一种精准采摘的智能避障采摘机器人的制作方法
本发明涉及智能采摘机器人,具体为一种精准采摘的智能避障采摘机器人。
背景技术:
1、随着机器人技术的成熟、成本的降低和推广应用,机器人已逐步进入到农业领域,并将促进现代化农业向着工业化生产、无人化和智能化的方向发展,果蔬的采摘具有季节性强、劳动强度大、环境以及作业要求高等特点,在农业生产中迫切需要机器人化作业;
2、公开号为cn207443493u的中国专利公开了一种番茄采摘的智能机器人,该番茄采摘的智能机器人能够实现自动采摘番茄作业,可大大节省人力物力,降低种植成本,提高采摘效率,实用性好。
3、上述专利中,机器人通过夹具夹持来实现番茄采摘作用,但这种爪具采摘结构无法精准地把控好采摘力度,一旦力度过大会导致番茄表面破损,过小则无法实现夹持移动;因此,不满足现有的需求,对此提出了一种精准采摘的智能避障采摘机器人。
技术实现思路
1、本发明的目的在于提供一种精准采摘的智能避障采摘机器人,采摘器组件区别于传统的网兜和爪具结构,通过果实自身的重力配合弹性爪杆来实现夹持操作,这样可以有效的避免采摘过程中导致的果实表皮受损的情况出现,可以解决现有技术中的问题。
2、为实现上述目的,本发明提供如下技术方案:
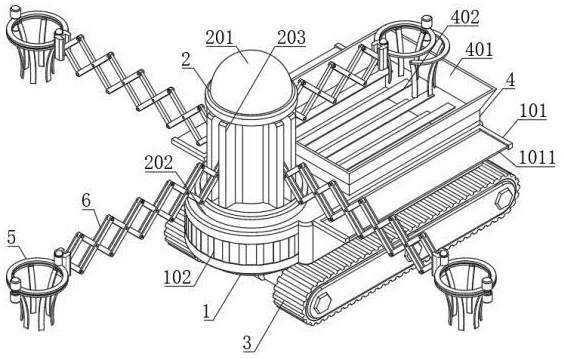
3、一种精准采摘的智能避障采摘机器人,包括智能车架、中控机组和行进履带,还包括采摘器组件,其设置于中控机组的四周,所述采摘器组件通过伸展绞架与中控机组连接,所述中控机组设置在智能车架的一端,智能车架的另一端设置有置物斗,所述置物斗通过装斗槽与智能车架滑动连接,所述置物斗内部设置有收纳舱,收纳舱的内部设置有多个弹力扎带,所述中控机组的通过中转轴座与智能车架转动连接,中转轴座下方的旋转感应雷达与智能车架转动连接,所述中控机组的顶部设置有环境视觉探头,置物斗上端前后侧壁对称设置滑槽,两个滑槽之间设置有摆动板,摆动板前后侧壁设置减震垫,减震垫远离摆动板一侧设置若干缓冲丝,缓冲丝采用柔软防滑材质制成,摆动板内设置转动轴,转动轴前后两端分别与前后两侧滑槽内壁上下滑动连接,置物斗前后两端设置固定板,固定板上设置减震座,减震座内滑动设置减震板,减震板上端与转动轴转动连接,减震板底部设置减震弹簧。
4、优选的,所述行进履带包括驱动轮和履带主体,驱动轮之间设置有底盘传动组件,所述底盘传动组件安装在智能车架的底部,履带主体与驱动轮啮合转动连接,所述智能车架的两侧均设置有侧展网架,侧展网架的外表面设置有弹性织网。
5、优选的,所述中控机组的外表面设置有四个电控垂轨,所述伸展绞架包括双臂绞杆和单臂绞杆,双臂绞杆与单臂绞杆转动连接,所述双臂绞杆和单臂绞杆的一端均设置有电控夹套,电控夹套与电控垂轨滑动连接。
6、优选的,所述双臂绞杆和单臂绞杆均与电控夹套转动连接,所述双臂绞杆和单臂绞杆的另一端设置有载接端头,所述采摘器组件包括装配机盒、套口环箍和束位环箍,装配机盒与载接端头转动连接,所述套口环箍安装在束位环箍的上方,套口环箍与束位环箍之间设置有剪枝闸刀,所述套口环箍的一侧设置有剪切电机,剪枝闸刀与剪切电机转动连接。
7、优选的,所述束位环箍包括活动环板和固位环板,固位环板的一侧设置有开合电机,所述活动环板和固位环板内侧均设置有弹性爪杆,弹性爪杆设置为拱形结构,所述弹性爪杆的一端通过弹簧阻力轴分别与活动环板和固位环板转动连接。
8、优选的,所述固位环板和套口环箍与装配机盒通过螺钉连接,所述活动环板通过开合电机与固位环板转动连接,活动环板的转动角度设置为0-30°。
9、优选的,所述装配机盒的顶部设置有成色分析探头,成色分析探头、旋转感应雷达和环境视觉探头均与ai处理模块交互连接,ai处理模块用于对采集的数据进行统一的规划分析,并基于信息作出相应的判断。
