刀具模组与割草机器人的制作方法
本申请涉及割草机器人,尤其涉及一种刀具模组与割草机器人。
背景技术:
1、滚刀式割草机器人通过滚刀与定刀配合进行割草,通常会涉及到对滚刀与定刀的修正操作,比如对刀操作和磨刀操作等。滚刀与定刀之间间隙过大割草效果不理想,没有间隙虽然割草效果好但是滚刀与定刀之间碰撞会导致噪音较大且使用寿命大幅缩短,因此需要将滚刀与定刀之间的间隙设置为标准小间隙,这样既可以达到理想的割草效果又能减小噪音延长刀具的使用寿命,但是用户通常只有在割草效果在比较不理想或有噪音时才会发现滚刀与定刀之间的间隙过大或没有间隙进行手动调整,手动将滚刀与定刀的间隙调整为标准小间隙并不容易调准且不够自动化,因此如何识别滚刀与定刀之间的间隙不属于标准小间隙,并在识别出来后通过自动化的方式进行对刀操作将滚刀与定刀的间隙调整为标准小间隙需要进行解决。另外割草过程中,刀具撞击到地面上的砂石、木质纤维等会出现刀刃卷曲、微小破口以及裂纹,需要及时的研磨能保持刀刃的锋利,保证好的切割品质;传统的磨刀需要专业人员将滚刀组件架在专用磨刀架上用外圆磨进行磨刀,或者在割草机器人上将滚刀反向转动并刷研磨剂进行磨刀,磨刀效果由人眼进行判断,这种磨刀的方式费时费力且需要专业人员操作不够自动化,磨刀效果通过专业人员的经验去判断容易导致磨刀质量不一,因此,如何识别刀具是否需要磨刀并在需要磨刀时通过自动化的方式进行磨刀操作是需要解决的问题。
技术实现思路
1、为此,本申请提供一种刀具模组与割草机器人,以解决上述技术问题。
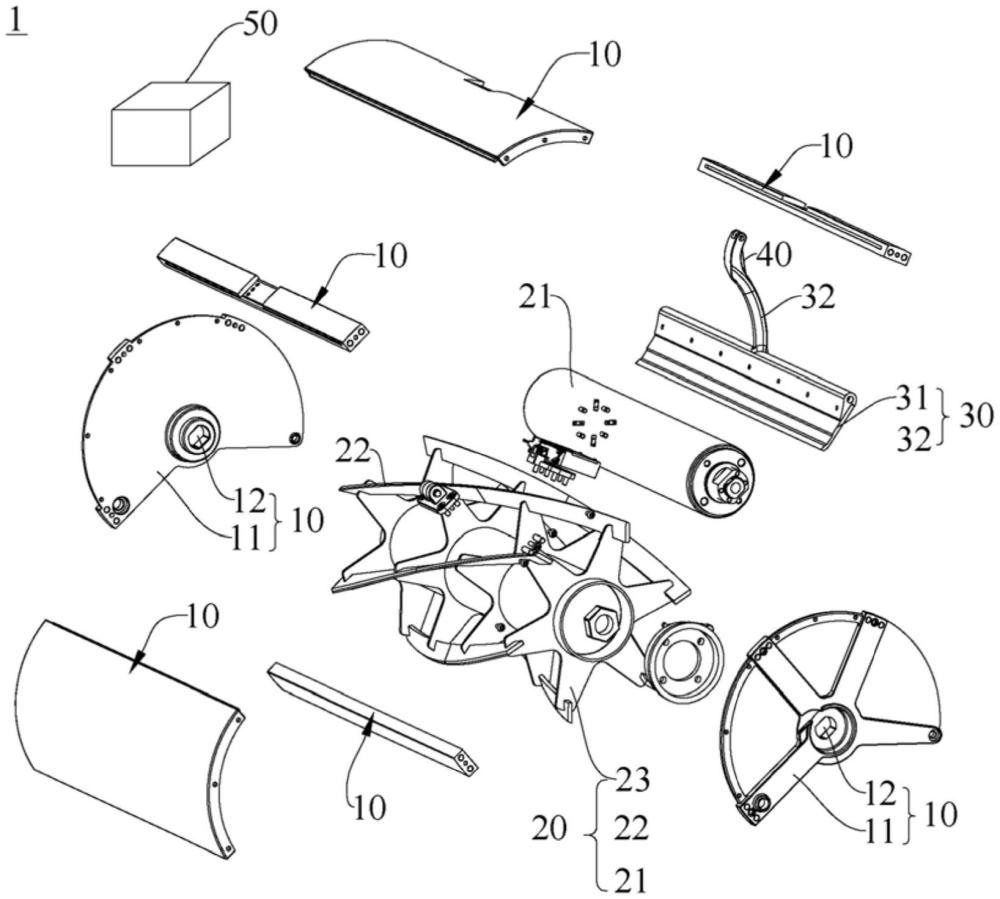
2、本申请第一方面提供一种刀具模组,所述刀具模组包括:壳体、滚刀组件、定刀组件、振动传感器与控制器;
3、所述壳体包括两个相对的侧壳;
4、所述滚刀组件与所述定刀组件均设置于两相对的所述侧壳之间,所述滚刀组件与所述定刀组件相互配合以对位于所述滚刀组件与所述定刀组件之间的物体进行剪割;
5、所述振动传感器连接于所述定刀组件,所述振动传感器用于采集所述定刀组件上的振动,并生成相应的电信号;
6、所述控制器与所述振动传感器连接,所述控制器用于处理所述电信号得到振动波形,并基于所述振动波形确定所述刀具模组需要进行修正时,控制执行修正操作。
7、本申请第二方面提供一种割草机器人,所述割草机器人包括前述刀具模组。
8、本申请中,通过振动传感器采集所述定刀组件上的振动,所述控制器处理所述电信号得到振动波形,并基于所述振动波形判断是否需要进行修正操作(比如对刀操作与磨刀操作等),当需要进行修正时,控制执行修正操作以实现修正操作的自动化。
技术特征:
1.一种刀具模组,其特征在于,所述刀具模组包括:壳体、滚刀组件、定刀组件、振动传感器与控制器;
2.根据权利要求1所述的刀具模组,其特征在于,所述修正操作包括对刀操作和磨刀操作,在所述对刀操作下,所述滚刀组件与所述定刀组件之间的距离被矫正至预设距离内,在所述磨刀操作下,所述滚刀组件与所述定刀组件进行相互研磨。
