一种灌木果实自动采收装置
本发明属于灌木果实采收,具体涉及一种灌木果实自动采收装置。
背景技术:
1、灌木果实成熟后,需要进行集中采收,现有技术中灌木果实的采收分为人工采收和机械采收,其中机械采收所采用的大多为一种采收机,如公开号为“cn212184226u”的现有专利中所公开的“高效果蔬水果采收机,包括底板,所述底板底部的两侧均活动连接有万向轮,所述底板的顶部固定连接有箱体,所述箱体的右侧设置有竖杆,所述竖杆的顶部安装有收集布,所述箱体右侧底部的前侧和背侧均固定连接有挡板……”,可以看出该申请中所描述的正是一种常见的采收装置,可应用在各种灌木果实的采收;
2、但现有技术中的这种采收机整体构造较为简单,不仅需要人工实时进行操作,还无法保证采收的精准性,同时现有技术中的这种采收机往往只能采收单一种类的果实,而一些茶叶等就无法正常采收,实际使用时存在一定的局限性,为此本发明提出一种灌木果实自动采收装置。
技术实现思路
1、本发明的目的在于提供一种灌木果实自动采收装置,以解决上述背景技术中提出的问题。
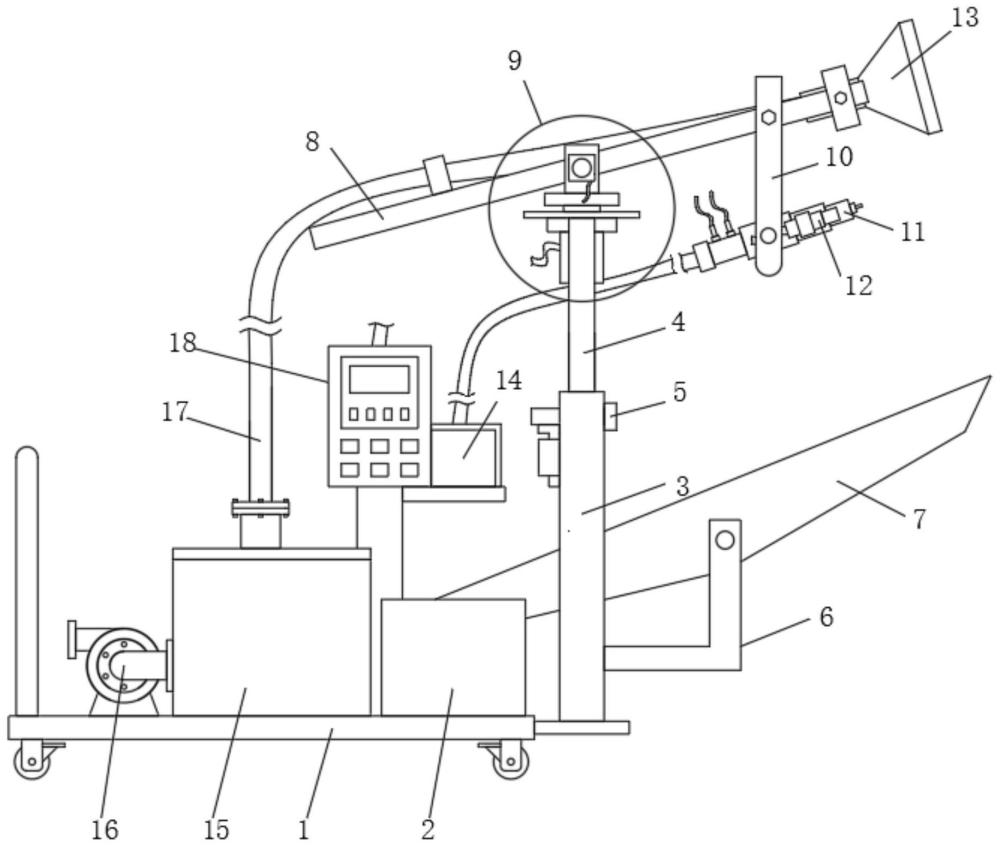
2、为实现上述目的,本发明提供如下技术方案:一种灌木果实自动采收装置,包括车体以及安装在车体顶部的果实存放箱和储物箱,所述车体的右侧对称固定有两个立座,两个所述立座之间通过侧撑杆固定有接果托盘,所述接果托盘的底端延伸至果实存放箱的内侧,两个所述立座的顶端均安装有顶撑杆,两个所述顶撑杆的顶端安装有基杆,所述基杆的顶端固定有底撑杆,所述底撑杆的底部安装有激光切割头,所述激光切割头的一侧表面还安装有红外线定位器,所述车体的顶部表面相对于果实存放箱和储物箱的上方安装有控制柜和激光发生器,所述激光发生器与激光切割头连接,所述储物箱的左侧表面安装有负压风机,所述储物箱的顶部表面连接有吸料管道,所述吸料管道的顶端延伸至基杆的顶端,并安装有吸料风罩。
3、优选的,所述基杆和顶撑杆之间设置有伺服驱动结构,所述伺服驱动结构包括横置基板、伺服电机一、旋转座、u形杆座和伺服电机二,两个所述顶撑杆的顶端固定有横置基板,所述横置基板的顶部表面转动安装有旋转座,所述横置基板的底部表面相对于两个顶撑杆之间安装有伺服电机一,所述伺服电机一的输出端贯穿至横置基板的顶部,并与旋转座连接,所述旋转座的顶部表面固定有u形杆座,所述基杆通过转轴与u形杆座转动连接,所述伺服电机二安装在u形杆座的一侧表面,且伺服电机二的输出端贯穿至u形杆座的内侧,并与基杆一侧的转轴连接。
4、优选的,还包括控制系统,所述控制系统包括主控芯片、激光收割模块、负压吸取模块、定位模块和驱动模块,所述激光收割模块、负压吸取模块、定位模块和驱动模块均与主控芯片连接,所述激光收割模块与激光切割头连接,所述负压吸取模块与负压风机连接,所述定位模块与红外线定位器连接,所述驱动模块与伺服驱动结构连接。
