一种用于青皮萝卜自动采收机的传送系统的制作方法
本发明涉及农业机械,特别是一种用于青皮萝卜自动采收机的传送系统。
背景技术:
1、现有的萝卜采收机基本上能够实现自动化采收,如专利文件cn104380906b所公布的一种胡萝卜机械收获系统、cn114223378b所公布的一种抓取式萝卜收获机器人等,均包括松土扶苗系统、输送或传送系统、切缨整理系统三大部分,以此实现萝卜自动化采收,除此之外,现有技术中的部分联合采收设备带有萝卜自动整理收集、捆扎等系统。总之,现有的萝卜采收已经可以达到相当高的自动化程度。尤其适合种植密度较大的胡萝卜采收,因为胡萝卜上侧边几乎没有侧根,只要敲打或者晃动拔起的胡萝卜,相邻的胡萝卜之间夹带的土块很容易掉落,如此就能完成胡萝卜外侧清理的任务。
2、但在长期实践中,本申请人发现,上述方式并不适合青皮萝卜采收,原因是青皮萝卜个头粗壮且较长、种植间距也大、密度相对较小,且青皮萝卜的底部四周存在较多的相对细小的絮状根须,为了防止青皮萝卜发芽以及方便青皮萝卜的储存,在采收中是需要将青皮萝卜外侧的絮状根须及泥土清理掉,现有设备是采用在传输系统下方装一个带有多个钢筋的转辊,然后使萝卜刚好依次从转动的转辊上经过,多个钢筋敲打经过的萝卜,以期能够达到清理青皮萝卜目的。但在具体实施中,存在以下明显缺陷:其一,由于青皮萝卜个头大重量大, 导致转辊上钢筋敲击青皮萝卜时,很容易出现伤痕,如果敲击力度小,则不足以将根须四周的泥土块清理掉,所以敲击的力度及敲击的程度很难掌握,其二,在上述敲击中,即使是青皮萝卜下端带出的泥块顺利掉落,但是此处的根须依然还在,依然需要后期的修型裁切,现有技术对此无能为力,其三,青皮萝卜或者胡萝卜的上半部分相对于下半部分,上半部分的根须很少或者没有,如果上半部分出现根须,现有技术的转辊并不能实现对萝卜上半部分的根须的清理,其四,即使将现有技术中转辊上的钢筋换成细软的材质,但由于萝卜在传输移动中并不自转,所以也仅仅只能对萝卜的一个侧面上的根须进行清理,其余侧面上的根须依然需要后期进行处理,很显然,这并不是人们所希望的。
3、现提供一种用于青皮萝卜自动采收机的传送系统,能够使得青皮萝卜在传送过程中绕其轴向往复摆动,萝卜与下方的具有弹性的金属条相对转动,使得下方根须及根须上的泥土能够一并去除,在清理过程中不会造成萝卜磕伤扎伤,在清理中能够对萝卜整个外侧进行全方位的清理,能够一次性达到清理效果。
技术实现思路
1、针对上述情况,为克服现有技术之缺陷,本发明提供了一种用于青皮萝卜自动采收机的传送系统,有效的解决现有技术中青皮萝卜在采收时,容易造成萝卜外表面磕伤,外部絮状根须清理不干净的问题。
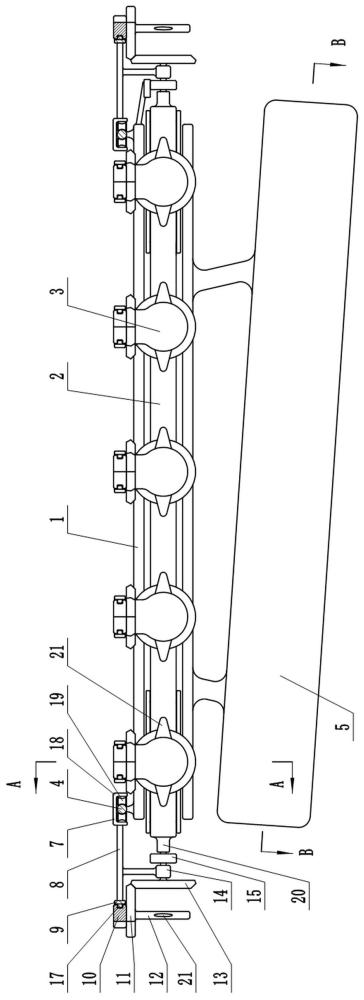
2、其解决的技术方案是,包括用于萝卜自动采收机的传送系统,所述的传送系统包括两个前后对称布置的机架,每个机架上均安装有自带动力的传送带,传送带的外侧面上均布有多个夹紧单元,两个传送带相互靠近的侧边上相互对应的两个夹紧单元能将萝卜缨夹紧,两个传送带转动将萝卜从右向左输送的过程中相互对配合两个夹紧单元能带动萝卜缨绕轴向往复摆动;每个机架上均固定有一个滑轨,滑轨与传送带的形状相仿;每个机架下方均固定有一个竖直的矩形板,矩形板相互靠近的端面上固定有多个细长且具有弹性的金属条,金属条一端与矩形板固定,金属条的另一端向远离其所在的矩形板一侧倾斜;萝卜从右向左移动且自转时,金属条能将萝卜下端的根须及泥土清理。
