机以及树障清理方法。
背景技术:
1、近年来,速生林被大面积种植,造成电网企业每年都会发生线树安全距离不足导致输电线路跳闸的情况,对电网安全稳定运行、供电可靠性均造成了极大威胁。如何清理安全距离不足的输电线路沿线树障一直是困扰着输电线路运行人员的一道难题。
2、现有技术主要通过两种手段进行,一是人工修剪,二是无人机修剪,人工修剪安全性较低;无人机修剪一般将单锯类型的切割刀具,直接安装于无人机上进行树障清理,由于树枝具有弹性,切割刀具和树枝之间容易打滑,造成切割效率不高,此外,由于无人机的切割刀具修剪角度固定,不易调整,对于复杂的树障的清理效果不佳,容易造成无人机坠毁,造成损失,同时还需人工对复杂的树障进行辅助修剪,安全性较低、工作效率较低。
技术实现思路
1、本发明的目的是:提供一种切割刀具、无人机以及树障清理方法,旨在解决现有技术中无人机的切割刀具和树枝之间容易打滑、修剪角度固定、不易调整、无法应对复杂树障的清理、工作效率低、安全性较低的技术问题。
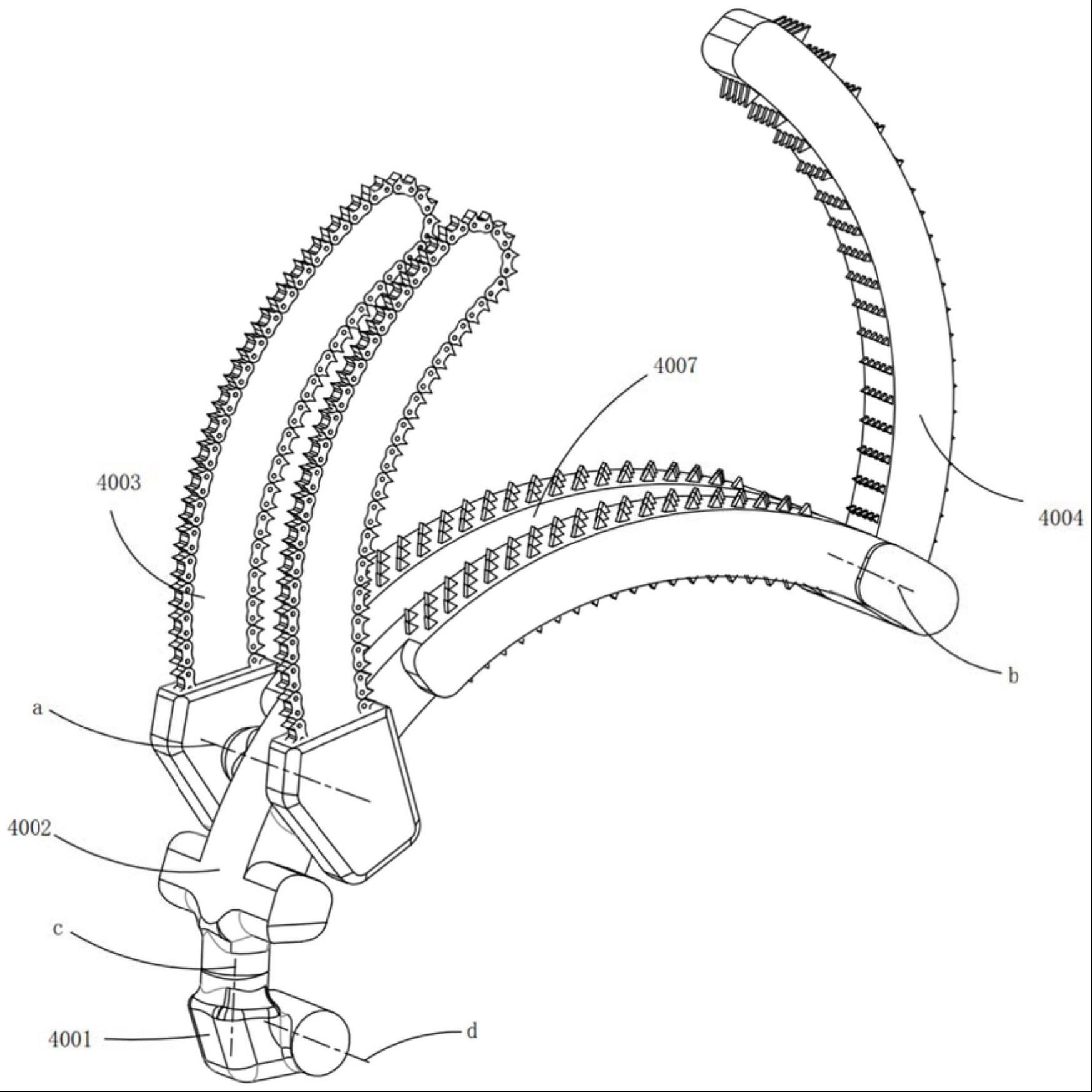
2、为了实现上述目的,本发明提供了一种切割刀具,包括第一支架,所述第一支架沿第一方向的至少一侧设有切割刀锯,所述切割刀锯和所述第一支架转动连接并形成第一转动轴,所述第一转动轴与所述第一方向平行,所述第一支架上设有和所述切割刀锯相对的夹持支架,所述夹持支架和所述第一支架转动连接并形成第二转动轴,所述夹持支架和所述切割刀锯在所述第一方向上错位设置;
3、其中,所述切割刀锯、所述夹持支架分别由固定在所述第一支架上的第一驱动装置和第二驱动装置提供驱动力,所述夹持支架在所述第一驱动装置的带动下转动至和所述第一支架呈一定角度并用于夹持树枝;所述切割刀锯在所述第二驱动装置的带动下转动并用于切割树枝。
4、更进一步地,还包括有旋转组件,所述旋转组件包括第二支架,所述第二支架上包括第三驱动装置,所述第三驱动装置的输出端和所述第一支架转动连接并形成第三转动轴,所述第三转动轴和所述第一转动轴垂直。
5、更进一步地,所述第一支架沿所述第一方向的两侧均设有所述切割刀锯,所述第一支架上设有通槽,所述夹持支架能够相对所述第一支架转动并容置于所述通槽内。
6、更进一步地,所述第一支架沿所述切割刀锯转动方向的相对两侧面均间隔设有向外延伸的凸刺,所述夹持支架沿其转动方向的相对两侧面均间隔设有若干组向外延伸的夹持刺。
7、更进一步地,所述夹持支架与所述第一支架转动连接的一端为近端部、远离所述第一支架的一端为远端部;其中,沿所述远端部向所述近端部的方向,若干组所述夹持刺之间的间隔逐渐缩小,若干组所述夹持刺向外延伸的长度依次递减。
8、更进一步地,所述第一支架、所述切割刀锯以及所述夹持支架均为弧形结构。