10、优选的,所述ai处理模块的输出端与执行控制单元交互,执行控制单元分别与剪切电机、开合电机、中转轴座和履带驱动单元交互连接,其中,执行控制单元用于执行发送ai处理模块综合数据作出的判断指令,所述履带驱动单元与底盘传动组件电性连接。
11、优选的,位于置物斗前端的减震板前侧壁设置安装板,安装板垂直于减震板,安装板上设置驱动电机,驱动电机输出端设置转动杆,转动杆远离驱动电机一端与连接杆一端铰接连接,连接杆另一端与齿条一端铰接连接,齿条下表面与安装板上表面滑动连接,齿条上方设置齿轮,齿轮与齿条上表面啮合,齿轮与转动轴一端固定连接,减震座内设置接触开关,接触开关位于减震板下方,接触开关与驱动电机电性连接。
12、优选的,还包括监测组件,监测组件包括位移传感器,位移传感器设置在减震板上,用于检测减震板的向下滑动距离,置物斗上设置控制器及报警器,控制器分别与位移传感器、报警器电性连接,控制器基于位移传感器的检测值控制报警器工作,包括以下步骤:
13、步骤1:基于位移传感器的检测值,通过以下公式计算减震弹簧受到的实际剪应力:
14、
15、其中,为减震弹簧受到的实际剪应力,为减震弹簧的外径,为减震弹簧的弹簧丝直径,为减震弹簧的劲度系数,为减震弹簧的初始长度,为位移传感器检测的减震板的向下滑动距离;
16、步骤2:基于步骤1的计算结果,当减震弹簧受到的实际剪应力大于预设最大剪应力时,控制器控制报警器发出报警提示。
17、与现有技术相比,本发明的有益效果是:
18、1、本发明,智能车架通过底部的行进履带来进行移动,两侧的行进履带都为独立的电机驱动控制,可以实现单侧移动操作,从而实现转向操作,移动过程中通过中控机组顶部的环境视觉探头以及车架前端的旋转感应雷达来感应车架周边的路径信息,从而实现自动化的避障操作;
19、2、本发明,采摘器组件区别于传统的网兜和爪具结构,通过果实自身的重力配合弹性爪杆来实现夹持操作,这样可以有效的避免采摘过程中导致的果实表皮受损的情况出现;
20、3、本发明,拱形结构的弹性爪杆之间呈环形分布,最高点区域都朝向内侧,这样可以形成一个上宽下窄套装结构,果实自上方落入到弹性爪杆,通过弹性爪杆来托起果实,在托起的过程中,弹性爪杆会代替果实的连接根茎来承受其重力,随着承受重力的正价果实会下滑将弹性爪杆撑开,用于实现弹性爪杆转动的弹簧阻力轴可以进行最大转动角度的设置,设置条件是根据采摘果实的最大成果尺寸来进行调节。
技术特征:
1.一种精准采摘的智能避障采摘机器人,包括智能车架(1)、中控机组(2)和行进履带(3),其特征在于:
2.根据权利要求1所述的一种精准采摘的智能避障采摘机器人,其特征在于:所述行进履带(3)包括驱动轮(301)和履带主体(302),驱动轮(301)之间设置有底盘传动组件(303),所述底盘传动组件(303)安装在智能车架(1)的底部,履带主体(302)与驱动轮(301)啮合转动连接,所述智能车架(1)的两侧均设置有侧展网架(101),侧展网架(101)的外表面设置有弹性织网(1011)。
3.根据权利要求2所述的一种精准采摘的智能避障采摘机器人,其特征在于:所述中控机组(2)的外表面设置有四个电控垂轨(203),所述伸展绞架(6)包括双臂绞杆(601)和单臂绞杆(602),双臂绞杆(601)与单臂绞杆(602)转动连接,所述双臂绞杆(601)和单臂绞杆(602)的一端均设置有电控夹套(603),电控夹套(603)与电控垂轨(203)滑动连接。
4.根据权利要求3所述的一种精准采摘的智能避障采摘机器人,其特征在于:所述双臂绞杆(601)和单臂绞杆(602)均与电控夹套(603)转动连接,所述双臂绞杆(601)和单臂绞杆(602)的另一端设置有载接端头(604),所述采摘器组件(5)包括装配机盒(501)、套口环箍(503)和束位环箍(504),装配机盒(501)与载接端头(604)转动连接,所述套口环箍(503)安装在束位环箍(504)的上方,套口环箍(503)与束位环箍(504)之间设置有剪枝闸刀(508),所述套口环箍(503)的一侧设置有剪切电机(506),剪枝闸刀(508)与剪切电机(506)转动连接。
