一种防夹持损坏的果蔬采摘机器人
本发明属于采摘机器人,具体为一种防夹持损坏的果蔬采摘机器人。
背景技术:
1、采摘机器人是为了降低劳动强度而诞生的一些工具型机器人,根据专利申请公布号:cn113940197a提出的一种果蔬采摘机器人,该发明涉及机器人领域,公开了一种果蔬采摘机器人,包括行走机构、抓取机构、收集机构和控制模块;行走机构的前方设置识别装置;抓取机构包括机械爪组件和能够驱动机械爪转动、水平方向及竖直方向运动的调节组件;机械爪组件设置在调节组件的运动部件上;控制模块控制行走机构、抓取机构和收集机构进行协同动作;能够进行路况与果实的识别,躲避路障,精准识别果实,且通过调节组件带动机械爪组件进行旋转、升降和平移,能够精准的采摘果实,提升了采摘效率,并实现自动化控制,降低了劳动强度,易于操作,且避免了人工采摘的安全性问题,降低了人工成本,同时自身结构合理紧凑,易于生产,加工成本低,经济性更强。但是目前采摘机器人存在一些问题:1、在采摘的过程中,需要通过机械爪对果蔬进行抓取后,将果蔬撤下,装夹的力度无法控制,容易造成果蔬损坏,影响售卖品质;2、机器人在采摘的过程中将果蔬存储在存储箱的内部,在卸车时,存储箱的深度较深,造成果蔬拿取不便。因此,需要设计一种防夹持损坏的果蔬采摘机器人。
技术实现思路
0、
技术实现要素:
1、本发明的目的就在于为了解决上述问题而提供一种防夹持损坏的果蔬采摘机器人,解决了背景技术中提到的问题。
2、为了解决上述问题,本发明提供了一种防夹持损坏的果蔬采摘机器人技术方案:
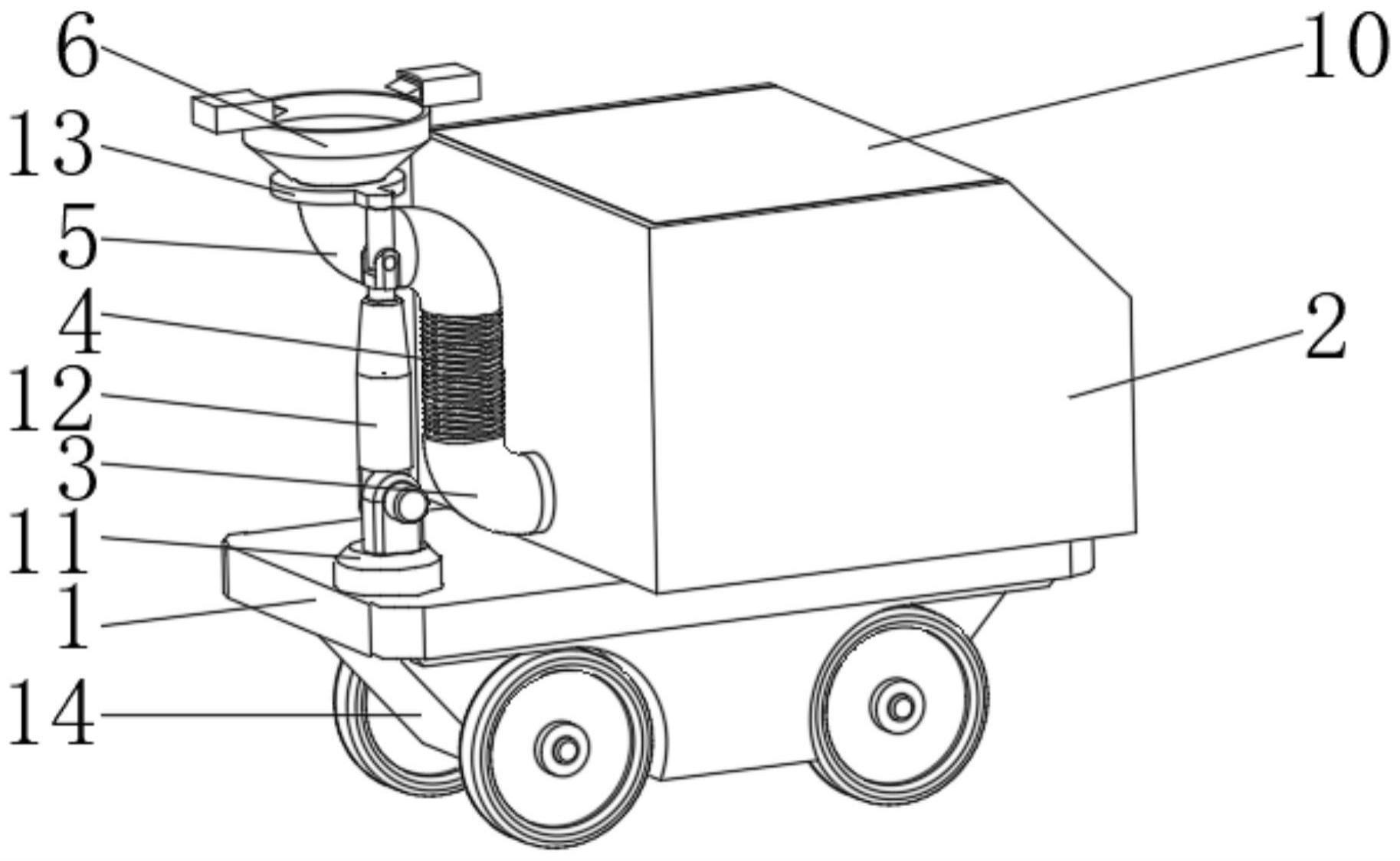
3、一种防夹持损坏的果蔬采摘机器人,包括底板,所述底板上端固定连接有存储箱,所述存储箱上固定连接有单弯管,所述单弯管上固定连接有波纹管,所述波纹管的一端固定连接有缓冲管,所述缓冲管的一端固定连接有进料斗,所述进料斗上设置有切断机构,所述存储箱的内部设置有缓冲机构,所述底板上设置有快开机构,所述存储箱上铰接有箱门,所述底板上设置有机械臂驱动座,所述机械臂驱动座上设置有伸缩臂,所述伸缩臂的输出端上固定连接有连接环,所述连接环与所述进料斗固定连接,所述底板上设置有行动座。
4、作为优选,所述切断机构包括切断盒、电动推杆、固定板、铰接架、切断板、橡胶条、弹性带,所述进料斗上固定连接有两个对分布的切断盒,所述切断盒的内部固定安装有电动推杆,所述电动推杆的输出端上固定连接有固定板,所述固定板上固定连接有铰接架,所述铰接架上铰接有切断板,所述切断板的外侧固定连接有橡胶条,所述固定板上设置有两个对称分布的弹性带,电动推杆带动固定板进行移动,固定板在移动的过程中推动切断板外侧的橡胶条进行移动,当橡胶条与果蔬或者果茎接触时,带动切断板发生偏转,并对一侧的弹性带进行拉伸,橡胶条在偏转的过程中可以对果蔬向下推动,可以避免果蔬被挤压,当两个切断板相互接触时,便可将果蔬的果茎切断。