9、本发明还提供一种无人机,包括上述所述的切割刀具,还包括有无人机主体、电源模块以及旋转支架,所述切割刀具安装于所述旋转支架,所述旋转支架设有用于容纳所述无人机主体的容纳腔,所述无人机主体设于所述容纳腔内,所述无人机主体内设有驱动机构,所述切割刀具、所述驱动机构和所述电源模块电连接,所述驱动机构的输出端设有传动齿轮,所述容纳腔的内侧壁设有驱动齿,所述传动齿轮和所述驱动齿啮合以驱动所述旋转支架相对所述无人机主体转动。
10、更进一步地,所述旋转支架顶部设有安装槽,所述切割刀具转动安装在所述安装槽内,所述旋转支架上设有第四驱动装置,所述第四驱动装置用于带动所述切割刀具相对所述旋转支架转动并形成第四转动轴,所述第四转动轴与所述第一转动轴平行。
11、更进一步地,还包括有设有视觉检测模块或传感器模块。
12、本发明还提供一种树障清理方法,采用上述所述的无人机,包括如下步骤:
13、控制无人机飞行至树障清理位置,切割刀具转动至树枝切割位置,第一支架、第二支架转动,进行第一次位姿调整,使树枝处于夹持支架的夹持范围,夹持支架转动夹持树枝,切割刀锯旋转进行切割;
14、完成切割后,夹持支架保持对树枝的夹持状态,通过遥控器控制无人机飞行至树枝抛投位置,第一支架、第二支架以及旋转支架转动,进行第二次位姿调整,夹持支架打开对树枝进行抛投。
15、本发明提供的一种切割刀具与现有技术相比,其有益效果在于:设有第一支架、切割刀锯以及夹持支架,在进行树枝切割前先对树枝进行夹持固定,随后切割刀具对树枝进行切割,避免切割时打滑;此外,切割刀具以及夹持支架均和第一支架转动连接,可调整夹持松紧,并且调整切割刀具的修剪角度,可适用复杂树障清理,提高了工作效率;本发明提供的一种无人机,具有旋转支架,可通过驱动机构使旋转支架转动对切割刀具的整体修剪位置进行调整,位置调节方便,提高工作效率,安全性高;本发明还提供了一种树障清理方法,在进行树枝切割时,进行第一次位姿调整,方便对树枝进行夹持,在切割完成后,进行第二次位姿调整,避免抛弃树枝时干涉到无人机飞行,控制稳定可靠。
技术特征:
1.一种切割刀具,其特征在于:包括第一支架(4002),所述第一支架(4002)沿第一方向的至少一侧设有切割刀锯(4003),所述切割刀锯(4003)和所述第一支架(4002)转动连接并形成第一转动轴,所述第一转动轴与所述第一方向平行,所述第一支架(4002)上设有和所述切割刀锯(4003)相对的夹持支架(4004),所述夹持支架(4004)和所述第一支架(4002)转动连接并形成第二转动轴,所述夹持支架(4004)和所述切割刀锯(4003)在所述第一方向上错位设置;
2.如权利要求1所述的切割刀具,其特征在于:还包括有旋转组件,所述旋转组件包括第二支架(4001),所述第二支架(4001)上包括第三驱动装置,所述第三驱动装置的输出端和所述第一支架(4002)转动连接并形成第三转动轴,所述第三转动轴和所述第一转动轴垂直。
3.如权利要求1所述的切割刀具,其特征在于:所述第一支架(4002)沿所述第一方向的两侧均设有所述切割刀锯(4003),所述第一支架(4002)上设有通槽(4007),所述夹持支架(4004)能够相对所述第一支架(4002)转动并容置于所述通槽(4007)内。
