一种宠物喂养机控制方法、控制系统和宠物喂养机与流程
本申请涉及宠物喂养机,具体涉及一种宠物喂养机控制方法、控制系统和宠物喂养机。
背景技术:
1、随着居民生活水平的不断提升,越来越多的家庭选择饲养宠物,市场上也出现了不少可以帮助主人喂养宠物的智能喂养机。智能喂养机的主要功能是可以给宠物提供饮用水和食物,并且还具有统计宠物的饮食量和记录宠物饮食状态的功能。当前市面上的宠物喂养机通过称重传感器称量水的重量,以此统计宠物的饮食量。然而,称重传感器仅具有此作用,没有进行复用,功能较为单一。
技术实现思路
1、本申请提供了一种宠物喂养机控制方法、控制系统和宠物喂养机,具体技术方案如下:
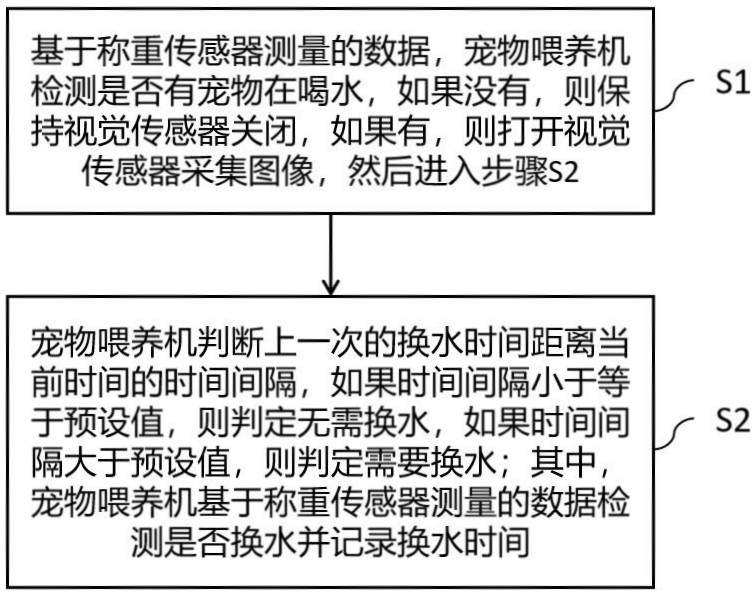
2、一种宠物喂养机控制方法,所述宠物喂养机控制方法包括:步骤s1,基于称重传感器测量的数据,宠物喂养机检测是否有宠物在喝水,如果没有,则保持视觉传感器关闭,如果有,则打开视觉传感器采集图像,然后进入步骤s2;步骤s2,宠物喂养机判断上一次的换水时间距离当前时间的时间间隔,如果时间间隔小于等于预设值,则判定无需换水,如果时间间隔大于预设值,则判定需要换水;其中,宠物喂养机基于称重传感器测量的数据检测是否换水并记录换水时间。
3、进一步地,所述步骤s1中,基于称重传感器测量的数据,宠物喂养机检测是否有宠物在喝水的方法包括:步骤s11,当宠物喂养机通过称重传感器测量的数据检测到重量减小时,判断减小值是否在预设范围内,如果否,则判定没有宠物在喝水,如果是,则进入步骤s12;步骤s12,宠物喂养机判断重量是否在预设时间内持续减小并且减小值在预设范围内,如果否,则判定没有宠物在喝水,如果是,则判定有宠物在喝水。
4、进一步地,所述步骤s11中,当宠物喂养机通过称重传感器测量的数据检测到重量减小时,如果判断减小值在预设范围内,则打开视觉传感器采集图像,然后继续检测是否有宠物在喝水,如果判定有宠物在喝水,则继续采集图像,如果判定没有宠物在喝水,则将采集的图像删除并关闭视觉传感器。
5、进一步地,当宠物喂养机判定有宠物在喝水,打开视觉传感器采集图像的过程中,基于称重传感器测量的数据,宠物喂养机判断重量是否在预设时间范围内保持不变,如果否,则判定宠物仍在喝水,如果是,则判定宠物停止喝水并关闭视觉传感器。
6、进一步地,所述步骤s2中,宠物喂养机基于称重传感器测量的数据检测是否换水并记录换水时间的方法包括:步骤s21,当宠物喂养机通过称重传感器测量的数据检测到重量减小后,判断减小值是否超过蓄水容器的重量,如果否,则判定为非换水状态,如果是,则判定为换水状态,然后进入步骤s22;步骤s22,宠物喂养机持续检测,当重量增大且增大值超过蓄水容器的重量时,判定换水完成,同时将换水完成的时间记录为换水时间。
7、进一步地,所述宠物喂养机打开视觉传感器采集图像时或者判定需要换水时,将采集的图像或者判定结果传输给智能终端。