3.根据权利要求2所述的刀具模组,其特征在于,所述滚刀组件包括转动轴与至少一个滚刀刀片;
4.根据权利要求3所述的刀具模组,其特征在于,所述滚刀组件还包括至少一个滚刀支撑架,所述至少一个滚刀支撑架固定于所述转动轴上;所述至少一个滚刀刀片固定于所述至少一个滚刀支撑架上而与所述转动轴连接。
5.根据权利要求3所述的刀具模组,其特征在于,所述滚刀刀片为螺旋状刀片,且所述滚刀刀片的各个位置的最外侧与所述转动轴的轴心的距离相等。
6.根据权利要求5所述的刀具模组,其特征在于,所述定刀组件包括定刀刀片,所述定刀刀片与两个相对的所述侧壳的底部转动连接并与所述转动轴平行,在所述转动轴转动时,带动所述滚刀刀片转动,且每个滚刀刀片的不同位置的刀锋先后运动至与所述定刀刀片的刀锋对应的位置,以对所述滚刀刀片在转动过程中拢集在所述滚刀刀片与所述定刀刀片之间的物体进行剪割,其中,所述对刀操作下,所述滚刀刀片的刀锋与所述定刀刀片的刀锋的距离被矫正至预设距离范围内。
7.根据权利要求6所述的刀具模组,其特征在于,所述刀具模组还包括定刀调节器,所述定刀组件还包括第一连接件;所述定刀调节器设置于所述壳体上,所述第一连接件连接于所述定刀刀片与所述定刀调节器之间,所述定刀调节器用于至少在对刀操作下响应所述控制器的控制,而驱动所述第一连接件移动,以通过所述第一连接件进一步驱动所述定刀片转动。
8.根据权利要求7所述的刀具模组,其特征在于,所述振动传感器设置于所述第一连接件中。
9.根据权利要求7所述的刀具模组,其特征在于,所述定刀调节器包括第一电机、齿轮组、丝杆、导向杆与活动件,所述齿轮组包括第一外齿轮与第二外齿轮,所述活动件包括配合部、推动部与导向孔;
10.根据权利要求9所述的刀具模组,其特征在于,所述滚刀组件还包括第二电机,所述第二电机用于驱动所述转动轴转动以带动所述滚刀刀片相对于所述定刀刀片转动;
11.根据权利要求10所述的刀具模组,其特征在于,在进行磨刀操作时,所述定刀调节器还用于驱动所述定刀刀片逐渐朝与所述滚刀刀片过盈的方向转动。
12.一种割草机器人,其特征在于,所述割草机器人包括权利要求1-11任意一项所述的刀具模组。
技术总结
本申请提供一种刀具模组与割草机器人。割草机器人包括刀具模组,所述刀具模组包括:壳体、滚刀组件、定刀组件、振动传感器与控制器;所述壳体包括两个相对的侧壳;所述滚刀组件与所述定刀组件均设置于两相对的所述侧壳之间,所述滚刀组件与所述定刀组件相互配合以对位于所述滚刀组件与所述定刀组件之间的物体进行剪割;所述振动传感器连接于所述定刀组件,所述振动传感器用于采集所述定刀组件上的振动,并生成相应的电信号;所述控制器用于处理所述电信号得到振动波形,并基于所述振动波形确定所述刀具模组需要进行修正时,控制执行修正操作,从而,实现修正操作的自动化,比如,实现对刀操作与磨刀操作的自动化。
技术研发人员:王永明,丘力
受保护的技术使用者:深圳森合创新科技有限公司
技术研发日:20230301
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!