5、作为优选,所述固定板与所述切断盒滑动连接,所述切断板与所述切断盒滑动连接,切断板可以通过便于处的直角对果茎进行切断。
6、作为优选,所述弹性带的一端与所述固定板固定连接,所述弹性带的另一端与所述切断板固定连接,弹性带可以通过弹力带动切断板自动复位。
7、作为优选,所述缓冲机构包括铰接板、海绵垫、铰接座、支撑管、支撑杆、弹簧一、限位环,所述存储箱的内部铰接有铰接板,所述铰接板的外侧固定连接有海绵垫,所述存储箱的内部铰接有支撑管,所述支撑管的内部滑动连接有支撑杆,所述支撑杆的内部设置有弹簧一,所述铰接板与所述单弯管接触,果蔬掉入到进料斗的内部,然后通过缓冲管、波纹管进入到单弯管的内部,在单弯管的内部滚动时,撞击在铰接板外侧的海绵垫上,并撞击铰接板进行偏转,对果蔬的惯性进行抵消,便可缓慢的滑入到存储箱的内部,铰接板在偏转的过程中可以通过铰接座推动支撑杆沿着支撑管进行滑动,并对弹簧一进行压缩,当果蔬移动过铰接板时,弹簧一复位,弹簧一可以通过弹力带动铰接板自动复位。
8、作为优选,所述弹簧一的一端与所述支撑管固定连接,所述弹簧一的另一端与所述支撑杆固定连接,弹簧一可以通过弹力带动支撑杆自动复位。
9、作为优选,所述支撑管的内部固定连接有限位环,所述限位环与所述支撑杆滑动连接,限位环可以对支撑杆进行限位。
10、作为优选,所述快开机构包括连接架、铰链、翻转板、斜面卡块、弹簧二、拉簧,所述底板的内部滑动连接有连接架,所述连接架的一端固定连接有铰链,所述铰链的外侧交接有翻转板,所述翻转板上固定连接有斜面卡块,所述翻转板与所述底板接触,所述翻转板与所述箱门接触,所述斜面卡块与所述箱门卡接,所述连接架的外侧设置有弹簧二,所述底板的内部设置有拉簧,拉动翻转板,翻转板带动铰链进行移动,并对弹簧二进行压缩,可以增加翻转板的活动范围,并对拉簧进行拉伸,当翻转板上端的斜面卡块脱离箱门时,便可将半包式的箱门打开,可以方便的将存储箱内部的果蔬取出。
11、作为优选,所述拉簧的一端与所述底板固定连接,所述拉簧的另一端与所述翻转板固定连接,拉簧可以通过弹力带动翻转板自动复位。
12、作为优选,所述弹簧二的一端与所述连接架固定连接,所述弹簧二的另一端与所述底板固定连接,弹簧二可以通过弹力带动连接架自动复位。
13、本发明的有益效果是:本发明涉及一种防夹持损坏的果蔬采摘机器人,具有可以防止夹坏果蔬和便于拿取果蔬的特点,在具体的使用中,与传统的果蔬采摘机器人相比较而言,本果蔬采摘机器人具有以下有益效果:
