柔性摆动式鱼形机器人
本技术涉及机器人,具体为柔性摆动式鱼形机器人。
背景技术:
1、鱼类仅靠扭动身体,便能在水中悠闲地游来游去,而人类制造的轮船则不得不依靠螺旋桨才能前进,能不能尝试着用另外一种方法,让轮船像鱼一样在水中忽东忽西,自由自在呢?北京航空航天大学机器人研究所,一条长0.8米的机器鱼(robofish)在一项全新的仿生学研究成果——波动推进下,顺利实现了不用螺旋桨的设想,鱼形机器人鱼类仅靠扭动身体,便能在水中悠闲地游来游去,而人类制造的轮船则不得不依靠螺旋桨才能前进,能不能尝试着用另外一种方法,让轮船像鱼一样在水中忽东忽西,自由自在呢?北京航空航天大学机器人研究所,一条长0.8米的 机器鱼(robofish)在一项全新的 仿生学研究成果——波动推进下,顺利实现了不用螺旋桨的设想,鱼体是一个平面6关节机构(即有6节鱼身),包括鱼头和鱼尾两个部分,鱼头是利用玻璃钢制作的,仿造鲨鱼外形的壳体,整个鱼的动力电池,控制接收部分都放在鱼头里,鱼尾的6个伺服电机扭转摆动作为推动器,这种机器鱼与9月下旬日本推出的宠物机器鱼并不相同,宠物机器鱼依靠的是内置 太阳能电池和马达作为 推进器。
2、授权公告号为cn 208144230 u的中国专利公布了摆动式鱼缸清洁机器人,其通过推进器使得机身贴附于鱼缸内壁上,在机身的底部设置有前转盘和后转盘,第一驱动电机和第二驱动电机由驱动控制电路控制,为前转盘和后转盘提供相同或相反的转动动力,第一调速机构和第二调速机构分别控制前、后转盘以相同或具有差异的转速来转动,从而实现机器人机身的摆动,使得机器人以摆动方式实现在鱼缸内壁上的行走,而驱动控制电路通过陀螺仪数据来控制调节机身行走的角度、速度等,行走过程中擦布实施对鱼缸内壁的清洁,从而通过摆动行走方式实现对鱼缸内壁的清洁,但是上述装置在使用时还存在一些缺陷,上述装置仅仅只是在对浴缸的内壁进行了擦洗,擦洗掉的附作物还是会存在于浴缸内部,最后还是会附着与鱼缸的内壁上,导致其清洁的效果一般,故而提出柔性摆动式鱼形机器人来解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了柔性摆动式鱼形机器人,具备等清洁效果好、清理方便优点,解决了上述装置在对鱼缸进行清洁效果一般的问题。
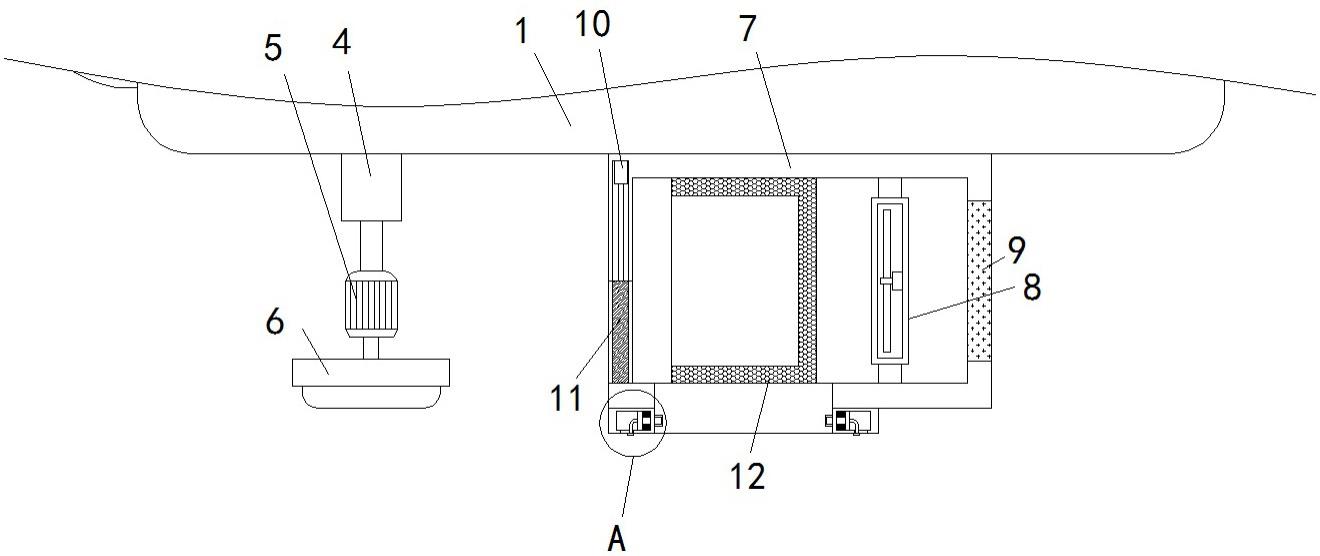
2、为实现上述目的,本实用新型提供如下技术方案:柔性摆动式鱼形机器人,包括鱼形机器人本体,所述鱼形机器人本体外表面设置有侧鳍,所述鱼形机器人本体右侧设置有尾翼,所述鱼形机器人本体底部设置有清洁组件;
3、所述清洁组件包括有固定连接于鱼形机器人本体底部的清理箱,所述清理箱内部固定连接有转动叶,所述清理箱内壁内部固定连接有滤板,所述清理箱内壁内部固定连接有第一电动推杆,所述第一电动推杆底部固定连接有挡板,所述清理箱内部设置有滤篮,所述滤篮底部固定连接有固定板,所述清理箱底部固定连接有固定块,所述固定块内部活动连接有滑板,所述滑板靠近固定板的一侧固定连接有卡块,所述固定板外表面开设有卡槽,所述滑板靠近固定板的一侧固定连接有弹簧,所述滑板远离固定板的一侧固定连接有拉杆,所述固定块底部开设有滑槽。
4、进一步,所述清理箱左侧开设有开口,所述挡板位于开口内部,所述鱼形机器人本体、侧鳍和尾翼均采用柔性材质。
5、进一步,所述滤篮活动连接于清理箱内部,所述固定板活动连接于清理箱内部。