3、进一步地,所述的夹紧单元包括多个能沿滑轨滑动的滑动单元,滑动单元上固定有水平状的横杆,横杆与滑轨的长度方向保持垂直,横杆远离滑轨的一端上固定有开口向外的弧形板,弧形板内有能转动的转块,弧形板与转块不脱离,转块上固定有与其同轴的不完整锥齿轮,不完整锥齿轮远离转块的端面上固定有竖直的夹板,不完整锥齿轮靠近传送带的一侧上啮合有主动齿轮,主动齿轮为不完全齿轮,主动齿轮转动安装在传送带上,主动齿轮的中心轴上套装有转筒,转筒与横杆经竖杆固定在一起;主动齿轮靠近传送带的一侧上固定有小齿轮,两个机架上相互靠近的一侧均固定有水平的齿条,其中后侧机架上的齿条处于夹紧单元的下方,前侧的机架上的齿条处于夹紧单元的上方,小齿轮随着传送带经过齿条时,小齿轮产生滚动并同时带动主动齿轮转动,同时,相互配合的两个夹紧单元上的主动齿轮的转动方向相反,且在同一时间内只有其中一个夹紧单元内的主动齿轮经有齿部分带动其上的不完全锥齿轮11转动、另一个夹紧单元内的主动齿轮空载。
4、进一步地,所述的弧形板的中心角大于180°,转块、扇形上均设置有开口向外的v形缺口,v形缺口的角度小于180°,转块外圆面上开设有与其同轴的凹槽,弧形板内侧壁上有弧形凸起,弧形凸起与凹槽配合使得转块只能弧形板内转动,且二者不脱离。
5、进一步地,所述的滑动单元包括扣装在滑轨上的u形板,u形板内有多个能转动的辊轮,多个辊轮处于滑轨两侧,辊轮的两端直径大于中间直径,多个辊轮能在滑轨上滚动实现整个滑动单元沿着滑轨移动。
6、进一步地,所述的传送带上固定有多个与主动齿轮一一对应的圆筒,主动齿轮的中心轴转动安装在圆筒内。
7、进一步地,所述的夹板两侧均有水平的弹性件,弹性件的最远端与不完整锥齿轮中心之间的距离大于不完整锥齿轮的半径,在无外力作用下,主动齿轮经弹性件限制不完整锥齿轮的自由转动,使其只能在一定范围内摆动,且其上的v形缺口开口向外;当小齿轮滚动带动主动齿轮转动实现不完整锥齿轮转动时,所对应的夹板获得足够动力克服弹性件的阻力,实现转动,转动中弹性件产生弹性形变。
8、进一步地,所述的金属条在主视视角上,其左端向上倾斜;所述的矩形板自右向左逐渐靠近机架。
9、进一步地,所述的金属条的截面呈竖直的扁圆状。
10、本发明结构巧妙,能够使得青皮萝卜在传送过程中绕其轴向往复摆动,萝卜与下方的具有弹性的金属条相对转动,使得下方根须及根须上的泥土能够一并去除,在清理过程中不会造成萝卜磕伤扎伤,在清理中能够对萝卜整个外侧进行全方位的清理,能够一次性达到清理效果。
技术特征:
1.一种用于青皮萝卜自动采收机的传送系统, 包括用于萝卜自动采收机的传送系统,所述的传送系统包括两个前后对称布置的机架(1),每个机架(1)上均安装有自带动力的传送带(2),传送带(2)的外侧面上均布有多个夹紧单元(3),两个传送带(2)相互靠近的侧边上相互对应的两个夹紧单元(3)能将萝卜缨夹紧,两个传送带(2)转动将萝卜从右向左输送的过程中相互对配合两个夹紧单元(3)能带动萝卜缨绕轴向往复摆动;每个机架(1)上均固定有一个滑轨(4),滑轨(4)与传送带(2)的形状相仿;每个机架(1)下方均固定有一个竖直的矩形板(5),矩形板(5)相互靠近的端面上固定有多个细长且具有弹性的金属条(6),金属条(6)一端与矩形板(5)固定,金属条(6)的另一端向远离其所在的矩形板(5)一侧倾斜;萝卜从右向左移动且自转时,金属条(6)能将萝卜下端的根须及泥土清理。
2.根据权利要求1所述的一种用于青皮萝卜自动采收机的传送系统,其特征在于,所述的夹紧单元(3)包括多个能沿滑轨(4)滑动的滑动单元(7),滑动单元(7)上固定有水平状的横杆(8),横杆(8)与滑轨(4)的长度方向保持垂直,横杆(8)远离滑轨(4)的一端上固定有开口向外的弧形板(9),弧形板(9)内有能转动的转块(10),弧形板(9)与转块(10)不脱离,转块(10)上固定有与其同轴的不完整锥齿轮(11),不完整锥齿轮(11)远离转块(10)的端面上固定有竖直的夹板(12),不完整锥齿轮(11)靠近传送带(2)的一侧上啮合有主动齿轮(13),主动齿轮(13)为不完全