一种自动识别父本和S型路线飞行的大型无人机杂交水稻授粉系统
本发明涉及无人机杂交水稻授粉,具体为一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统。
背景技术:
1、水稻是我国人民最重要的口粮作物,杂交水稻推广面积最大,然而目前杂交水稻的大面积制种主要依靠人工利用绳子拉花赶粉,制种期间一般温度较高,拉花赶粉又在中午,需要很多人工,而且劳动强度很大,在当前农村劳动力缺乏的情况下,利用机械化的无人机杂交水稻授粉系统就显得特别重要。无人机杂交水稻授粉系统可以通过计算机视觉和图像处理技术,准确地识别水稻父本行位置。这样,无人机就能够根据预先设定的授粉参数,自动确定最佳授粉线路、飞行高度以及行进速度,确保授粉效果,提高制种的结实率和产量,减少空壳粒比例。因此,开发一种能够自动化无人机杂交水稻授粉系统对于降低劳动力成本,减少劳动力强度,实现智慧农业管理非常重要,所以在此提出了一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统。
2、目前,水稻授粉的方式也有以无人机授粉手段,通过人工操控无人机进行实时的水稻授粉,但是人工操作的无人机授粉方式,第一,必须长时间在温度很高的田间操作,让人感到不适,甚至中暑,第二局限于使用者的自我判断,人为的判断可能会出现授粉上的误差,以及人为的判断有时候无法准确的估算无人机剩余电量,导致无人机无法返回,这时候就要浪费人力资源进行寻找。所以,在此提出了一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,在授粉之前自动收集稻田的父母本图像数据以及距离高度数据,并自动的拟定s型飞行路线,无需人工实时的监控操作,并且在电量较低时自动计算出剩余电量可以飞行的路程,确保能够顺利返回,提升了授粉效率的同时还提高的无人机授粉的安全性。
技术实现思路
1、针对现有技术中无人机授粉防止局限于使用者的自我判断,人为的判断可能会出现授粉上的误差,以及人为的判断有时候无法准确的估算无人机剩余电量,导致无人机无法返回的不足,本发明提供了一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,具备无需人工实时的监控操作,并且在电量较低时自动计算出剩余电量可以飞行的路程,确保能够顺利返回,提升了授粉效率的同时还提高的无人机授粉的安全性的优点。
2、为实现上述目的,本发明提供如下技术方案:一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,包括用于获取水稻父本与传感器实时距离高度以及获取水稻父本位置的传感器设备;
3、用于获取水稻父本环境的图像数据的图像数据采集模块;
4、用于无人机执行各种命令的无人机控制模块;
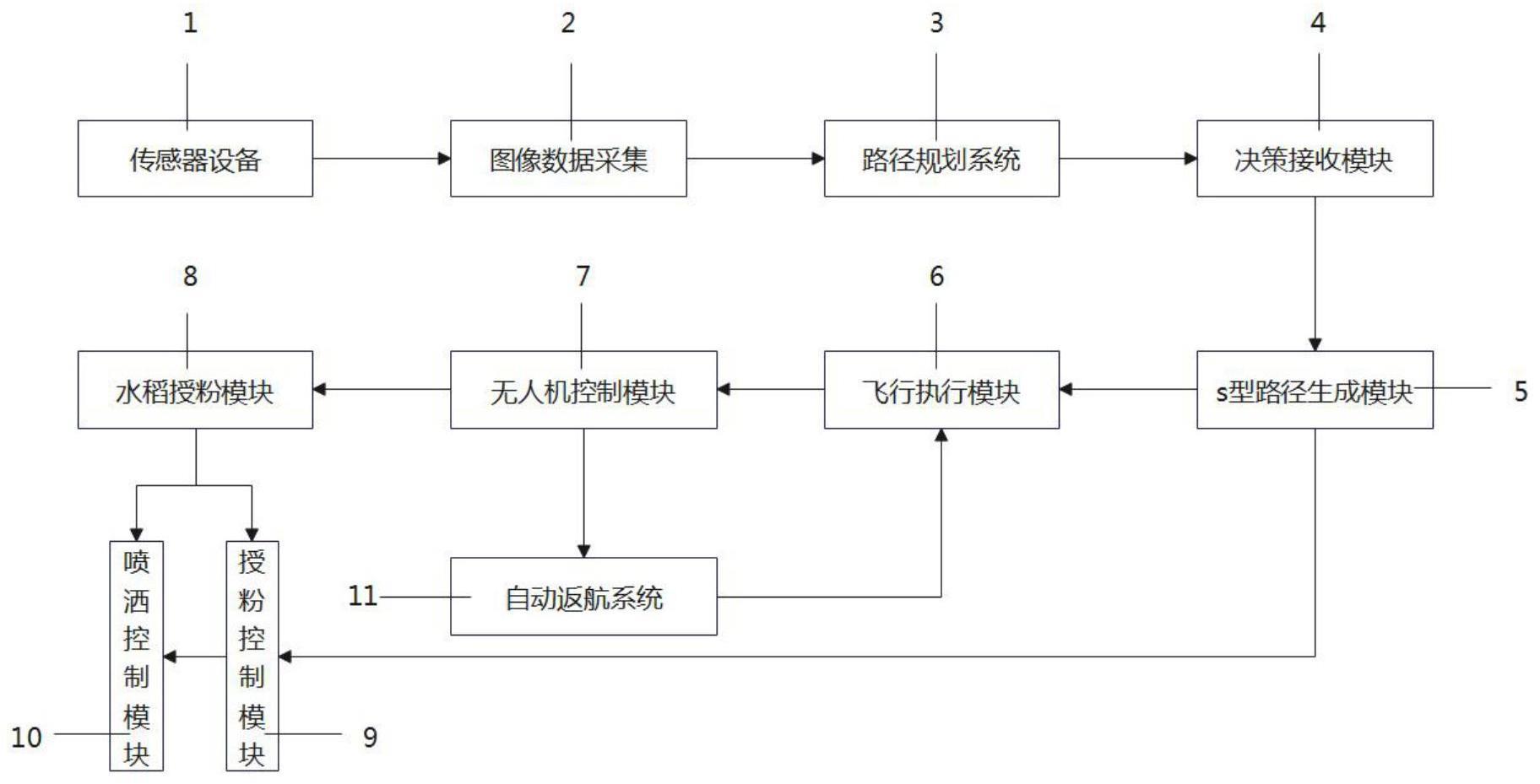
5、首先通过无人机的传感器设备获取水稻父本与无人机之间的距离高度以及父本布局信息,然后再通过图像数据采集模块对水稻父本的实时图像信息进行采集,图像数据采集模块输出端设置有用于对无人机飞行路径规划的路径规划系统,通过路径规划系统基于传感器设备以及图像数据采集模块采集到的信息进行路径数据规划,路径规划系统的数据输出端设置有决策接收模块,决策接收模块用于执行无人机整体飞行过程中的决策支持,路径数据规划完成后将路径数据传输至决策接收模块进行飞行路径的决策生成,决策接收模块的数据输出端设置有s型路径生成模块,s型路径生成模块用于基于规划的路径以及决策生成s型路径相邻父本行返回,决策生成后通过s型路径生成模块将生成的决策将路径数据进行实现以及进行s型路径的飞行路线生成,s型路径生成模块的输出端口设置有飞行执行模块,飞行执行模块用于根据生成的路径信息对无人机下达飞行指令,路径决策实现后通过飞行执行模块向无人机控制模块传输控制指令控制无人机进行预定的路线进行飞行授粉。所述传感器设备上设置了高清摄像头以及距离传感器,通过高清摄像头拍摄稻田的实时场景以及现场环境布局,通过距离传感器来实时感知无人机与水稻之间的距离高度,然后通过图像数据采集模块对高清摄像头拍摄的图像数据进行特征数据采集以及记录,配合距离传感器的实时数据,确定无人机与水稻的相对位置高度以及现场情况,同时记录父本行和母本行的外貌特征,为后续的路径规划和赶粉提供准确的参考。
