割草机的制作方法
本发明涉及速度控制系统,并且更具体地,涉及用于草地割草机的速度控制系统。
背景技术:
技术实现思路
1、在一方面,本发明提供一种割草机,该割草机包括手柄组件;能够相对于手柄组件移动的握把;可操作以基于握把相对于手柄组件的位置产生输出信号的传感器;驱动组件;以及联接到传感器和驱动组件的控制器。控制器接收输出信号,并根据输出信号控制驱动组件。
2、在另一方面,本发明提供一种割草机,该割草机包括上臂;联接到上臂的横向构件;以及联接到横向构件和上臂的壳体。割草机还包括至少部分地接收在壳体内的握把。握把能够相对于壳体移动。偏置构件使握把偏置,并且该偏置构件至少部分地位于壳体内。传感器位于壳体内,并且传感器基于握把相对于壳体的位置产生控制信号。割草机还包括控制器,该控制器接收控制信号并基于该控制信号操作割草机。
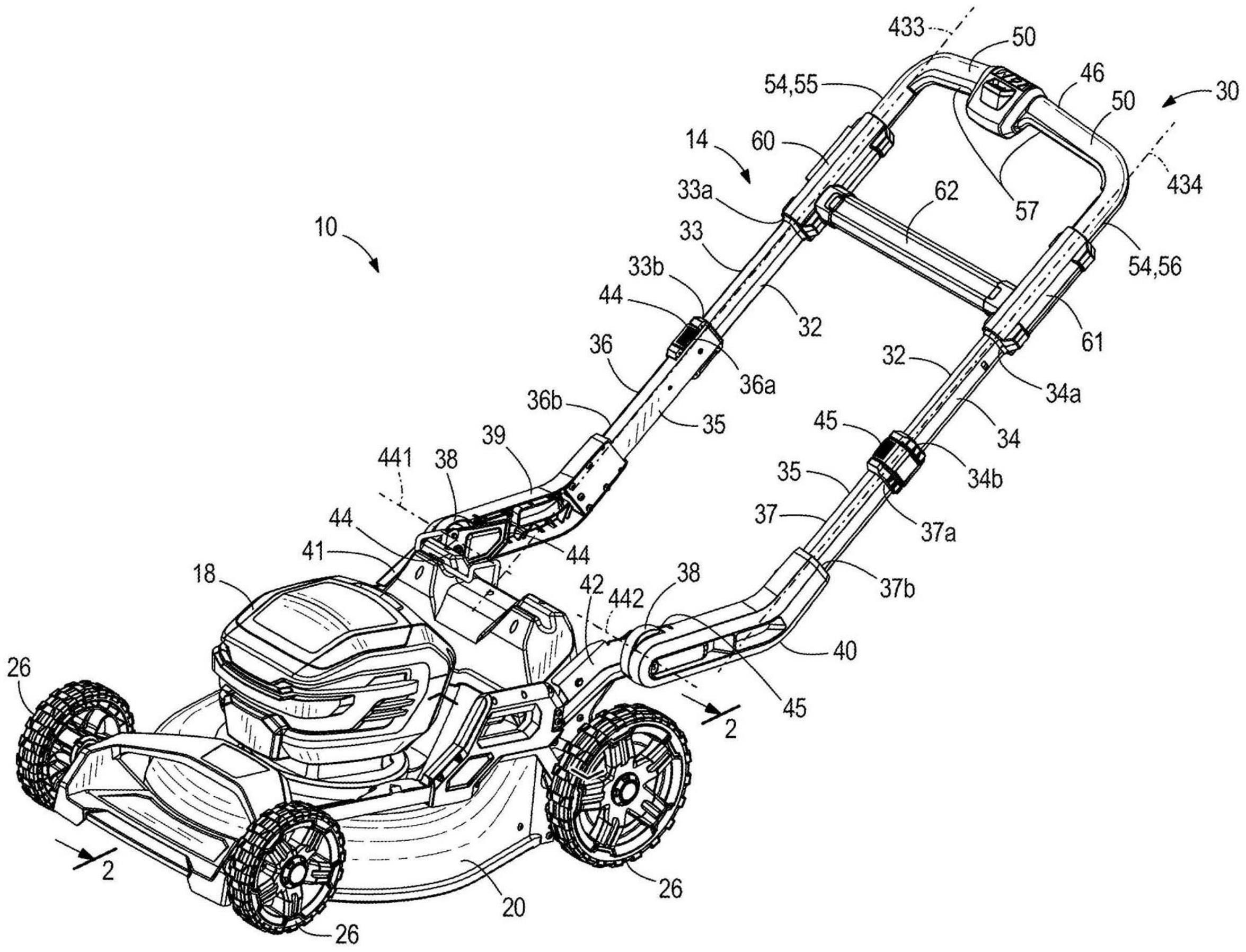
3、在另一方面,本发明提供了一种割草机,该割草机包括:限定手柄枢轴的平台;驱动系统;联接到该平台并且能够绕手柄枢轴相对于平台旋转的手柄构件;联接到手柄构件的下臂;伸缩地联接到下臂的上臂;和速度控制组件。速度控制组件包括联接到上臂的壳体和至少部分地接收在壳体内并且能够相对于上臂移动的握把。速度控制组件还包括位于壳体内的传感器。传感器检测握把相对于上臂的位移并产生控制信号。控制器接收控制信号并基于该控制信号来操作驱动系统。
4、通过考虑以下详细描述和附图,本发明的其他特征和方面将变得显而易见。
技术特征:
1.一种割草机,包括:
2.根据权利要求1所述的割草机,还包括控制器,所述控制器被配置为接收所述输出信号并基于所述输出信号控制所述驱动组件。
3.根据权利要求1所述的割草机,其中,所述传感器选自由以下构成的组中的至少一个:压力传感器和力传感器。
4.根据权利要求1所述的割草机,其中,所述握把包括握持部、第一握把腿和第二握把腿。
5.根据权利要求4所述的割草机,其中,所述第一握把腿和所述第二握把腿由所述手柄组件接收。
6.根据权利要求1所述的割草机,其中,所述手柄组件的该部分平行于所述握把。
7.根据权利要求1所述的割草机,其中,所述输出信号与所述握把相对于所述手柄组件的该部分的位移的大小成比例地变化。