5、优选的,所述顶撑杆的底端活动插入至立座的内侧,且与立座之间设置有调节机构,所述调节机构包括插销、插孔和限位结构,所述顶撑杆的底端表面贯穿开设有多个与插销相对应的插孔,所述立座的顶端表面贯穿开设有供插销贯穿的侧孔,所述插销通过侧孔贯穿立座和其中一个插孔,所述插销的左端贯穿至立座的左侧,所述限位结构设置在立座的左侧,所述限位结构包括固定在立座左侧表面的侧座块,所述侧座块上贯穿开设有活动口,所述活动口内活动贯穿有l形活动块,所述l形活动块的顶端伸出至侧座块的顶部,并处于插销的底部,所述l形活动块的顶端表面固定有弧形限位凸起,所述插销的左端表面对称开设有两个与弧形限位凸起相对应的限位卡槽,所述弧形限位凸起嵌入至其中一个限位卡槽中,所述活动口的一侧内壁开设有侧槽,所述侧槽内安装有弹簧,所述l形活动块的一侧表面固定有侧滑块,且所述侧滑块处于侧槽内,并与弹簧的顶端连接。
6、与现有技术相比,本发明的有益效果是:本发明通过对现有技术的采摘机进行改进优化,设计了激光切割头、红外线定位器和负压吸料结构,并设计相应的控制系统,可自动精准的完成对灌木果实的自动切断采收,同时当采收的是一些茶叶等质地较轻的物料时,可通过负压吸料的方式完成切断后这些茶叶等物料的吸取,提高采摘效率。
技术特征:
1.一种灌木果实自动采收装置,其特征在于:包括车体(1)以及安装在车体(1)顶部的果实存放箱(2)和储物箱(15),所述车体(1)的右侧对称固定有两个立座(3),两个所述立座(3)之间通过侧撑杆(6)固定有接果托盘(7),所述接果托盘(7)的底端延伸至果实存放箱(2)的内侧,两个所述立座(3)的顶端均安装有顶撑杆(4),两个所述顶撑杆(4)的顶端安装有基杆(8),所述基杆(8)的顶端固定有底撑杆(10),所述底撑杆(10)的底部安装有激光切割头(11),所述激光切割头(11)的一侧表面还安装有红外线定位器(12),所述车体(1)的顶部表面相对于果实存放箱(2)和储物箱(15)的上方安装有控制柜(18)和激光发生器(14),所述激光发生器(14)与激光切割头(11)连接。
2.根据权利要求1所述的一种灌木果实自动采收装置,其特征在于:所述储物箱(15)的左侧表面安装有负压风机(16),所述储物箱(15)的顶部表面连接有吸料管道(17),所述吸料管道(17)的顶端延伸至基杆(8)的顶端,并安装有吸料风罩(13)。
3.根据权利要求1所述的一种灌木果实自动采收装置,其特征在于:所述基杆(8)和顶撑杆(4)之间设置有伺服驱动结构(9),所述伺服驱动结构(9)包括横置基板(91)、伺服电机一(92)、旋转座(93)、u形杆座(94)和伺服电机二(95)。
4.根据权利要求3所述的一种灌木果实自动采收装置,其特征在于:两个所述顶撑杆(4)的顶端固定有横置基板(91),所述横置基板(91)的顶部表面转动安装有旋转座(93),所述横置基板(91)的底部表面相对于两个顶撑杆(4)之间安装有伺服电机一(92),所述伺服电机一(92)的输出端贯穿至横置基板(91)的顶部,并与旋转座(93)连接,所述旋转座(93)的顶部表面固定有u形杆座(94),所述基杆(8)通过转轴与u形杆座(94)转动连接,所述伺服电机二(95)安装在u形杆座(94)的一侧表面,且伺服电机二(95)的输出端贯穿至u形杆座(94)的内侧,并与基杆(8)一侧的转轴连接。
