一种荔枝采摘机器人系统的制作方法
本发明涉及一种机器人,具体涉及一种荔枝采摘机器人系统。
背景技术:
1、中国是荔枝的原产地,是荔枝产业第一大国,拥有全球丰富、优质的荔枝品种。荔枝在历史上有“百果之王”等美称,是中国文化底蕴最为深厚的果品之一。荔枝树通常不会超过10米,矮化过后一般在3~5米;荔枝的花期在3~4月,果期在5~8月;市场需求稳定,收益客观。目前市面上采用的是人工采摘的方法,人工采摘时费时费力,部分荔枝树长的较高,人工采摘存在风险,需要一种机器人替代人工来采摘荔枝。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种荔枝采摘机器人系统。
2、本发明的技术方案如下:
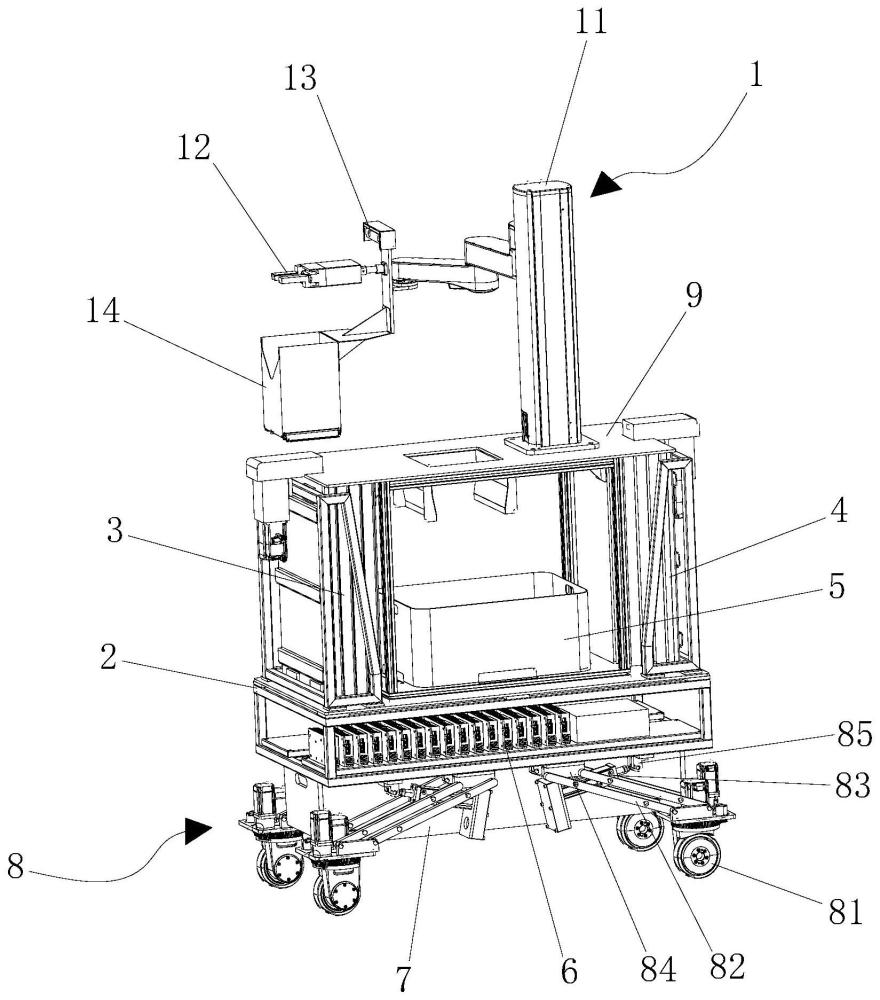
3、一种荔枝采摘机器人系统,包括采摘机器手、机器人骨架、第一机器手升降组件、第二机器手升降组件、果筐、电控组件、电池仓和舵轮组件,所述舵轮组件和电池仓设置在机器人骨架的底部,所述电控组件设置在机器人骨架内与电池仓电性连接,所述第一机器手升降组件和第二机器手升降组件左右相对设置在机器人骨架上与电控组件电性连接,所述采摘机器手通过一承载板设置在第一机器手升降组件和第二机器手升降组件上,所述果筐放置于机器人骨架上且位于第一机器手升降组件与第二机器手升降组件之间。
4、进一步的,所述第一机器手升降组件和第二机器手升降组件的结构相同,均包括升降电机、齿轮传动结构、丝杆模组、固定板、内侧立式升降板、外侧立式升降板、同步传动结构和支撑连接架,所述丝杆模组设置在固定板上,所述升降电机通过齿轮传动结构与丝杆模组传动连接,所述固定板的前后两侧设有第一升降导轨,所述内侧立式升降板活动设置在第一升降导轨上与丝杆模组传动连接,所述内侧立式升降板的前后两侧设有第二升降导轨,所述外侧立式升降板活动设置在第二升降导轨上,所述外侧立式升降板与内侧立式升降板之间通过同步传动结构传动连接,所述外侧立式升降板的上端通过支撑连接架与承载板连接。
5、进一步的,所述内侧立式升降板并列设有若干块,第一块内侧立式升降板活动设置在第一升降导轨上与丝杆模组传动连接,下一块内侧立式升降板活动设置在上一块内侧立式升降板的第二升降导轨上,相邻两块内侧立式升降板之间通过同步传动结构传动连接。
6、进一步的,所述舵轮组件包括四个舵轮和四个舵轮升降组件,每个舵轮通过一舵轮升降组件与机器人骨架连接。
7、进一步的,所述舵轮升降组件包括连动杆、升降气缸、第一枢转座和第二枢转座,所述第一枢转座和第二枢转座相对设置在机器人骨架的底部,所述连动杆的一端部与第一枢转座转动连接,所述连动杆的另一端部与舵轮转动连接,所述连动杆的中部与升降气缸的缸体转动连接,所述升降气缸的缸轴与第二枢转座转动连接。
8、进一步的,所述采摘机器手包括四轴机器臂、剪刀组件、双目相机和果实缓存仓,所述剪刀组件设置在四轴机器臂的自由端,所述双目相机和果实缓存仓上下设置在剪刀组件上。
9、相对于现有技术,本发明的有益效果在于:
10、本发明提供的荔枝采摘机器人系统可代替人工实现荔枝采摘,通过左右两个机器手升降组件可驱动顶部的采摘机器手升降,通过采摘机器手进行视觉采摘,最高可采摘到3.8米的荔枝树果实,避免了人工高空采摘的风险,且其底部舵轮组件的结构设计可适用于20°以内的斜坡,通过舵轮升降组件调节机器人到水平,作业稳定性高。
