一种无人驾驶深松免耕机组
本技术属于农业机械,尤其涉及一种无人驾驶深松免耕机组。
背景技术:
1、在农业生产中,耕地是最重要、最基础的环节,耕地环节的好坏直接影响着农作物的生长情况。我国农田类型丰富,耕作要求大不相同,但由于近年来长期旋耕作业及机械碾压,造成耕作层上浮,犁底层逐年加厚,耕作层保肥保水能力降低,影响作物根系下扎,抗灾能力低,制约农作物稳产高产。而深松免耕机能进行深松免耕作业,可以在不影响农业产量的前提下,同时对农田进行高效的生态修复,恢复土壤理化性能。
2、当前市面上大功率拖拉机虽性能强悍,但依然存在大量污染物随尾气排放的问题,同时现行主流深松免耕机大都体积庞大,操作笨重,在工作的同时产生巨大噪音影响田间生态系统平衡,除此之外,油耗巨大所造成的使用成本过高等问题一直困扰着农民的农业生产活动。而国外引进的机器不仅价格昂贵,而且不适用于我国各地区不同类型的土壤环境。
3、因此,亟需设计一种无人驾驶深松免耕机组来解决上述的技术问题。
技术实现思路
1、为解决上述技术问题,本实用新型提出了一种无人驾驶深松免耕机组。
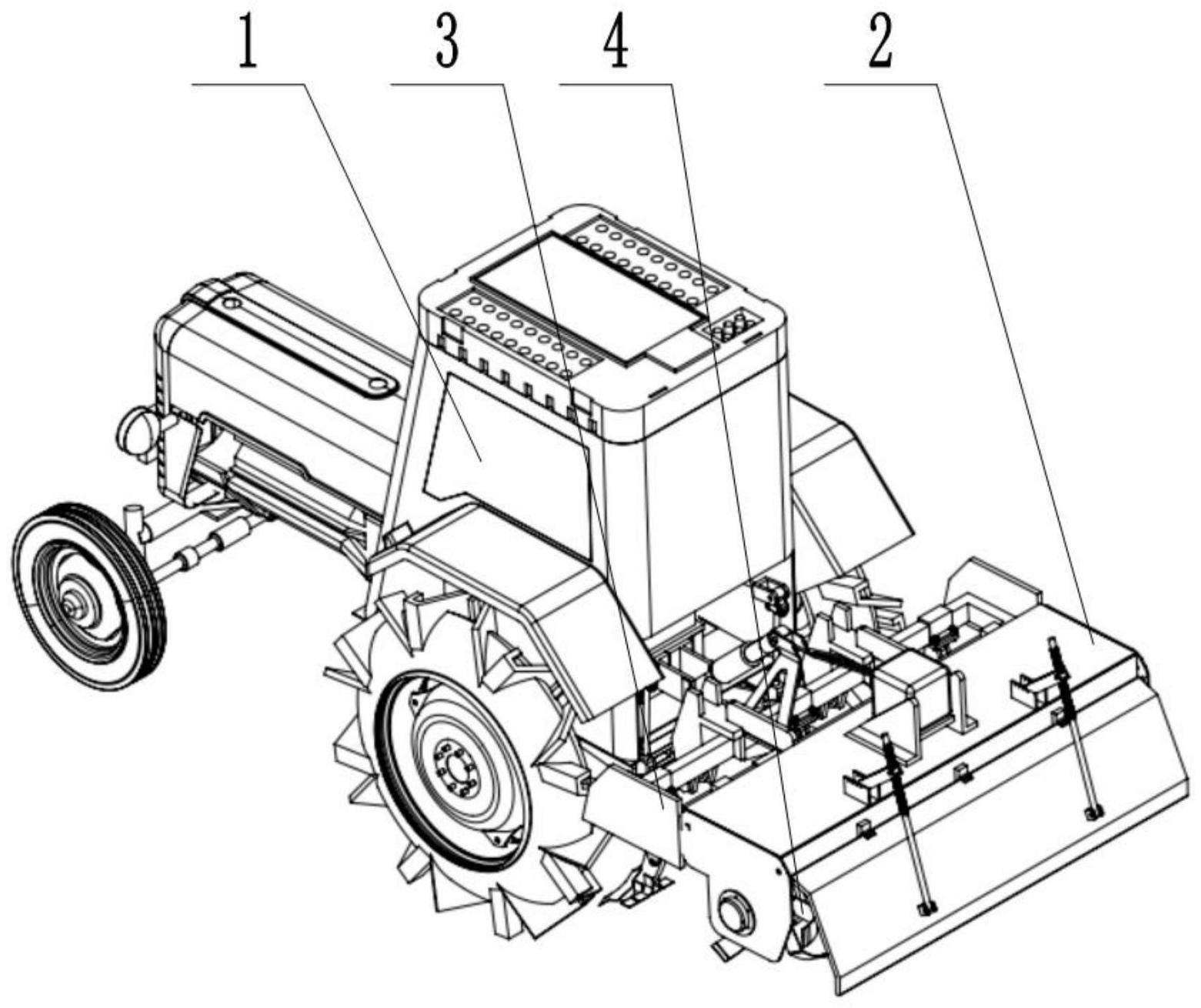
2、为实现上述目的,本实用新型提供了一种无人驾驶深松免耕机组,包括:
3、无人拖拉机,所述无人拖拉机包括气动系统和电驱动系统;
4、机架,所述机架设置在所述无人拖拉机尾端并固定安装在所述气动系统上;
5、深松机构,所述深松机构包括若干阵列固接在所述机架上的深松铲,所述深松铲上对称安装有若干铲翼;
6、旋耕机构,所述旋耕机构固定安装在所述机架上,且所述深松机构位于所述旋耕机构与所述无人拖拉机之间;所述旋耕机构的尾端固定安装有耙平组件。
7、优选的,所述深松铲包括弯曲设置的主体,所述主体朝向所述无人拖拉机弯曲;所述主体的底端固接有铲齿;若干所述铲翼对称固接在所述主体的两侧。
8、优选的,所述铲翼为弯折的直角形,所述铲翼的一直角边与所述主体固接,所述铲翼的另一直角边向远离所述主体的一侧延伸。
9、优选的,所述旋耕机构包括转动连接在所述机架上的旋耕轴,所述旋耕轴与固定安装在所述机架上的旋耕电机传动连接;所述旋耕轴的外壁固接有若干等间距设置的刀盘,所述刀盘上固接有若干轴向等间距设置的旋耕刀片。
10、优选的,所述旋耕刀片的末端弯曲设置,且弯曲的方向与所述旋耕轴同向,同一所述刀盘上相邻的所述旋耕刀片的末端向相反的方向。
11、优选的,所述耙平组件包括铰接在所述机架尾部的后盖板,所述后盖板倾斜设置,所述后盖板的底端与地面滑动接触;所述后盖板的背面铰接有若干推杆,所述推杆的顶端与所述机架铰接。
12、优选的,所述机架的顶端固接有支撑座,所述支撑座上斜向固接有支撑杆,所述支撑杆伸出所述机架并与所述推杆铰接。
13、与现有技术相比,本实用新型具有如下优点和技术效果:本申请的无人拖拉机的电驱动系统实现了新能源驱动和无人驾驶的结合,取代了传统的柴油拖拉机,低能耗,高效率,同时实现了零排放,加快推进绿色低碳发展,符合我国碳中和的目标;同时无人驾驶的全自动控制也降低了人力成本,提高了工作效率;无人拖拉机的气动系统能自动控制机架的抬高和降低,进而控制深松机构的深松铲的深松深度,同时控制旋耕机构的旋耕深度,可根据不同土地情况调节工作功率与作业深度参数,可实现对土壤的保护性耕作,在减少工作量、降低生产成本的同时,可改善土壤孔隙度,有效减少水土流失,改良和恢复土壤肥力,提高土壤抗侵蚀性,提高地力、改善土地环境,恢复农田生态系统的正常功能,做到农业机械化的绿色发展。