6、进一步,所述卡块活动连接于卡槽内部,所述卡块活动连接于固定块内部且贯穿固定块内壁。
7、进一步,所述弹簧与固定块内壁为固定连接,所述滑板截面形状为矩形。
8、进一步,所述拉杆滑动连接于滑槽内部。
9、进一步,所述拉杆底部固定连接有拉帽,所述拉帽外表面开设有防滑纹。
10、进一步,所述鱼形机器人本体底部固定连接有第二电动推杆,所述第二电动推杆底部固定连接有电机,所述电机底部固定连接有清理刷。
11、与现有技术相比,本申请的技术方案具备以下有益效果:
12、该柔性摆动式鱼形机器人,鱼形机器人本体在浴缸摆动前行时通过第二电动推杆、电机和清理刷将浴缸内壁进行清扫,通过开口将水中杂质吸收到处理箱内部,滤篮会将杂质进行过滤,当需要将滤篮内部的杂质进行清理时,可以拉帽向远离固定板的一侧拉动,拉帽移动带动拉杆、滑板和卡块移动,卡块即可从卡槽内部移出,即可将固定板和滤篮从处理箱内部取出进行清理。
技术特征:
1.柔性摆动式鱼形机器人,包括鱼形机器人本体(1),其特征在于:所述鱼形机器人本体(1)外表面设置有侧鳍(2),所述鱼形机器人本体(1)右侧设置有尾翼(3),所述鱼形机器人本体(1)底部设置有清洁组件;
2.根据权利要求1所述的柔性摆动式鱼形机器人,其特征在于:所述清理箱(7)左侧开设有开口,所述挡板(11)位于开口内部,所述鱼形机器人本体(1)、侧鳍(2)和尾翼(3)均采用柔性材质。
3.根据权利要求1所述的柔性摆动式鱼形机器人,其特征在于:所述滤篮(12)活动连接于清理箱(7)内部,所述固定板(13)活动连接于清理箱(7)内部。
4.根据权利要求1所述的柔性摆动式鱼形机器人,其特征在于:所述卡块(16)活动连接于卡槽(17)内部,所述卡块(16)活动连接于固定块(14)内部且贯穿固定块(14)内壁。
5.根据权利要求1所述的柔性摆动式鱼形机器人,其特征在于:所述弹簧(18)与固定块(14)内壁为固定连接,所述滑板(15)截面形状为矩形。
6.根据权利要求1所述的柔性摆动式鱼形机器人,其特征在于:所述拉杆(19)滑动连接于滑槽(20)内部。
7.根据权利要求1所述的柔性摆动式鱼形机器人,其特征在于:所述拉杆(19)底部固定连接有拉帽(21),所述拉帽(21)外表面开设有防滑纹。
8.根据权利要求1所述的柔性摆动式鱼形机器人,其特征在于:所述鱼形机器人本体(1)底部固定连接有第二电动推杆(4),所述第二电动推杆(4)底部固定连接有电机(5),所述电机(5)底部固定连接有清理刷(6)。
技术总结
本技术涉及柔性摆动式鱼形机器人,包括鱼形机器人本体,所述鱼形机器人本体外表面设置有侧鳍,所述鱼形机器人本体右侧设置有尾翼,所述鱼形机器人本体底部设置有清洁组件,所述清洁组件包括有固定连接于鱼形机器人本体底部的清理箱,所述清理箱内部固定连接有转动叶。该柔性摆动式鱼形机器人,鱼形机器人本体在浴缸摆动前行时通过第二电动推杆、电机和清理刷将浴缸内壁进行清扫,通过开口将水中杂质吸收到处理箱内部,滤篮会将杂质进行过滤,当需要将滤篮内部的杂质进行清理时,可以拉帽向远离固定板的一侧拉动,拉帽移动带动拉杆、滑板和卡块移动,卡块即可从卡槽内部移出,即可将固定板和滤篮从处理箱内部取出进行清理。
技术研发人员:李华忠,陈敏娜,朱倩倩,黄日东
受保护的技术使用者:深圳信息职业技术学院
技术研发日:20230220
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!