6、所述路径规划系统采用了prm算法,prm算法是一种通过数据的采样而执行的路径规划算法,它首先通过对采样的数据进行分析,然后根据分析的数据预先构建一组采样点,并通将这些采样点连接,从而生成一个采样图组,然后再使用dijkstra搜索算法在该图上进行最短路径搜索,从而得到最佳的规划路径。
7、所述决策收集模块通过传感器设备、图像采集设备和路径规划系统提供的数据进行决策生成,计算出无人机飞行过程中的决策支持操作,基于采集到的数据和算法,决策收集模块确定最佳飞行路径以及授粉高度,考虑到水稻植株的分布、障碍物的避让和授粉效果,规划无人机的飞行轨迹,以及最佳的授粉开始时间。
8、所述s型路径生成模块是基于路径规划模块的具体飞行方式具现化的功能,生成s型路径可以在无人机在授粉时提供平滑的飞行轨迹,避免了急剧的转弯或改变速度,减少了无人机的加速度和震荡,从而提高了无人机授粉的稳定性和安全性。
9、所述飞行执行模块是一种用于控制无人机执行飞行任务的关键功能模块,飞行执行模块负责执行s型路径生成模块生成的飞行计划以及控制飞行器的飞行姿态。
10、所述无人机控制模块具有处理紧急情况和传感器数据处理的功能,通过无人机控制模块对各个传感器收集到的数据进行处理和分析,从而得到当前的飞行状态,并及时调整飞行参数和控制策略,在出现紧急情况时,无人机控制模块能够及时响应,并在最短时间内采取适当的措施以避免危险的发生,同时无人机控制模块还具有自动返航系统,自动返航系统能够在无人机电量不足时,根据路径规划系统以及s型路径生成模块生成的路线数据计算出剩余电量支持的最佳返回路径,防止无人机电量不足导致无法返回。
11、所述杂交水稻授粉模块包括了授粉控制模块以及喷洒控制模块,授粉控制模块用于根据图像识别模块识别的父本行和母本行控制赶粉开始以及结束的时间,喷洒控制模块用于负责将赤霉素液体喷洒到杂交水稻父母本上,确保杂交水稻授粉成效。
12、有益效果:
13、1、该自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,通过设置了路径规划模块以及s型路径生成模块,通过授粉系统根据收集的稻田数据进行路径决策计算,自动生成最佳的s型飞行路径,让无人机授粉的效率更高的同时还最大化的提升了无人机的飞行利用率,减少无用的飞行路径。
14、2、该自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,通过设置了自动返航系统,在无人机电量低于一定数值时,首先会根据生成的路径线路信息进行路径计算,然后根据剩余电量的最大飞行路程,确保剩余的电量能够顺利返回,提高了无人机授粉过程中的安全性。
技术特征:
1.一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,包括用于获取水稻父本与传感器实时距离高度以及获取水稻父本位置的传感器设备(1);
2.根据权利要求1所述的一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,其特征在于:所述传感器设备(1)上设置了高清摄像头以及距离传感器,通过高清摄像头拍摄稻田的实时场景以及现场环境布局,通过距离传感器来实时感知无人机与水稻之间的距离高度,然后通过图像数据采集模块(2)对高清摄像头拍摄的图像数据进行特征数据采集以及记录,配合距离传感器的实时数据,确定无人机与水稻的相对位置以及现场情况,同时记录父本行和母本行的外貌特征,为后续的路径规划和赶粉提供准确的参考。