8、进一步地,所述宠物喂养机控制方法还包括:步骤s3,基于称重传感器测量的数据,在宠物喂养机的一个使用周期中,每隔预设时间间隔设置一个时间戳,并且记录每一个时间戳所对应的重量数据;步骤s4,在使用周期中,找出突变数据并删除,然后基于相邻数据的差值计算校准系数;步骤s5,基于校准系数和使用周期的预估宠物饮水量,计算获得实际宠物饮水量。
9、进一步地,所述步骤s4中,找出突变数据的方法包括:步骤s41,在使用周期内,将饮水时间段所涉及的时间戳所对应的重量数据标记为第一突变数据;步骤s42,以第一突变数据为分界,将使用周期分割成若干个第一时间块,第一时间块中不包括第一突变数据;步骤s43,分别针对每个第一时间块,通过平均绝对偏差法找出每个第一时间块中的异常值,将所有异常值标记为第二突变数据;其中,突变数据包括第一突变数据和第二突变数据。
10、进一步地,所述步骤s41中,获取饮水时间段的方法包括:步骤s411,当宠物喂养机检测到重量减小后,判断减小值是否在预设重量范围内,如果是,则判定宠物正在饮水,同时将此时的时间戳标记为起始饮水时间戳;步骤s412,宠物喂养机持续检测,当重量在预设时间范围内保持不变时,判定宠物停止饮水,同时将此时的时间戳标记为结束饮水时间戳;其中,饮水时间段即从起始饮水时间戳到结束饮水时间戳之间的时间段。
11、进一步地,所述步骤s4中,基于相邻数据的差值计算校准系数的方法包括:步骤s44,以突变数据为分界,将使用周期分割成若干个第二时间块,第二时间块中不包括突变数据;步骤s45,分别针对每个第二时间块,计算相邻数据的差值的绝对值并求均值,获得每个第二时间块对应的校准系数。
12、进一步地,所述步骤s5中,基于校准系数和使用周期内的预估宠物饮水量,计算获得实际宠物饮水量的方法包括:步骤s51,分别将每个第二时间块所涉及的时间戳的个数与每个第二时间块对应的校准系数相乘,获得每个第二时间块对应的校准值;步骤s52,将每个第二时间块对应的校准值相加,获得总校准值;步骤s53,将使用周期内的预估宠物饮水量减去总校准值,获得实际宠物饮水量。
13、进一步地,所述步骤s53中,获取使用周期内的预估宠物饮水量的方法包括:步骤s531,记录使用周期起始时间戳所对应的重量数据并标记为起始重量;步骤s532,记录使用周期结束时间戳所对应的重量数据并标记为结束重量;步骤s533,将起始重量减去结束重量,获得使用周期内的预估宠物饮水量。
14、一种宠物喂养机,所述宠物喂养机用于实现所述宠物喂养机控制方法。
15、一种宠物喂养机控制系统,所述宠物喂养机控制系统包括所述宠物喂养机,还包括智能终端,该智能终端用于接收和显示宠物喂养机传输的数据。
16、本申请所述的宠物喂养机控制方法,除了常规的称量饮用水重量的功能外,宠物喂养机还可以利用称重传感器检测宠物是否喝水以及检测是否换水,提高了称重传感器的利用率,使得宠物喂养机在不增加新硬件结构的前提下可以实现更多的功能,缩短了产品开发周期,大大降低了宠物喂养机的成本。
技术特征:
1.一种宠物喂养机控制方法,其特征在于,所述宠物喂养机控制方法包括:
2.根据权利要求1所述的一种宠物喂养机控制方法,其特征在于,所述步骤s1中,基于称重传感器测量的数据,宠物喂养机检测是否有宠物在喝水的方法包括:
3.根据权利要求2所述的一种宠物喂养机控制方法,其特征在于,所述步骤s11中,当宠物喂养机通过称重传感器测量的数据检测到重量减小时,如果判断减小值在预设范围内,则打开视觉传感器采集图像,然后继续检测是否有宠物在喝水,如果判定有宠物在喝水,则继续采集图像,如果判定没有宠物在喝水,则将采集的图像删除并关闭视觉传感器。
4.根据权利要求3所述的一种宠物喂养机控制方法,其特征在于,当宠物喂养机判定有宠物在喝水,打开视觉传感器采集图像的过程中,基于称重传感器测量的数据,宠物喂养机判断重量是否在预设时间范围内保持不变,如果否,则判定宠物仍在喝水,如果是,则判定宠物停止喝水并关闭视觉传感器。
5.根据权利要求1所述的一种宠物喂养机控制方法,其特征在于,所述步骤s2中,宠物喂养机基于称重传感器测量的数据检测是否换水并记录换水时间的方法包括:
6.根据权利要求1所述的一种宠物喂养机控制方法,其特征在于,所述宠物喂养机打开视觉传感器采集图像时或者判定需要换水时,将采集的图像或者判定结果传输给智能终端。
7.根据权利要求1所述的一种宠物喂养机控制方法,其特征在于,所述宠物喂养机控制方法还包括:
8.根据权利要求7所述的一种宠物喂养机控制方法,其特征在于,所述步骤s4中,找出突变数据的方法包括:
9.根据权利要求8所述的一种宠物喂养机控制方法,其特征在于,所述步骤s41中,获取饮水时间段的方法包括:
10.根据权利要求8所述的一种宠物喂养机控制方法,其特征在于,所述步骤s4中,基于相邻数据的差值计算校准系数的方法包括:
11.根据权利要求10所述的一种宠物喂养机控制方法,其特征在于,所述步骤s5中,基于校准系数和使用周期内的预估宠物饮水量,计算获得实际宠物饮水量的方法包括:
12.根据权利要求11所述的一种宠物喂养机控制方法,其特征在于,所述步骤s53中,获取使用周期内的预估宠物饮水量的方法包括:
13.一种宠物喂养机,其特征在于,所述宠物喂养机用于实现权利要求1至12任一项所述宠物喂养机控制方法。
14.一种宠物喂养机控制系统,其特征在于,所述宠物喂养机控制系统包括权利要求13所述宠物喂养机,还包括智能终端,该智能终端用于接收和显示宠物喂养机传输的数据。
技术总结
本申请提供了一种宠物喂养机控制方法、控制系统和宠物喂养机,所述宠物喂养机控制方法包括:步骤S1,基于称重传感器测量的数据,宠物喂养机检测是否有宠物在喝水,如果没有,则保持视觉传感器关闭,如果有,则打开视觉传感器采集图像,然后进入步骤S2;步骤S2,宠物喂养机判断上一次的换水时间距离当前时间的时间间隔,如果时间间隔小于等于预设值,则判定无需换水,如果时间间隔大于预设值,则判定需要换水;其中,宠物喂养机基于称重传感器测量的数据检测是否换水并记录换水时间。所述宠物喂养机控制方法提高了称重传感器的利用率,使得宠物喂养机在不增加新硬件结构的前提下可以实现更多的功能,缩短了产品开发周期,大大降低了宠物喂养机的成本。
技术研发人员:周泳闯,金儒彬,李国辉,曾雅珊,姜新桥
受保护的技术使用者:珠海市一微机器人技术有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!