技术特征:
1.一种荔枝采摘机器人系统,其特征在于:包括采摘机器手、机器人骨架、第一机器手升降组件、第二机器手升降组件、果筐、电控组件、电池仓和舵轮组件,所述舵轮组件和电池仓设置在机器人骨架的底部,所述电控组件设置在机器人骨架内与电池仓电性连接,所述第一机器手升降组件和第二机器手升降组件左右相对设置在机器人骨架上与电控组件电性连接,所述采摘机器手通过一承载板设置在第一机器手升降组件和第二机器手升降组件上,所述果筐放置于机器人骨架上且位于第一机器手升降组件与第二机器手升降组件之间。
2.根据权利要求1所述的一种荔枝采摘机器人系统,其特征在于:所述第一机器手升降组件和第二机器手升降组件的结构相同,均包括升降电机、齿轮传动结构、丝杆模组、固定板、内侧立式升降板、外侧立式升降板、同步传动结构和支撑连接架,所述丝杆模组设置在固定板上,所述升降电机通过齿轮传动结构与丝杆模组传动连接,所述固定板的前后两侧设有第一升降导轨,所述内侧立式升降板活动设置在第一升降导轨上与丝杆模组传动连接,所述内侧立式升降板的前后两侧设有第二升降导轨,所述外侧立式升降板活动设置在第二升降导轨上,所述外侧立式升降板与内侧立式升降板之间通过同步传动结构传动连接,所述外侧立式升降板的上端通过支撑连接架与承载板连接。
3.根据权利要求2所述的一种荔枝采摘机器人系统,其特征在于:所述内侧立式升降板并列设有若干块,第一块内侧立式升降板活动设置在第一升降导轨上与丝杆模组传动连接,下一块内侧立式升降板活动设置在上一块内侧立式升降板的第二升降导轨上,相邻两块内侧立式升降板之间通过同步传动结构传动连接。
4.根据权利要求1所述的一种荔枝采摘机器人系统,其特征在于:所述舵轮组件包括四个舵轮和四个舵轮升降组件,每个舵轮通过一舵轮升降组件与机器人骨架连接。
5.根据权利要求4所述的一种荔枝采摘机器人系统,其特征在于:所述舵轮升降组件包括连动杆、升降气缸、第一枢转座和第二枢转座,所述第一枢转座和第二枢转座相对设置在机器人骨架的底部,所述连动杆的一端部与第一枢转座转动连接,所述连动杆的另一端部与舵轮转动连接,所述连动杆的中部与升降气缸的缸体转动连接,所述升降气缸的缸轴与第二枢转座转动连接。
6.根据权利要求1所述的一种荔枝采摘机器人系统,其特征在于:所述采摘机器手包括四轴机器臂、剪刀组件、双目相机和果实缓存仓,所述剪刀组件设置在四轴机器臂的自由端,所述双目相机和果实缓存仓上下设置在剪刀组件上。
技术总结
本发明公开一种荔枝采摘机器人系统,包括采摘机器手、机器人骨架、第一机器手升降组件、第二机器手升降组件、果筐、电控组件、电池仓和舵轮组件,舵轮组件和电池仓设置在机器人骨架的底部,电控组件设置在机器人骨架内与电池仓电性连接,第一机器手升降组件和第二机器手升降组件左右相对设置在机器人骨架上与电控组件电性连接,采摘机器手通过一承载板设置在第一机器手升降组件和第二机器手升降组件上,果筐放置于机器人骨架上且位于第一机器手升降组件与第二机器手升降组件之间。本发明可代替人工实现荔枝采摘,最高可采摘到3.8米的荔枝树果实,避免了人工高空采摘的风险,该荔枝采摘机器人系统可适用于20°以内的斜坡,作业稳定性高。
技术研发人员:李兰云,黄华东,罗东玮,陈观海,关宗梁,邹光富
受保护的技术使用者:广东若铂智能机器人有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!