齿轮,主动齿轮(13)转动安装在传送带(2)上,主动齿轮(13)的中心轴上套装有转筒(14),转筒(14)与横杆(8)经竖杆固定在一起;主动齿轮(13)靠近传送带(2)的一侧上固定有小齿轮(15),两个机架(1)上相互靠近的一侧均固定有水平的齿条(16),其中后侧机架(1)上的齿条(16)处于夹紧单元(3)的下方,前侧的机架(1)上的齿条(16)处于夹紧单元(3)的上方,小齿轮(15)随着传送带(2)经过齿条(16)时,小齿轮(15)产生滚动并同时带动主动齿轮(13)转动,同时,相互配合的两个夹紧单元(3)上的主动齿轮(13)的转动方向相反,且在同一时间内只有其中一个夹紧单元(3)内的主动齿轮(13)经有齿部分带动其上的不完全锥齿轮(11)转动、另一个夹紧单元(3)内的主动齿轮(13)空载。
3.根据权利要求1所述的一种用于青皮萝卜自动采收机的传送系统,其特征在于,所述的弧形板(9)的中心角大于(180)°,转块(10)、扇形上均设置有开口向外的v形缺口,v形缺口的角度小于(180)°,转块(10)外圆面上开设有与其同轴的凹槽,弧形板(9)内侧壁上有弧形凸起(17),弧形凸起(17)与凹槽配合使得转块(10)只能弧形板(9)内转动,且二者不脱离。
4.根据权利要求2所述的一种用于青皮萝卜自动采收机的传送系统,其特征在于,所述的滑动单元(7)包括扣装在滑轨(4)上的u形板(18),u形板(18)内有多个能转动的辊轮(19),多个辊轮(19)处于滑轨(4)两侧,辊轮(19)的两端直径大于中间直径,多个辊轮(19)能在滑轨(4)上滚动实现整个滑动单元(7)沿着滑轨(4)移动。
5.根据权利要求2所述的一种用于青皮萝卜自动采收机的传送系统,其特征在于,所述的传送带(2)上固定有多个与主动齿轮(13)一一对应的圆筒(20),主动齿轮(13)的中心轴转动安装在圆筒(20)内。
6.根据权利要求2所述的一种用于青皮萝卜自动采收机的传送系统,其特征在于,所述的夹板(12)两侧均有水平的弹性件(21),弹性件(21)的最远端与不完整锥齿轮(11)中心之间的距离大于不完整锥齿轮(11)的半径,在无外力作用下,主动齿轮(13)经弹性件(21)限制不完整锥齿轮(11)的自由转动,使其只能在一定范围内摆动,且其上的v形缺口开口向外;当小齿轮(15)滚动带动主动齿轮(13)转动实现不完整锥齿轮(11)转动时,所对应的夹板(12)获得足够动力克服弹性件(21)的阻力,实现转动,转动中弹性件(21)产生弹性形变。
7.根据权利要求1所述的一种用于青皮萝卜自动采收机的传送系统,其特征在于,所述的金属条(6)在主视视角上,其左端向上倾斜;所述的矩形板(5)自右向左逐渐靠近机架(1)。
8.根据权利要求1所述的一种用于青皮萝卜自动采收机的传送系统,其特征在于,所述的金属条(6)的截面呈竖直的扁圆状。
技术总结
本发明提供了一种用于青皮萝卜自动采收机的传送系统,有效的解决现有技术中青皮萝卜在采收时,容易造成萝卜外表面磕伤,外部絮状根须清理不干净的问题;其解决的技术方案是,包括用于萝卜自动采收机的传送系统,所述的传送系统包括两个机架,每个机架上均安装有传送带,传送带的外侧面上均布有多个夹紧单元,两个传送带转动中能带动萝卜缨绕轴向往复摆动;每个机架上均固定有一个滑轨;每个机架下方均有一个矩形板,矩形板相互靠近的端面上固定有多个金属条,金属条一端与矩形板固定,金属条的另一端向远离其所在的矩形板一侧倾斜;萝卜从右向左移动且自转时,金属条能将萝卜下端的根须及泥土清理。
技术研发人员:杨金兰,田朝辉,李永辉,琚志君,李志萌,蔡伟,张晓炎
受保护的技术使用者:郑州市农业科技研究院
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!