一种智能割草机的制作方法
本申请涉及电器设备领域,尤其涉及一种智能割草机。
背景技术:
1、随着机电技术的不断发展,很多工作都可以使用机电设备来完成。例如草坪维护工作,通过使用可移动的智能割草机可高效完成大面积草坪的维护作业。现如今,一种可自主移动的智能割草机备受关注,其不但能自主进行草坪维护的任务,还能在所需维护的地块上按规划的路径自主移动。
2、为了确保智能割草机自主移动过程中路径的准确,智能割草机在移动时需要能够检测设备体是否被抬起或者被搬动。但是现有的检测装置在一些情况下并不能精准检测,还不利于设计结构更加紧凑的设备体。
技术实现思路
1、鉴于上述问题,提出了本申请以解决上述问题或至少部分地解决上述问题的一种智能割草机。
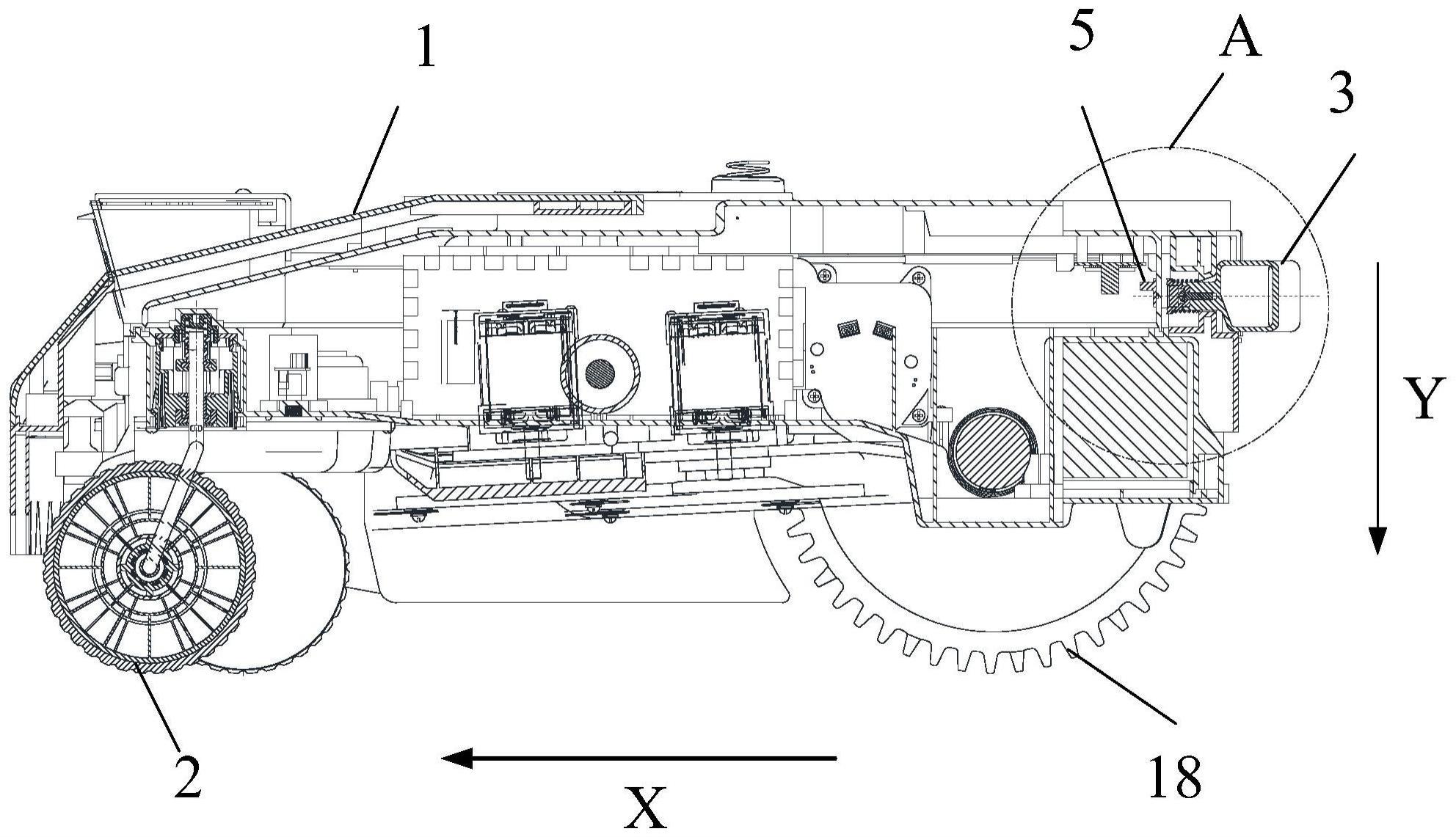
2、在本申请的一个实施例中提供了一种智能割草机,包括:
3、设备体;
4、第一行进轮,设于所述设备体的底部,并能相对于所述设备体浮动;
5、提手,设于所述设备体上;
6、第一传感器,用于监测所述行进轮的浮动;
7、第二传感器,用于监测所述提手的动作;
8、其中,沿所述设备体的行进方向,所述第一行进轮和所述提手中的一个位于所述设备体的前部,另一个位于所述设备体的后部;
9、抬升判断装置,与所述第一传感器和所述第二传感器电性连接,用于接收所述第一传感器和所述第二传感器产生的监测信号,并判断所述设备体被抬升的位置是所述设备体的前部和/或所述设备体的后部。
10、在本申请实施例的技术方案中,沿所述设备体的行进方向,在设备体前部和后部分别设置第一行进轮和提手,且第一行进轮和提手分别对应设置有一个传感器,无论是设备体被整体抬起还是单侧被抬起,都能被传感器精准检测到,从而满足设备体的各种抬升情况的检测,有效提高了设备体在被抬起时的检测精度。另外,通过第一行进轮和提手检测抬起动作,还有利于设计结构更加紧凑的设备体。
技术特征:
1.一种智能割草机,其特征在于,包括:
2.根据权利要求1所述的智能割草机,其特征在于,所述提手具有监测部;