14、首先,通过在进料斗上加设切断机构,采摘的过程中可以通过切断结构将果茎切断,然后果蔬通过缓冲管、波纹管和单弯管滑动到存储箱的内部,从而可以有效的避免将果蔬夹坏,并且在果蔬滚动的过程中可以通过缓冲机构抵消果蔬的惯性,可以有效的避免果蔬损坏。
15、其次,在底板上加设翻转板、斜面卡块和铰链等结构,在需要对存储箱内部的果蔬进行拿取时,可以通过拉动翻转板将斜面卡块脱离半包式的箱门,然后将箱门打开,从而便可方便的对存储箱内部的果蔬进行拿取。
技术特征:
1.一种防夹持损坏的果蔬采摘机器人,包括底板(1),其特征在于:所述底板(1)上端固定连接有存储箱(2),所述存储箱(2)上固定连接有单弯管(3),所述单弯管(3)上固定连接有波纹管(4),所述波纹管(4)的一端固定连接有缓冲管(5),所述缓冲管(5)的一端固定连接有进料斗(6),所述进料斗(6)上设置有切断机构(7),所述存储箱(2)的内部设置有缓冲机构(8),所述底板(1)上设置有快开机构(9),所述存储箱(2)上铰接有箱门(10),所述底板(1)上设置有机械臂驱动座(11),所述机械臂驱动座(11)上设置有伸缩臂(12),所述伸缩臂(12)的输出端上固定连接有连接环(13),所述连接环(13)与所述进料斗(6)固定连接,所述底板(1)上设置有行动座(14)。
2.根据权利要求1所述的一种防夹持损坏的果蔬采摘机器人,其特征在于:所述切断机构(7)包括切断盒(71)、电动推杆(72)、固定板(73)、铰接架(74)、切断板(75)、橡胶条(76)、弹性带(77),所述进料斗(6)上固定连接有两个对分布的切断盒(71),所述切断盒(71)的内部固定安装有电动推杆(72),所述电动推杆(72)的输出端上固定连接有固定板(73),所述固定板(73)上固定连接有铰接架(74),所述铰接架(74)上铰接有切断板(75),所述切断板(75)的外侧固定连接有橡胶条(76),所述固定板(73)上设置有两个对称分布的弹性带(77)。
3.根据权利要求2所述的一种防夹持损坏的果蔬采摘机器人,其特征在于:所述固定板(73)与所述切断盒(71)滑动连接,所述切断板(75)与所述切断盒(71)滑动连接。
4.根据权利要求2所述的一种防夹持损坏的果蔬采摘机器人,其特征在于:所述弹性带(77)的一端与所述固定板(73)固定连接,所述弹性带(77)的另一端与所述切断板(75)固定连接。
5.根据权利要求1所述的一种防夹持损坏的果蔬采摘机器人,其特征在于:所述缓冲机构(8)包括铰接板(81)、海绵垫(82)、铰接座(83)、支撑管(84)、支撑杆(85)、弹簧一(86)、限位环(87),所述存储箱(2)的内部铰接有铰接板(81),所述铰接板(81)的外侧固定连接有海绵垫(82),所述存储箱(2)的内部铰接有支撑管(84),所述支撑管(84)的内部滑动连接有支撑杆(85),所述支撑杆(85)的内部设置有弹簧一(86),所述铰接板(81)与所述单弯管(3)接触。