3.根据权利要求1所述的一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,其特征在于:所述路径规划系统(3)采用了prm算法,prm算法是一种通过数据的采样而执行的路径规划算法,它首先通过对采样的数据进行分析,然后根据分析的数据预先构建一组采样点,并通将这些采样点连接,从而生成一个采样图组,然后再使用dijkstra搜索算法在该图上进行最短路径搜索,从而得到最佳的规划路径。
4.根据权利要求1所述的一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,其特征在于:所述决策收集模块(4)通过传感器设备(1)、图像采集设备(2)和路径规划系统(3)提供的数据进行决策生成,计算出无人机飞行过程中的决策支持操作,基于采集到的数据和算法,决策收集模块可以确定最佳飞行路径以及授粉高度,考虑到水稻植株的分布、障碍物的避让和授粉效果,规划无人机的飞行轨迹,以及最佳的授粉开始时间。
5.根据权利要求1所述的一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,其特征在于:所述s型路径生成模块(5)是基于路径规划模块(3)的具体飞行方式具现化的功能,生成s型路径可以在无人机在授粉时提供平滑的飞行轨迹,避免了急剧的转弯或改变速度,减少了无人机的加速度和震荡,从而提高了无人机授粉的稳定性和安全性。
6.根据权利要求1所述的一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,其特征在于:所述飞行执行模块(6)是一种用于控制无人机执行飞行任务的关键功能模块,飞行执行模块(6)负责执行s型路径生成模块(5)生成的飞行计划以及控制飞行器的飞行姿态。
7.根据权利要求1所述的一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,其特征在于:所述无人机控制模块(7)具有处理紧急情况和传感器数据处理的功能,通过无人机控制模块(7)对各个传感器收集到的数据进行处理和分析,从而得到当前的飞行状态,并及时调整飞行参数和控制策略,在出现紧急情况时,无人机控制模块(7)能够及时响应,并在最短时间内采取适当的措施以避免危险的发生,同时无人机控制模块(7)还具有自动返航系统(11),自动返航系统(11)能够在无人机电量不足时,根据路径规划系统(3)以及s型路径生成模块(5)生成的路线数据计算出剩余电量支持的最佳返回路径,防止无人机电量不足导致无法返回。
8.根据权利要求1所述的一种自动识别父本和s型路线飞行的大型无人机杂交水稻授粉系统,其特征在于:所述杂交水稻授粉模块(8)包括了授粉控制模块(9)以及喷洒控制模块(10),授粉控制模块(9)用于根据图像识别模块(2)识别的父本行和母本行,控制赶粉开始以及结束时间,喷洒控制模块(10)用于负责将赤霉素液体喷洒到杂交水稻父母本上,确保杂交水稻授粉成效。
技术总结
本发明涉及无人机水稻授粉技术领域,且公开了一种自动识别父本和S型路线飞行的大型无人机杂交水稻授粉系统,首先通过无人机的传感器设备获取水稻与无人机之间的距离高度以及父母本布局信息等,然后再通过图像数据采集模块对杂交水稻制种的父母本高度的不同以及父本行数较少母本行数较多进行识别,识别实时图像信息,然后通过路径规划系统基于传感器设备以及采集到的信息进行路径数据规划(无人机经过父本行,对父本行进行赶粉,即无人机行进路线),路径数据规划完成后将路径数据传输至决策接收模块进行飞行路径的决策生成,路径决策实现后即可通过飞行执行模块向无人机控制模块传输控制指令控制无人机进行预定的路线进行飞行授粉。
技术研发人员:刘怀年,李平,邓其明,王世全,李双成,梁越洋,朱军,邹挺,孙永健,陈荣军,京金花
受保护的技术使用者:四川农业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!