3.根据权利要求2所述的智能割草机,其特征在于,所述第二传感器为霍尔元件,所述第二传感器设置在所述设定位置处;所述提手的监测部处设有磁性件。
4.根据权利要求3所述的智能割草机,其特征在于,所述提手包括:至少部分外露的握持部以及伸入杆;
5.根据权利要求4所述的智能割草机,其特征在于,所述伸入杆的第二端的外周设有止挡凸起;
6.根据权利要求5所述的智能割草机,其特征在于,所述限位通道上壁为斜面。
7.根据权利要求6所述的智能割草机,其特征在于,所述设备上设有壳体,所述壳体包括上盖和下盖,所述上盖和所述下盖扣合形成所述限位通道。
8.根据权利要求5至7任一项所述的智能割草机,其特征在于,还包括弹性件,设于所述提手与所述设备体之间,以在所述提手的所述监测部离开所述设定位置后,提供弹性回复力以使所述监测部回位至所述设定位置。
9.根据权利要求2所述的智能割草机,其特征在于,所述提手包括至少部分外漏的握持部以及旋转件;
10.根据权利要求1所述的智能割草机,其特征在于,所述提手位于所述设备体侧立壁的上部,或位于所述设备体顶面。
11.根据权利要求1所述的智能割草机,其特征在于,还包括:
12.根据权利要求1所述的智能割草机,其特征在于,所述第一行进轮为万向轮;
技术总结
本申请实施例提供了一种智能割草机,包括:设备体;第一行进轮,设于设备体的底部,并能相对于设备体浮动;提手,设于设备体上;第一传感器,用于监测行进轮的浮动;第二传感器,用于监测提手的动作;沿设备体的行进方向,第一行进轮和提手中的一个位于设备体的前部,另一个位于设备体的后部;抬升判断装置,与两个传感器电连接,用于接收两个传感器产生的监测信号,并判断设备体被抬升的位置是设备体的前部和/或设备体的后部。在本申请实施例的技术方案中,在设备体的前部和后部分别设置第一行进轮和提手,且分别对应设置有一个传感器,无论是设备体被整体抬起还是单侧被抬起,都能被传感器精准检测。另外,还有利于设计结构更加紧凑的设备体。
技术研发人员:蒲志高,吴永东
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!