一种协同联合作业单元及多车编组协同作业系统的制作方法
本发明涉及智能协同作业,特别是涉及一种协同联合作业单元及多车编组协同作业系统。
背景技术:
1、我国是农业大国,沙地辽阔,在沙地上种植具备很好的前景,然而沙地地形状况复杂,目前的无人驾驶技术并不能够实现在沙地上使用,这就导致在沙地上种植的人工成本高、效率低,基于此,为了降低人工成本以及提高沙地种植效率,成为目前亟需解决的问题。
技术实现思路
1、本发明的目的是提供一种协同联合作业单元及多车编组协同作业系统,以解决上述现有技术存在的问题,降低人工成本以及提高沙地种植效率。
2、为实现上述目的,本发明提供了如下方案:
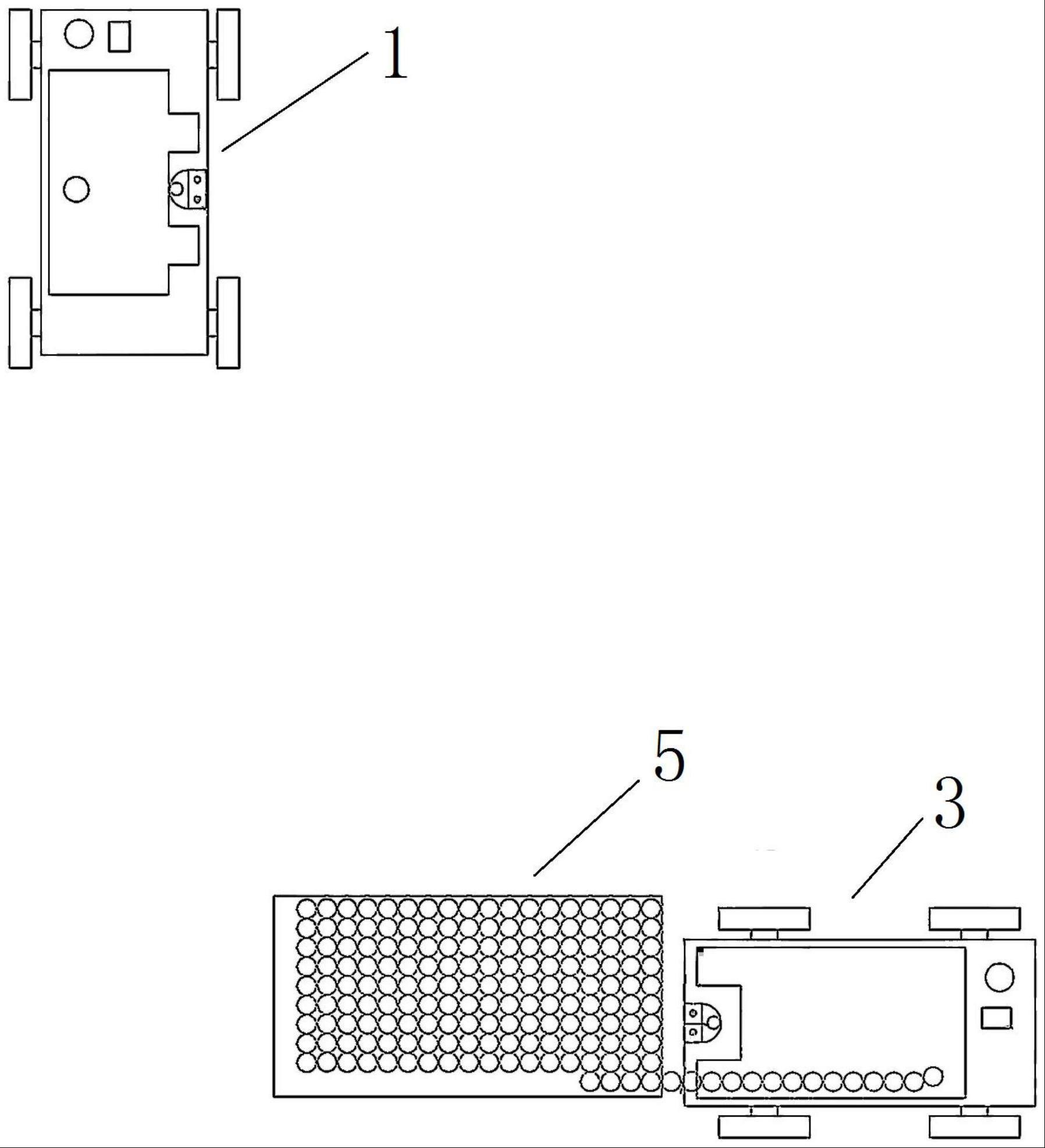
3、本发明提供一种协同联合作业单元,包括作业车、转运车、接驳线、接驳线自动收放装置、倾斜度检测模块和控制器,所述接驳线自动收放装置设置于所述作业车或所述转运车上,所述接驳线的自由端连接于所述转运车或所述作业车上,所述作业车或所述转运车靠近时所述接驳线自动收放装置自动收取所述接驳线,相远离时自动放出所述接驳线,以使得放出的接驳线始终呈直线状态,所述转运车的一侧为卸料侧,所述作业车的一侧为接料侧,所述接驳线垂直于所述卸料侧和所述接料侧时,所述接料侧正对所述卸料侧且相互靠近能够实现对接,所述倾斜度检测模块检测所述接驳线的倾斜度超过所设定的阈值时即传递至所述控制器并使得所述控制器控制所述转运车转向直至倾斜度小于所设定的阈值。
4、优选的,所述倾斜度检测模块包括两个接触传感器,两个所述接触传感器均设置于所述作业车上,且分别位于所述接驳线的两侧,两个所述接触传感器与所述接驳线之间的距离相等,当所述接驳线倾斜至接触任意一侧的所述接触传感器时,所述接触传感器将信号传输至所述控制器,所述控制器控制所述转运车转向直至所述接驳线不与所述接触传感器接触。
5、优选的,所述转运车上设置有自动卸料模块。
6、优选的,所述作业车上设置有作业车视觉系统、作业车载料盘和作业车空满载传感器;所述转运车上设置有转运车视觉系统、转运车载料盘以及转运车空满载传感器;所述作业车载料盘和所述转运车载料盘均用于承载料管,所述作业车空满载传感器能够检测所述作业车载料盘的空载和满载状态,所述转运车空满载传感器能够检测所述转运车载料盘的空载和满载状态;所述作业车空满载传感器和所述转运车空满载传感器均和所述控制器通信连接;当所述作业车载料盘上空载时,所述控制器控制所述转运车向所述作业车行驶;在所述转运车向所述作业车上转运料管时,当所述作业车载料盘上满载时,所述控制器即控制所述作业车根据所述控制器所规划的路径行驶并作业,当所述转运车载料盘空载时,所述控制器控制所述转运车朝向补给点行驶并进行人工装料,当所述转运车载料盘满载时,停止人工装料。
7、优选的,所述接驳线为钢丝。
8、本发明还提供了一种多车编组协同作业系统,包括若干个如上所述的协同联合作业单元和补给点,所述转运车用于将所述补给点处的料管转运至所述作业车上,所述作业车用于自动或半自动进行种植作业。
9、本发明相对于现有技术取得了以下技术效果:
10、本发明提供的协同联合作业单元能够实现作业车、转运车的智能接驳,对补给点的料管进行智能转运,无需人工控制,且对接精度高,因此,本发明提供的方案能够降低人工成本以及提高沙地种植效率。
技术特征:
1.一种协同联合作业单元,其特征在于:包括作业车、转运车、接驳线、接驳线自动收放装置、倾斜度检测模块和控制器,所述接驳线自动收放装置设置于所述作业车或所述转运车上,所述接驳线的自由端连接于所述转运车或所述作业车上,所述作业车或所述转运车靠近时所述接驳线自动收放装置自动收取所述接驳线,相远离时自动放出所述接驳线,以使得放出的接驳线始终呈直线状态,所述转运车的一侧为卸料侧,所述作业车的一侧为接料侧,所述接驳线垂直于所述卸料侧和所述接料侧时,所述接料侧正对所述卸料侧且相互靠近能够实现对接,所述倾斜度检测模块检测所述接驳线的倾斜度超过所设定的阈值时即传递至所述控制器并使得所述控制器控制所述转运车转向直至倾斜度小于所设定的阈值。
2.根据权利要求1所述的协同联合作业单元,其特征在于:所述倾斜度检测模块包括两个接触传感器,两个所述接触传感器均设置于所述作业车上,且分别位于所述接驳线的两侧,两个所述接触传感器与所述接驳线之间的距离相等,当所述接驳线倾斜至接触任意一侧的所述接触传感器时,所述接触传感器将信号传输至所述控制器,所述控制器控制所述转运车转向直至所述接驳线不与所述接触传感器接触。
3.根据权利要求1所述的协同联合作业单元,其特征在于:所述转运车上设置有自动卸料模块。
4.根据权利要求3所述的协同联合作业单元,其特征在于:所述作业车上设置有作业车视觉系统、作业车载料盘和作业车空满载传感器;所述转运车上设置有转运车视觉系统、转运车载料盘以及转运车空满载传感器;所述作业车载料盘和所述转运车载料盘均用于承载料管,所述作业车空满载传感器能够检测所述作业车载料盘的空载和满载状态,所述转运车空满载传感器能够检测所述转运车载料盘的空载和满载状态;所述作业车空满载传感器和所述转运车空满载传感器均和所述控制器通信连接;当所述作业车载料盘上空载时,所述控制器控制所述转运车向所述作业车行驶;在所述转运车向所述作业车上转运料管时,当所述作业车载料盘上满载时,所述控制器即控制所述作业车根据所述控制器所规划的路径行驶并作业,当所述转运车载料盘空载时,所述控制器控制所述转运车朝向补给点行驶并进行人工装料,当所述转运车载料盘满载时,停止人工装料。
5.根据权利要求1所述的协同联合作业单元,其特征在于:所述接驳线为钢丝。
6.一种多车编组协同作业系统,其特征在于:包括若干个权利要求1~5任意一项所述的协同联合作业单元和补给点,所述转运车用于将所述补给点处的料管转运至所述作业车上,所述作业车用于自动或半自动进行种植作业。
技术总结
本发明公开了一种协同联合作业单元及多车编组协同作业系统,涉及智能协同作业技术领域,协同联合作业单元包括作业车、转运车、接驳线、接驳线自动收放装置、倾斜度检测模块和控制器,接驳线自动收放装置设置于作业车或转运车上,接驳线的自由端连接于转运车或作业车上,作业车或转运车靠近时接驳线自动收放装置自动收取接驳线,相远离时自动放出接驳线,以使得放出的接驳线始终呈直线状态,倾斜度检测模块检测接驳线的倾斜度超过所设定的阈值时即传递至控制器并使得控制器控制转运车转向直至倾斜度小于所设定的阈值。本发明还提供了一种多车编组协同作业系统,本发明提供的方案能够降低人工成本以及提高沙地种植效率。
技术研发人员:周天
受保护的技术使用者:内蒙古中航民富科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!