履带式大蒜联合收获机的制作方法
本发明涉及大蒜收获设备,特别涉及履带式大蒜联合收获机。
背景技术:
1、目前国内大蒜收获设备主要有分段条铺式大蒜收获机和大蒜联合收获机。分段条铺式大蒜收获机具有结构简单,成本低的优点,但是自动化程度低,后期大蒜收集、切秧、切根都需要人工完成。现有大蒜联合收获机虽然能一次完成挖掘、去土、夹持输送、切秧及蒜头收集等作业,但仍存在许多缺点。
2、如申请号为2020100392817所公开的一种四行履带自走式大蒜联合收获机,包括机架、振动挖掘装置、履带行走装置、大蒜切割装置等结构,虽然其能够对大蒜进行切割收获,但由于大蒜的个体差异不同,大蒜秧的长短和大蒜头的位置存在差异,导致其对大蒜的秧和根须的切割适应能力较差,难以较为精准的进行根须切割。
技术实现思路
1、本发明提供履带式大蒜联合收获机,能够对大蒜的根须进行切割,至少解决上述现有技术存在的部分问题。
2、为了实现上述目的,本发明采用的技术方案为:
3、履带式大蒜联合收获机,包括:
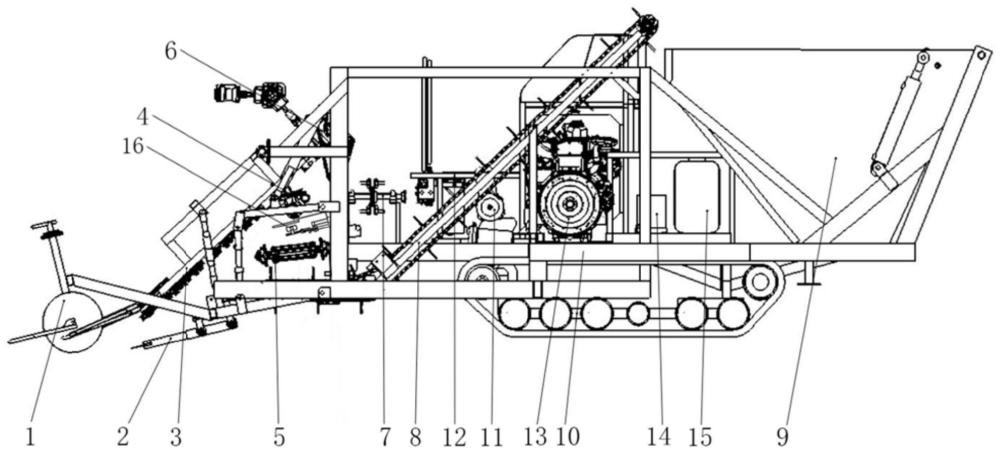
4、底盘,底盘上设置有行走机构和动力系统;
5、底盘前端的机架上设置有用于将大蒜从土中掘出的掘取刀机构和用于输送并切割大蒜的大蒜夹持切割机构,大蒜夹持切割机构包括夹持机构、用于切割蒜秧的切刀机构和用于切割根须的切须机构,夹持机构的末端设置有排秧机构和排秧输送机构,切须机构下方设置有蒜头输送机构;
6、底盘上设置有与蒜头输送机构的出料端连接的蒜头提升机构,蒜头提升机构能够将蒜头输送到底盘上的仓斗中。
7、优选地,夹持机构包括设置在机架上的安装轴和固定在安装轴上的夹持框,夹持框上固定有若干个平行的伸缩管和转动安装在伸缩管两端的夹持前轮和夹持后轮,夹持前轮和夹持后轮上绕有夹持皮带,机架上设置有用于驱动夹持皮带循环转动的驱动机构。
8、优选地,切须机构包括整齐板、设置在整齐板下方的若干个切须单元,整齐板与夹持皮带存在一夹角,整齐板上开设有若干个与夹持皮带配合的限位槽,切须单元设置在限位槽下方。
9、优选地,切须机构还包括与夹持机构固定连接的固定架,整齐板与固定架固定连接,切须单元包括设置在固定架上的两个刀架以及分别设置在两个刀架上的上环刀和下环刀,当两个刀架相向移动时,上环刀和下环刀配合切断蒜头根须。
10、优选地,两个刀架上均活动插接有滑杆,两个滑杆相对的一端均设置有夹持部,夹持部位于上环刀和整齐板之间,滑杆位于刀架远离夹持部的一端设置有限位头,滑杆位于夹持部和刀架之间的部分套接有弹簧。
11、优选地,夹持部的内表面为弧形面。
12、优选地,切须单元还包括固定在固定架上的导向杆和固定在导向杆端部的导轨,导轨与导向杆垂直,导向杆上套接有滑套,导轨的两端对称滑动安装有滑块,滑块上铰接有连杆,连杆远离滑块的一端与滑套铰接,两个刀架分别固定在两个滑块上。
13、优选地,固定架上设置有气缸,气缸远离固定架的一端设置有限位杆,滑套与限位杆固定连接。
14、优选地,伸缩管包括夹持方管和夹持芯管,夹持方管上设置有用于调节夹持芯管伸出距离的皮带张紧器,夹持方管上固定有用于抵住夹持皮带的压紧轮。
15、优选地,切刀机构包括固定芯管和若干个套接在固定芯管上的固定套管,固定套管上设置有固定板,固定板上设置有定刀以及换向器,换向器的输出端连接有切秧刀,换向器的输入端连接有切刀驱动轴。
16、与现有技术对比,本发明的有益效果为:
17、1、通过设置大蒜夹持切割机构,掘取刀机构挖上来的大蒜的蒜秧被夹持机构夹住,而后输送到切刀机构和切须机构进行切须和切秧,大蒜头经蒜头输送机构和蒜头提升机构输送到仓斗中,完成收集,收获大蒜的效率高,使用蒜头提成机构可以将蒜头输送到高处,这样可以安装更大更高的仓斗,延长大蒜收获机的工作时间;经切须机构精确切须后的大蒜,残留根须极少,大蒜品相好;
18、2、通过设置整齐板、夹持部、上环刀和下环刀,整齐板可初次对齐大蒜头的顶部,夹持部的内壁为弧形部,可在夹持大蒜头的过程中再次对大蒜头进行整齐,使得大蒜头的根须更加贴合上环刀的位置,上环刀和下环刀可拢住大蒜头的根须,切割更为彻底。
技术特征:
1.履带式大蒜联合收获机,其特征在于,包括:
2.如权利要求1所述的履带式大蒜联合收获机,其特征在于,所述夹持机构(3)包括设置在机架上的安装轴(32)和固定在安装轴(32)上的夹持框(31),所述夹持框(31)上固定有若干个平行的伸缩管和转动安装在伸缩管两端的夹持前轮(36)和夹持后轮(37),所述夹持前轮(36)和夹持后轮(37)上绕有夹持皮带(38),所述机架上设置有用于驱动夹持皮带(38)循环转动的驱动机构。
3.如权利要求1所述的履带式大蒜联合收获机,其特征在于,所述切须机构(16)包括整齐板(161)、设置在整齐板(161)下方的若干个切须单元,所述整齐板(161)与夹持皮带(38)存在一夹角,所述整齐板(161)上开设有若干个与夹持皮带(38)配合的限位槽(163),所述切须单元设置在限位槽(163)下方。
4.如权利要求3所述的履带式大蒜联合收获机,其特征在于,所述切须机构(16)还包括与夹持机构(3)固定连接的固定架(162),所述整齐板(161)与固定架(162)固定连接,所述切须单元包括设置在固定架(162)上的两个刀架(1611)以及分别设置在两个刀架(1611)上的上环刀(1612)和下环刀(1613),当两个所述刀架(1611)相向移动时,所述上环刀(1612)和下环刀(1613)配合切断蒜头根须。
5.如权利要求4所述的履带式大蒜联合收获机,其特征在于,两个所述刀架(1611)上均活动插接有滑杆(1614),两个所述滑杆(1614)相对的一端均设置有夹持部(1616),所述夹持部(1616)位于上环刀(1612)和整齐板(161)之间,所述滑杆(1614)位于刀架(1611)远离夹持部(1616)的一端设置有限位头(1615),所述滑杆(1614)位于夹持部(1616)和刀架(1611)之间的部分套接有弹簧(1617)。
6.如权利要求5所述的履带式大蒜联合收获机,其特征在于,所述夹持部(1616)的内表面为弧形面。
7.如权利要求4所述的履带式大蒜联合收获机,其特征在于,所述切须单元还包括固定在固定架(162)上的导向杆(164)和固定在导向杆(164)端部的导轨(165),所述导轨(165)与导向杆(164)垂直,所述导向杆(164)上套接有滑套(167),所述导轨(165)的两端对称滑动安装有滑块(166),所述滑块(166)上铰接有连杆(168),所述连杆(168)远离滑块(166)的一端与滑套(167)铰接,两个所述刀架(1611)分别固定在两个滑块(166)上。
8.如权利要求7所述的履带式大蒜联合收获机,其特征在于,所述固定架(162)上设置有气缸(169),所述气缸(169)远离固定架(162)的一端设置有限位杆(1610),所述滑套(167)与限位杆(1610)固定连接。
9.如权利要求2所述的履带式大蒜联合收获机,其特征在于,所述伸缩管包括夹持方管(33)和夹持芯管(34),所述夹持方管(33)上设置有用于调节夹持芯管(34)伸出距离的皮带张紧器(35),所述夹持方管(33)上固定有用于抵住夹持皮带(38)的压紧轮(310)。
10.如权利要求1所述的履带式大蒜联合收获机,其特征在于,所述切刀机构(4)包括固定芯管(47)和若干个套接在固定芯管(47)上的固定套管(45),所述固定套管(45)上设置有固定板(46),所述固定板(46)上设置有定刀(43)以及换向器,所述换向器的输出端连接有切秧刀(42),所述换向器的输入端连接有切刀驱动轴(44)。
技术总结
本发明公开了履带式大蒜联合收获机,涉及大蒜收获设备技术领域,包括底盘,底盘上设置有行走机构和动力系统;底盘的机架上设置有掘取刀机构和大蒜夹持切割机构,大蒜夹持切割机构包括夹持机构、切刀机构和切须机构,切须机构下方设置有蒜头输送机构;底盘上设置有蒜头提升机构和仓斗中。本发明通过设置大蒜夹持切割机构,可对大蒜进行切须和切秧,大蒜头经蒜头输送机构和蒜头提升机构输送到仓斗中,完成收集,收获大蒜的效率高;经切须机构精确切须后的大蒜,残留根须极少,大蒜品相好。
技术研发人员:王康,孙志远,李政席,崔军,王成文,王成力
受保护的技术使用者:江苏商舟智能装备研究院有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!