农耕机器人支点滑移升降结构的制作方法
本技术涉及升降结构,具体为农耕机器人支点滑移升降结构。
背景技术:
1、农耕机器人是用于农业生产的特种机器人,农耕机器人的问世,是现代农业机械发展的结果,农耕机器人因体积小、机动灵活、解决了山区、丘区、大棚、经济林下耕作的需要,在农耕机器人工作时,需要使用到支点滑移升降结构,对旋耕器的升降状态进行控制。
2、现有的支点滑移升降结构(具体结构远离,详见本申请方案说明书工作原理),在使用时,通过气缸控制旋耕器进行升降,且通过滑移结构对旋耕器进行支撑,因滑移结构需要支撑旋耕器,导致滑移结构在使用时,会出现较大的磨损,在磨损程度较大后,会导致滑槽与滑块的间隙增大,使得旋耕器在升降时,会产生晃动,不便使用,因此我们提出了农耕机器人支点滑移升降结构,以解决所提出的问题。
技术实现思路
1、本实用新型的目的在于提供农耕机器人支点滑移升降结构,达到了通过设置的调节机构,调节活动挡板到固定挡板之间的间距,减小第一滑槽与第一滑块之间的间隙,避免第一滑块与第一滑槽的间隙过大,导致旋耕器在升降时发生晃动,使旋耕器能够平稳升降的目的。
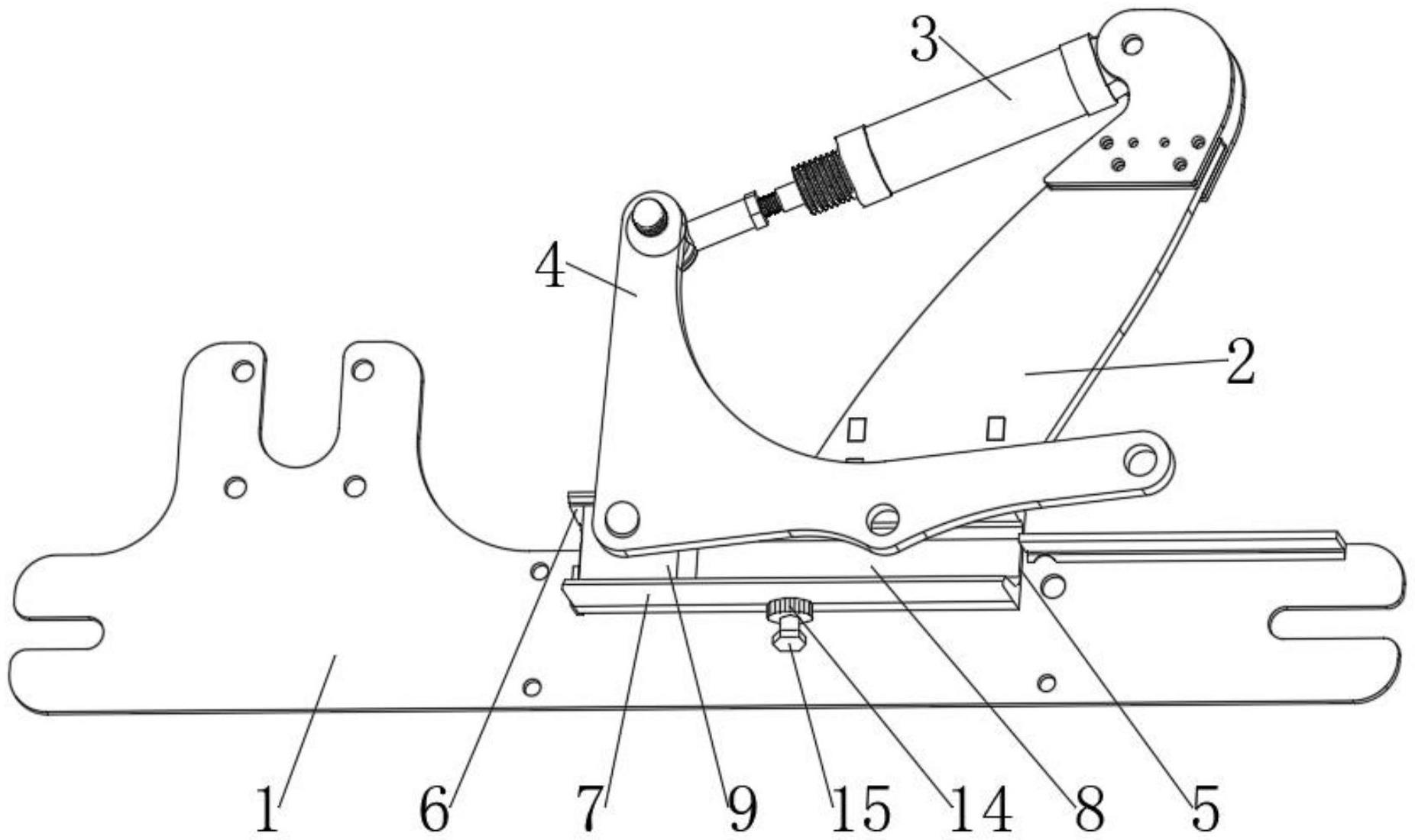
2、为实现上述目的,本实用新型提供如下技术方案:农耕机器人支点滑移升降结构,包括支架,所述支架的一侧顶部安装有气缸架,所述气缸架靠近顶部一侧转动连接有气缸,其中,
3、所述气缸远离气缸架的一端与l型臂的端部转动连接,所述支架靠近顶部的侧面固定有滑轨架,所述滑轨架靠近上方的外侧固定有固定挡板,所述滑轨架靠近下方的外侧设置有活动挡板;
4、所述滑轨架、固定挡板与活动挡板构成第一滑槽,所述第一滑槽内滑动连接有第一滑块,所述第一滑块通过转轴与l型臂直角处转动连接,所述活动挡板通过调节机构调节其与固定挡板之间的间距。
5、优选的,所述第一滑块为矩形块,且第一滑块的外部尺寸与第一滑槽的内部尺寸相吻合。
6、优选的,所述调节机构包括第二滑槽,所述滑轨架靠近活动挡板一侧开设有第二滑槽,所述活动挡板靠近第二滑槽一侧固定有第二滑块,所述第二滑槽内转动连接有丝杆,所述丝杆的底端贯穿滑轨架的底部延伸到外侧,所述丝杆靠近滑轨架外侧一端固定有齿轮,所述齿轮的底端固定有六角头,所述丝杆通过锁紧机构进行锁紧。
7、优选的,所述锁紧机构包括支撑架,所述活动挡板对应齿轮的底部固定有支撑架,所述支撑架的中部贯穿有拉杆槽,所述拉杆槽的内部贯穿有拉杆,所述拉杆靠近齿轮的一端固定有顶板,所述顶板对应齿轮的一侧等距固定有锁齿,所述顶板到支撑架之间的拉杆上套有弹簧。
8、优选的,所述拉杆为矩形柱状,且拉杆的外部尺寸与拉杆槽的内部尺寸相吻合。
9、与现有技术相比,本实用新型的有益效果如下:
10、1、本实用新型,通过该支点滑移升降结构,能够通过气缸带动旋耕器进行升降,在第一滑块与第一滑槽因磨损导致间隙较大时,通过设置的调节机构,调节活动挡板到固定挡板之间的间距,减小第一滑槽与第一滑块之间的间隙,避免第一滑块与第一滑槽的间隙过大,导致旋耕器在升降时发生晃动,使旋耕器能够平稳升降。