5.根据权利要求4所述的一种精准采摘的智能避障采摘机器人,其特征在于:所述束位环箍(504)包括活动环板(5041)和固位环板(5042),固位环板(5042)的一侧设置有开合电机(507),所述活动环板(5041)和固位环板(5042)内侧均设置有弹性爪杆(505),弹性爪杆(505)设置为拱形结构,所述弹性爪杆(505)的一端通过弹簧阻力轴(5051)分别与活动环板(5041)和固位环板(5042)转动连接。
6.根据权利要求5所述的一种精准采摘的智能避障采摘机器人,其特征在于:所述固位环板(5042)和套口环箍(503)与装配机盒(501)通过螺钉连接,所述活动环板(5041)通过开合电机(507)与固位环板(5042)转动连接,活动环板(5041)的转动角度设置为0-30°。
7.根据权利要求6所述的一种精准采摘的智能避障采摘机器人,其特征在于:所述装配机盒(501)的顶部设置有成色分析探头(502),成色分析探头(502)、旋转感应雷达(102)和环境视觉探头(201)均与ai处理模块(7)交互连接,ai处理模块(7)用于对采集的数据进行统一的规划分析,并基于信息作出相应的判断。
8.根据权利要求7所述的一种精准采摘的智能避障采摘机器人,其特征在于:所述ai处理模块(7)的输出端与执行控制单元(701)交互,执行控制单元(701)分别与剪切电机(506)、开合电机(507)、中转轴座(202)和履带驱动单元(702)交互连接,其中,执行控制单元(701)用于执行发送ai处理模块(7)综合数据作出的判断指令,所述履带驱动单元(702)与底盘传动组件(303)电性连接。
9.根据权利要求1所述的一种精准采摘的智能避障采摘机器人,其特征在于:位于置物斗(4)前端的减震板(410)前侧壁设置安装板(412),安装板(412)垂直于减震板(410),安装板(412)上设置驱动电机(413),驱动电机(413)输出端设置转动杆(414),转动杆(414)远离驱动电机(413)一端与连接杆(415)一端铰接连接,连接杆(415)另一端与齿条(416)一端铰接连接,齿条(416)下表面与安装板(412)上表面滑动连接,齿条(416)上方设置齿轮(417),齿轮(417)与齿条(416)上表面啮合,齿轮(417)与转动轴(407)一端固定连接,减震座(409)内设置接触开关(418),接触开关(418)位于减震板(410)下方,接触开关(418)与驱动电机(413)电性连接。
10.根据权利要求9所述的一种精准采摘的智能避障采摘机器人,其特征在于:
技术总结
本发明公开了一种精准采摘的智能避障采摘机器人,属于智能采摘机器人技术领域。一种精准采摘的智能避障采摘机器人,包括智能车架、中控机组和行进履带,还包括采摘器组件,其设置于中控机组的四周,所述采摘器组件通过伸展绞架与中控机组连接,所述中控机组设置在智能车架的一端,智能车架的另一端设置有置物斗,所述置物斗通过装斗槽与智能车架滑动连接。为解决爪具采摘结构无法精准地把控好采摘力度,一旦力度过大会导致番茄表面破损,过小则无法实现夹持移动的问题,采摘器组件区别于传统的网兜和爪具结构,通过果实自身的重力配合弹性爪杆来实现夹持操作,这样可以有效的避免采摘过程中导致的果实表皮受损的情况出现。
技术研发人员:颜爱忠,宋成法
受保护的技术使用者:中苏科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!