5.根据权利要求1所述的一种灌木果实自动采收装置,其特征在于:还包括控制系统,所述控制系统包括主控芯片、激光收割模块、负压吸取模块、定位模块和驱动模块,所述激光收割模块、负压吸取模块、定位模块和驱动模块均与主控芯片连接,所述激光收割模块与激光切割头(11)连接,所述负压吸取模块与负压风机(16)连接,所述定位模块与红外线定位器(12)连接,所述驱动模块与伺服驱动结构(9)连接。
6.根据权利要求1所述的一种灌木果实自动采收装置,其特征在于:所述顶撑杆(4)的底端活动插入至立座(3)的内侧,且与立座(3)之间设置有调节机构(5)。
7.根据权利要求6所述的一种灌木果实自动采收装置,其特征在于:所述调节机构(5)包括插销(51)、插孔(52)和限位结构(53),所述顶撑杆(4)的底端表面贯穿开设有多个与插销(51)相对应的插孔(52),所述立座(3)的顶端表面贯穿开设有供插销(51)贯穿的侧孔,所述插销(51)通过侧孔贯穿立座(3)和其中一个插孔(52),所述插销(51)的左端贯穿至立座(3)的左侧。
8.根据权利要求7所述的一种灌木果实自动采收装置,其特征在于:所述限位结构(53)设置在立座(3)的左侧,所述限位结构(53)包括固定在立座(3)左侧表面的侧座块(531),所述侧座块(531)上贯穿开设有活动口(535),所述活动口(535)内活动贯穿有l形活动块(532),所述l形活动块(532)的顶端伸出至侧座块(531)的顶部,并处于插销(51)的底部,所述l形活动块(532)的顶端表面固定有弧形限位凸起(533),所述插销(51)的左端表面对称开设有两个与弧形限位凸起(533)相对应的限位卡槽(534),所述弧形限位凸起(533)嵌入至其中一个限位卡槽(534)中,所述活动口(535)的一侧内壁开设有侧槽(536),所述侧槽(536)内安装有弹簧(537),所述l形活动块(532)的一侧表面固定有侧滑块(538),且所述侧滑块(538)处于侧槽(536)内,并与弹簧(537)的顶端连接。
技术总结
本发明公开了一种灌木果实自动采收装置,包括车体以及安装在车体顶部的果实存放箱和储物箱,所述车体的右侧对称固定有两个立座,两个所述立座之间通过侧撑杆固定有接果托盘,两个所述立座的顶端均安装有顶撑杆,两个所述顶撑杆的顶端安装有基杆,所述基杆的顶端固定有底撑杆,所述底撑杆的底部安装有激光切割头,所述激光切割头的一侧表面还安装有红外线定位器;本发明通过对现有技术的采摘机进行改进优化,设计了激光切割头、红外线定位器和负压吸料结构,并设计相应的控制系统,可自动精准的完成对灌木果实的自动切断采收,同时当采收的是一些茶叶等质地较轻的物料时,可通过负压吸料的方式完成切断后这些茶叶等物料的吸取,提高采摘效率。
技术研发人员:支远,李东晓,陈全进,欧阳兆珊,程靖琰,吴梦芸,方瀚翔,周素玲
受保护的技术使用者:浙江大学金华研究院
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!