6.根据权利要求5所述的一种防夹持损坏的果蔬采摘机器人,其特征在于:所述弹簧一(86)的一端与所述支撑管(84)固定连接,所述弹簧一(86)的另一端与所述支撑杆(85)固定连接。
7.根据权利要求5所述的一种防夹持损坏的果蔬采摘机器人,其特征在于:所述支撑管(84)的内部固定连接有限位环(87),所述限位环(87)与所述支撑杆(85)滑动连接。
8.根据权利要求1所述的一种防夹持损坏的果蔬采摘机器人,其特征在于:所述快开机构(9)包括连接架(91)、铰链(92)、翻转板(93)、斜面卡块(94)、弹簧二(95)、拉簧(96),所述底板(1)的内部滑动连接有连接架(91),所述连接架(91)的一端固定连接有铰链(92),所述铰链(92)的外侧交接有翻转板(93),所述翻转板(93)上固定连接有斜面卡块(94),所述翻转板(93)与所述底板(1)接触,所述翻转板(93)与所述箱门(10)接触,所述斜面卡块(94)与所述箱门(10)卡接,所述连接架(91)的外侧设置有弹簧二(95),所述底板(1)的内部设置有拉簧(96)。
9.根据权利要求8所述的一种防夹持损坏的果蔬采摘机器人,其特征在于:所述拉簧(96)的一端与所述底板(1)固定连接,所述拉簧(96)的另一端与所述翻转板(93)固定连接。
10.根据权利要求8所述的一种防夹持损坏的果蔬采摘机器人,其特征在于:所述弹簧二(95)的一端与所述连接架(91)固定连接,所述弹簧二(95)的另一端与所述底板(1)固定连接。
技术总结
本发明公开了一种防夹持损坏的果蔬采摘机器人,包括底板,所述底板上端固定连接有存储箱,所述存储箱上固定连接有单弯管,所述单弯管上固定连接有波纹管,所述波纹管的一端固定连接有缓冲管,所述缓冲管的一端固定连接有进料斗,所述进料斗上设置有切断机构,所述存储箱的内部设置有缓冲机构,所述底板上设置有快开机构,所述存储箱上铰接有箱门,所述底板上设置有机械臂驱动座,所述机械臂驱动座上设置有伸缩臂,所述伸缩臂的输出端上固定连接有连接环,所述连接环与所述进料斗固定连接,所述底板上设置有行动座。本发明涉及一种防夹持损坏的果蔬采摘机器人,具有可以防止夹坏果蔬和便于拿取果蔬的特点。
技术研发人员:崔誉景,钱黎明,郭峰,陈志豪,蒋碧寒,陈世伟,张子衡,单章旭,陈建文
受保护的技术使用者:南通理工学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!