11、2、本实用新型,需要转动丝杆时,通过拉杆带动顶板克服弹簧弹力并带动锁齿远离齿轮,使丝杆能够转动,对活动挡板的位置进行调节,调节完成后,松开拉杆,弹簧推动顶板朝齿轮方向移动,使顶板带动锁齿与齿轮完成啮合,通过啮合的锁齿与齿轮,对丝杆锁紧,避免丝杆因受到震动自动产生转动。
技术特征:
1.农耕机器人支点滑移升降结构,包括支架(1),其特征在于:所述支架(1)的一侧顶部安装有气缸架(2),所述气缸架(2)靠近顶部一侧转动连接有气缸(3),其中,
2.根据权利要求1所述的农耕机器人支点滑移升降结构,其特征在于:所述第一滑块(9)为矩形块,且第一滑块(9)的外部尺寸与第一滑槽(8)的内部尺寸相吻合。
3.根据权利要求1所述的农耕机器人支点滑移升降结构,其特征在于:所述调节机构包括第二滑槽(11),所述滑轨架(5)靠近活动挡板(7)一侧开设有第二滑槽(11),所述活动挡板(7)靠近第二滑槽(11)一侧固定有第二滑块(12),所述第二滑槽(11)内转动连接有丝杆(13),所述丝杆(13)的底端贯穿滑轨架(5)的底部延伸到外侧,所述丝杆(13)靠近滑轨架(5)外侧一端固定有齿轮(14),所述齿轮(14)的底端固定有六角头(15),所述丝杆(13)通过锁紧机构进行锁紧。
4.根据权利要求3所述的农耕机器人支点滑移升降结构,其特征在于:所述锁紧机构包括支撑架(16),所述活动挡板(7)对应齿轮(14)的底部固定有支撑架(16),所述支撑架(16)的中部贯穿有拉杆槽(17),所述拉杆槽(17)的内部贯穿有拉杆(18),所述拉杆(18)靠近齿轮(14)的一端固定有顶板(19),所述顶板(19)对应齿轮(14)的一侧等距固定有锁齿(20),所述顶板(19)到支撑架(16)之间的拉杆(18)上套有弹簧(21)。
5.根据权利要求4所述的农耕机器人支点滑移升降结构,其特征在于:所述拉杆(18)为矩形柱状,且拉杆(18)的外部尺寸与拉杆槽(17)的内部尺寸相吻合。
技术总结
本技术公开了农耕机器人支点滑移升降结构,包括支架,支架的一侧顶部安装有气缸架,气缸架靠近顶部一侧转动连接有气缸,其中,气缸远离气缸架的一端与L型臂的端部转动连接,支架靠近顶部的侧面固定有滑轨架,滑轨架靠近上方的外侧固定有固定挡板,滑轨架靠近下方的外侧设置有活动挡板,滑轨架、固定挡板与活动挡板构成第一滑槽。本技术,通过该支点滑移升降结构,能够通过气缸带动旋耕器进行升降,在第一滑块与第一滑槽因磨损导致间隙较大时,通过设置的调节机构,调节活动挡板到固定挡板之间的间距,减小第一滑槽与第一滑块之间的间隙,避免第一滑块与第一滑槽的间隙过大,导致旋耕器在升降时发生晃动,使旋耕器能够平稳升降。
技术研发人员:辜晓林,王毓民,刘树霖,辜彬慧,赵彬蔚
受保护的技术使用者:绵阳市朝育机械有限公司
技术研发日:20230227
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!