刀盘装置及割草机器人的制作方法
本技术涉及自动行走设备领域,尤其涉及一种刀盘装置及割草机器人。
背景技术:
1、割草机器人等自动行走设备是一种在设定区域内自主移动和执行割草任务的自动工作设备。现有割草机器人的刀盘一般采用高度可调节的设计,以满足用户对草坪不同高度的需求。目前,刀盘高度的调节只能调节至几个特定数值,无法对刀盘高度进行连续调节,进而无法提升对草坪的修剪精度。
技术实现思路
1、基于此,有必要提供一种刀盘装置及割草机器人,旨在解决现有割草机器人的刀盘高度无法连续调节的技术问题。
2、为了解决上述技术问题,本实用新型采用的技术方案一为:
3、刀盘装置,包括:
4、安装座;
5、刀盘组件,活动连接于所述安装座;
6、传动件,活动连接于所述安装座;
7、驱动单元,通过所述传动件驱动所述刀盘组件相对所述安装座移动,以改变所述刀盘组件的高度;及
8、光栅编码器,包括光栅和第一传感器,所述光栅和所述第一传感器中的一者设于所述安装座,另一者设于所述传动件。
9、在所述刀盘装置的一些实施例中,所述光栅固设于所述传动件上,所述第一传感器设于所述安装座上。
10、在所述刀盘装置的一些实施例中,所述光栅设于所述安装座上,所述第一传感器固设于所述传动件上。
11、在所述刀盘装置的一些实施例中,所述安装座包括本体和安装架,所述传动件夹持于所述本体和所述安装架之间,并分别与所述本体和所述安装架旋转连接。
12、在所述刀盘装置的一些实施例中,所述本体上设有第一止转部,所述安装架上设有第二止转部,所述第一止转部和所述第二止转部在所述传动件的旋转平面内止转连接。
13、在所述刀盘装置的一些实施例中,所述安装座上设有第二传感器,所述刀盘组件上设有触发部,所述触发部能够随所述刀盘组件相对所述安装座移动,以触发所述第二传感器标记所述刀盘组件的位置。
14、在所述刀盘装置的一些实施例中,所述安装座上设有止挡部,所述刀盘组件上设有限位部,在所述第二传感器失效的情况下,所述限位部抵接所述止挡部,以阻挡所述刀盘组件继续向上移动。
15、在所述刀盘装置的一些实施例中,所述刀盘组件包括连接件、连接架和刀盘,所述连接件活动连接于所述安装座,所述连接架设于所述连接件背离所述安装座的一侧,所述刀盘转动连接于所述连接架上。
16、在所述刀盘装置的一些实施例中,所述传动件与所述安装座旋转连接,所述驱动单元能够驱动所述传动件相对所述安装座旋转,以通过所述传动件驱动所述刀盘组件相对所述安装座移动。
17、为了解决上述技术问题,本实用新型采用的技术方案二为:
18、割草机器人,包括:
19、机器人本体;及
20、如上所述的刀盘装置,所述刀盘装置设于所述机器人本体上。
21、实施本实用新型实施例,将具有如下有益效果:
22、上述方案的刀盘装置应用装备于割草机器人中,除了使割草机器人具备极佳的割草效能之外,其自身还具备连续调节刀盘组件高度的能力,提升对草坪的修剪精度。具体而言,该刀盘装置包括安装座、活动连接于安装座上的刀盘组件、传动件、驱动单元及包括光栅和第一传感器的光栅编码器。其中,驱动单元能够通过传动件驱动刀盘组件相对安装座移动,以改变刀盘组件的高度。同时,光栅和第一传感器分别设置在安装座和传动件上,能够连续测量安装座和传动件的相对位移,进而使得驱动单元能够通过光栅编码器测量的位移数据,具备连续调节刀盘组件高度的能力。同时,利用光栅编码器的测量精度高的特点,实现刀盘组件高度的精度调节,缩小割草机器人的各修剪尺寸中相邻草坪高度尺寸的间隔,进而提升对草坪的修剪精度。