8.根据权利要求1所述的割草机,其中,所述传感器是换能器。
9.根据权利要求1所述的割草机,还包括联接到所述驱动组件的轮,其中,所述驱动组件驱动所述轮。
10.根据权利要求1所述的割草机,其中,所述驱动组件包括电动机。
11.根据权利要求1所述的割草机,其中,所述传感器的第一部分联接到所述握把,并且当所述握把相对于所述手柄组件移动时,所述传感器的第一部分与所述握把一起移动;并且其中,所述传感器的第二部分相对于所述手柄组件固定。
12.根据权利要求1所述的割草机,其中,所述握把沿着所述手柄组件的纵轴平移。
13.根据权利要求1所述的割草机,还包括位于所述握把和所述手柄组件之间的偏置构件。
14.根据权利要求1所述的割草机,还包括旋转地支撑在割草机平台上的切割元件。
15.一种割草机,包括:
16.根据权利要求15所述的割草机,其中,所述传感器是力传感器,所述力传感器可操作以测量用户施加到所述握把的力的量。
17.根据权利要求15所述的割草机,其中,所述手柄组件包括联接到第一壳体的第一上臂和联接到第二壳体的第二上臂,并且所述握把部分地接收在所述第一壳体和所述第二壳体内。
18.根据权利要求17所述的割草机,还包括枢转地联接到支架的下臂,所述支架附接到所述割草机的平台,并且其中,选自由所述第一上臂和所述第二上臂组成的组中的至少一个的下端由所述下臂的上端可伸缩地接收。
19.根据权利要求17所述的割草机,其中,所述握把沿着由选自所述第一上臂和所述第二上臂组成的组中的至少一个限定的纵轴平移。
20.根据权利要求15所述的割草机,还包括控制器,所述控制器被配置为接收所述输出信号,并且基于所述输出信号控制所述驱动组件。
技术总结
一种割草机,包括:手柄组件;能够相对于手柄组件移动的握把;可操作以基于握把相对于手柄组件的位置产生输出信号的传感器;驱动组件;以及联接到传感器和驱动组件的控制器。控制器接收输出信号,并根据输出信号控制驱动组件。
技术研发人员:J·C·费雷尔,W·E·科尔伯,D·冯
受保护的技术使用者:创科(澳门离岸商业服务)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!