14、本实用新型采用新能源电动拖拉机作为行进动力,以气动系统作为机架抬升动力,这实现了生产作业的“零排放”,同时可调控深松深度与旋耕机构运转角度与速度,可适应不同类型的土地及耕作要求,可根据具体土地情况进行参数调节,实现保护性耕作,这使得本实用新型有着极大的市场优越性和极大的市场推广价值。
技术特征:
1.一种无人驾驶深松免耕机组,其特征在于,包括:
2.根据权利要求1所述的无人驾驶深松免耕机组,其特征在于:所述深松铲(31)包括弯曲设置的主体(32),所述主体(32)朝向所述无人拖拉机(1)弯曲;所述主体(32)的底端固接有铲齿(33);若干所述铲翼(34)对称固接在所述主体(32)的两侧。
3.根据权利要求2所述的无人驾驶深松免耕机组,其特征在于:所述铲翼(34)为弯折的直角形,所述铲翼(34)的一直角边与所述主体(32)固接,所述铲翼(34)的另一直角边向远离所述主体(32)的一侧延伸。
4.根据权利要求1所述的无人驾驶深松免耕机组,其特征在于:所述旋耕机构(4)包括转动连接在所述机架(2)上的旋耕轴(41),所述旋耕轴(41)与固定安装在所述机架(2)上的旋耕电机(42)传动连接;所述旋耕轴(41)的外壁固接有若干等间距设置的刀盘(43),所述刀盘(43)上固接有若干轴向等间距设置的旋耕刀片(44)。
5.根据权利要求4所述的无人驾驶深松免耕机组,其特征在于:所述旋耕刀片(44)的末端弯曲设置,且弯曲的方向与所述旋耕轴(41)同向,同一所述刀盘(43)上相邻的所述旋耕刀片(44)的末端向相反的方向。
6.根据权利要求1所述的无人驾驶深松免耕机组,其特征在于:所述耙平组件包括铰接在所述机架(2)尾部的后盖板(45),所述后盖板(45)倾斜设置,所述后盖板(45)的底端与地面滑动接触;所述后盖板(45)的背面铰接有若干推杆(46),所述推杆(46)的顶端与所述机架(2)铰接。
7.根据权利要求6所述的无人驾驶深松免耕机组,其特征在于:所述机架(2)的顶端固接有支撑座(47),所述支撑座(47)上斜向固接有支撑杆(48),所述支撑杆(48)伸出所述机架(2)并与所述推杆(46)铰接。
技术总结
本技术公开一种无人驾驶深松免耕机组,包括无人拖拉机,无人拖拉机包括气动系统和电驱动系统;机架,机架设置在无人拖拉机尾端并固定安装在气动系统上;深松机构,深松机构包括若干阵列固接在机架上的深松铲,深松铲上对称安装有若干铲翼;旋耕机构,旋耕机构固定安装在机架上,且深松机构位于旋耕机构与无人拖拉机之间;旋耕机构的尾端固定安装有耙平组件。本技术采用新能源无人拖拉机作为行进动力,实现了生产作业的“零排放”,同时可调控深松深度与旋耕机构运转角度与速度,可适应不同类型的土地及耕作要求,可根据具体土地情况进行参数调节,实现保护性耕作,这使得本技术有着极大的市场优越性和极大的市场推广价值。
技术研发人员:刘子程,王继伟,李岩凯,王家胜,王其烨,于曰皓
受保护的技术使用者:青岛农业大学
技术研发日:20230316
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!