4.如权利要求1所述的切割刀具,其特征在于:所述第一支架(4002)沿所述切割刀锯(4003)转动方向的相对两侧面均间隔设有向外延伸的凸刺(4005),所述夹持支架(4004)沿其转动方向的相对两侧面均间隔设有若干组向外延伸的夹持刺(4006)。
5.如权利要求4所述的切割刀具,其特征在于:所述夹持支架(4004)与所述第一支架(4002)转动连接的一端为近端部、远离所述第一支架(4002)的一端为远端部;其中,沿所述远端部向所述近端部的方向,若干组所述夹持刺(4006)之间的间隔逐渐缩小,若干组所述夹持刺(4006)向外延伸的长度依次递减。
6.如权利要求1所述的切割刀具,其特征在于:所述第一支架(4002)、所述切割刀锯(4003)以及所述夹持支架(4004)均为弧形结构。
7.一种无人机,包括权利要求2-6任一项所述的切割刀具,其特征在于:还包括有无人机主体(1)、电源模块(2)以及旋转支架(3),所述切割刀具安装于所述旋转支架(3),所述旋转支架(3)设有用于容纳所述无人机主体(1)的容纳腔,所述无人机主体(1)设于所述容纳腔内,所述无人机主体(1)内设有驱动机构,所述切割刀具、所述驱动机构和所述电源模块(2)电连接,所述驱动机构的输出端设有传动齿轮,所述容纳腔的内侧壁设有驱动齿(3001),所述传动齿轮和所述驱动齿(3001)啮合以驱动所述旋转支架(3)相对所述无人机主体(1)转动。
8.如权利要求7所述的无人机,其特征在于:所述旋转支架(3)顶部设有安装槽(3005),所述切割刀具转动安装在所述安装槽(3005)内,所述旋转支架(3)上设有第四驱动装置,所述第四驱动装置用于带动所述切割刀具相对所述旋转支架(3)转动并形成第四转动轴,所述第四转动轴与所述第一转动轴平行。
9.如权利要求7所述的无人机,其特征在于:还包括有设有视觉检测模块或传感器模块。
10.一种树障清理方法,采用权利要求7-9任一项所述的无人机,其特征在于,包括如下步骤:
技术总结
本发明涉及树障清理设备技术领域,公开了一种切割刀具、无人机以及树障清理方法,该切割刀具包括第一支架,所述第一支架沿第一方向的至少一侧设有切割刀锯,所述切割刀锯和所述第一支架转动连接并形成第一转动轴,所述第一转动轴与所述第一方向平行,所述第一支架上设有和所述切割刀锯相对的夹持支架,所述夹持支架和所述第一支架转动连接并形成第二转动轴,所述夹持支架和所述切割刀锯在所述第一方向上错位设置;所述切割刀锯、所述夹持支架分别由固定在所述第一支架上的第一驱动装置和第二驱动装置提供驱动力。本发明的有益效果为:切割刀具和树枝之间夹持稳定、修剪角度可调、可应对复杂树障的清理工况,工作效率高,安全性高。
技术研发人员:赵旭异,郑钦调,叶镛静,梁胡平,肖郭璇,许祥希,苟培荣,肖禧超,胡朋杰
受保护的技术使用者:国网浙江省电力有限公司乐清市供电公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!