技术特征:
1.刀盘装置(20),其特征在于,包括:
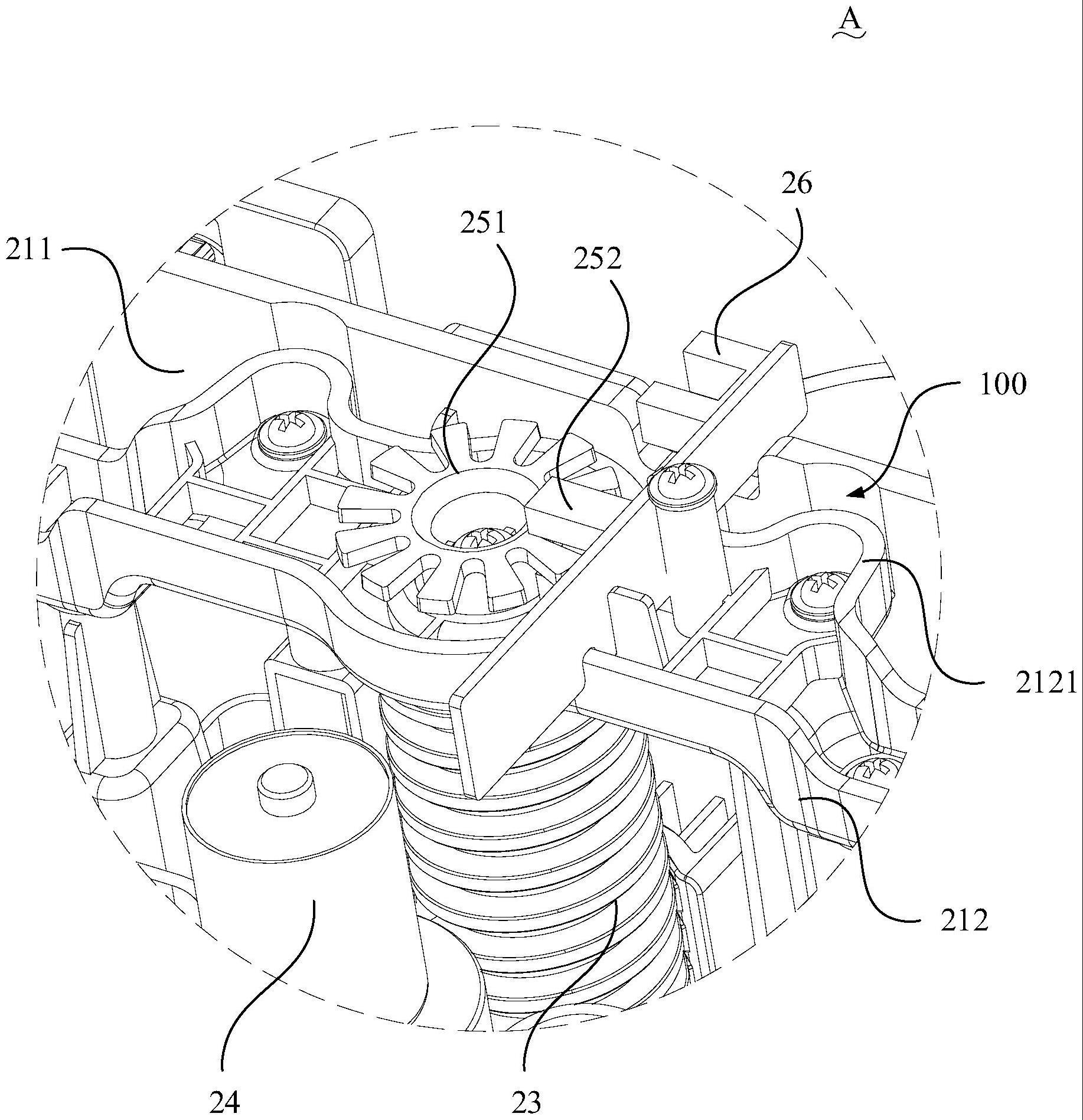
2.根据权利要求1所述的刀盘装置(20),其特征在于,所述光栅(251)固设于所述传动件(23)上,所述第一传感器(252)设于所述安装座(21)上。
3.根据权利要求1所述的刀盘装置(20),其特征在于,所述光栅(251)设于所述安装座(21)上,所述第一传感器(252)固设于所述传动件(23)上。
4.根据权利要求1所述的刀盘装置(20),其特征在于,所述安装座(21)包括本体(211)和安装架(212),所述传动件(23)夹持于所述本体(211)和所述安装架(212)之间,并分别与所述本体(211)和所述安装架(212)旋转连接。
5.根据权利要求4所述的刀盘装置(20),其特征在于,所述本体(211)上设有第一止转部(100),所述安装架(212)上设有第二止转部(2121),所述第一止转部(100)和所述第二止转部(2121)在所述传动件(23)的旋转平面内止转连接。
6.根据权利要求1所述的刀盘装置(20),其特征在于,所述安装座(21)上设有第二传感器(26),所述刀盘组件(22)上设有触发部(27),所述触发部(27)能够随所述刀盘组件(22)相对所述安装座(21)移动,以触发所述第二传感器(26)标记所述刀盘组件(22)的位置。
7.根据权利要求6所述的刀盘装置(20),其特征在于,所述安装座(21)上设有止挡部(28),所述刀盘组件(22)上设有限位部(29),在所述第二传感器(26)失效的情况下,所述限位部(29)抵接所述止挡部(28),以阻挡所述刀盘组件(22)继续向上移动。
8.根据权利要求1所述的刀盘装置(20),其特征在于,所述刀盘组件(22)包括连接件(221)、连接架(222)和刀盘(223),所述连接件(221)活动连接于所述安装座(21),所述连接架(222)设于所述连接件(221)背离所述安装座(21)的一侧,所述刀盘(223)转动连接于所述连接架(222)上。
9.根据权利要求1至8任一项所述的刀盘装置(20),其特征在于,所述传动件(23)与所述安装座(21)旋转连接,所述驱动单元(24)能够驱动所述传动件(23)相对所述安装座(21)旋转,以通过所述传动件(23)驱动所述刀盘组件(22)相对所述安装座(21)移动。
10.割草机器人,其特征在于,包括:
技术总结
本技术实施例公开了一种刀盘装置及割草机器人,涉及自动行走设备领域。该刀盘装置包括安装座、活动连接于安装座上的刀盘组件、传动件、驱动单元及包括光栅和第一传感器的光栅编码器。其中,驱动单元能够通过传动件驱动刀盘组件相对安装座移动,以改变刀盘组件的高度。同时,光栅和第一传感器分别设置在安装座和传动件上,能够连续测量安装座和传动件的相对位移,进而使得驱动单元能够通过光栅编码器测量的位移数据,具备连续调节刀盘组件高度的能力。同时,利用光栅编码器的测量精度高的特点,实现刀盘组件高度的精度调节,缩小割草机器人的各修剪尺寸中相邻草坪高度尺寸的间隔,进而提升对草坪的修剪精度。
技术研发人员:李文超,李少海,李昂,郭盖华,周伟
受保护的技术使用者:深圳乐动机器人股份有限公司
技术研发日:20230324
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!