履带式割草无人车
本技术涉及无人车割草领域,具体涉及一种履带式割草无人车。
背景技术:
1、现有技术中割草车多采用轮式割草车,然而面对一些泥泞地区、山区等复杂环境,履带式割草车有很大的优势,履带式设计提高了越障能力、地形适应能力,可原地转弯的强度,可以适应多种工作场地,但现有技术的履带结构只有行进作用,功能单一,此外,在切割主要农作物旁边的杂草时很难避免伤害中间的主要农作物,所以发明一种适用多场地的割草无人车显得尤为重要。
技术实现思路
1、本实用新型要解决的技术问题是提供履带式割草无人车,旨在解决割草车在履带式前进的同时进行割草工作,在切割主要农作物旁边的杂草时不伤害中间的主要农作物的问题。
2、为解决上述技术问题,本实用新型所采用的技术方案如下:
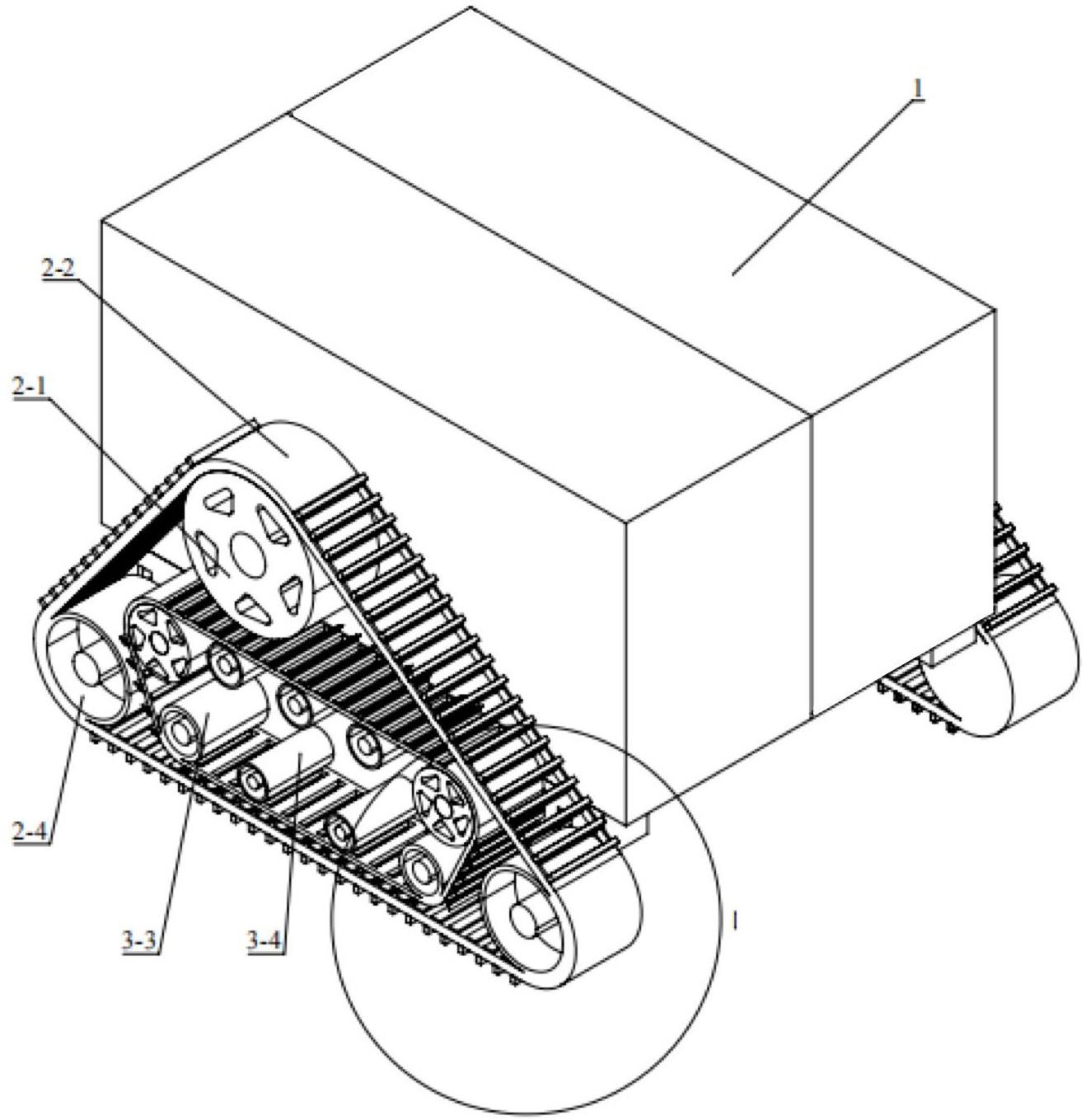
3、履带式割草无人车,其关键技术在于:包括履带模块和差速割草模块;所述履带模块包括驱动履带齿轮、履带条、履带镂空板、履带副齿轮、驱动履带电机,所述驱动履带电机带动驱动履带齿轮转动,所述驱动履带齿轮通过履带条带动履带副齿轮转动,所述履带条上设有镂空状的履带镂空板;
4、所述差速割草模块由割草主齿轮和割草驱动电机、割草履带条、割草副齿轮、传递齿轮和割草刀片组成,所述割草驱动电机带动割草主齿轮转动,所述割草主齿轮通过割草履带条带动割草副齿轮和传递齿轮转动,所述割草履带条为镂空状,所述割草履带条上设有割草刀片;
5、所述驱动履带电机的转速大于割草驱动电机的转速,形成速度差。
6、优选地,包括定位模块。
7、优选地,所述定位模块为电池集装箱,所述电池集装箱包括超声波测距装置和电池组,所述超声波测距装置包括超声波发射装置和超声波接收装置,所述超声波发射装置和超声波接收装置安装在电池集装箱内部,通过接收到超声波的时间结合超声波的传播速度通过特征法计算出目标点与车身的距离。
8、优选地,所述定位模块还包括rtk定位装置。
9、优选地,包括杂草回收模块。
10、优选地,所述杂草回收模块由车厢和抽屉式门组成。
11、优选地,所述杂草回收模块还包括伸缩转换器,所述伸缩转换器包括伸缩杆和伸缩调节控制器,所述伸缩调节控制器控制伸缩杆伸缩。
12、优选地,所述车厢和定位模块之间设有隔离板。
13、优选地,包括强风吸草模块,所述强风吸草模块包括吸板、吸口和强风电机,所述吸口设在吸板上,所述吸板内侧壁设有强风电机,所述吸板与车厢固定连接。
14、优选地,所述履带式割草无人车两侧分别设有履带模块,所述履带模块中驱动履带电机的转速为独立控制。
15、本实用新型与现有技术相比,所取得的技术进步在于:
16、本实用新型通过控制电机转速,使驱动割草电机的速度远远大于履带电机,形成速度差,在杂草通过履带镂空板的镂空口进入差速割草模块后,杂草迅速被履带刀片割断,实现在履带式前进的过程中,同时进行割草工作,通过履带模块与差速割草模块的结合,保证在切割主要农作物旁边的杂草时能够保留中间的主要农作物。
17、本实用新型通过接收到超声波的时间结合超声波的传播速度通过特征法计算出目标点与车身的距离,再结合rtk定位装置避免接收死区和多径效应的问题,达到精准定位。
18、本实用新型通过强风吸草模块将差速割草模块内的杂草碎片吸入杂草回收模块的车厢内,完成对杂草的回收,通过伸缩转换器调整车厢的宽度和容量,在需要收集大量杂草时增大宽度,一次性回收更多的杂草。
技术特征:
1.履带式割草无人车,其特征在于:包括履带模块和差速割草模块;
2.根据权利要求1所述的履带式割草无人车,其特征在于:包括定位模块。
3.根据权利要求2所述的履带式割草无人车,其特征在于:所述定位模块为电池集装箱,所述电池集装箱包括超声波测距装置和电池组,所述超声波测距装置包括超声波发射装置和超声波接收装置,所述超声波发射装置和超声波接收装置安装在电池集装箱内部,通过接收到超声波的时间结合超声波的传播速度通过特征法计算出目标点与车身的距离。
4.根据权利要求3所述的履带式割草无人车,其特征在于:所述定位模块还包括rtk定位装置。
5.根据权利要求2所述的履带式割草无人车,其特征在于:包括杂草回收模块。
6.根据权利要求5所述的履带式割草无人车,其特征在于:所述杂草回收模块由车厢和抽屉式门组成。
7.根据权利要求5所述的履带式割草无人车,其特征在于:所述杂草回收模块还包括伸缩转换器,所述伸缩转换器包括伸缩杆和伸缩调节控制器,所述伸缩调节控制器控制伸缩杆伸缩。
8.根据权利要求6所述的履带式割草无人车,其特征在于:所述车厢和定位模块之间设有隔离板。
9.根据权利要求1所述的履带式割草无人车,其特征在于:包括强风吸草模块,所述强风吸草模块包括吸板、吸口和强风电机,所述吸口设在吸板上,所述吸板内侧壁设有强风电机,所述吸板与车厢固定连接。
10.根据权利要求1所述的履带式割草无人车,其特征在于:所述履带式割草无人车两侧分别设有履带模块,每侧的所述履带模块中驱动履带电机的转速为独立控制。
技术总结
本技术涉及无人车割草领域,具体公开了履带式割草无人车,包括履带模块和差速割草模块,所述履带模块包括驱动履带齿轮、履带条、履带镂空板、履带副齿轮、驱动履带电机,所述驱动履带电机带动驱动履带齿轮、履带副齿轮和履带条转动,所述履带条上设有履带镂空板,所述差速割草模块由割草主齿轮和割草驱动电机、割草履带条、割草副齿轮和传递齿轮组成,所述割草驱动电机带动割草主齿轮、割草副齿轮、传递齿轮和割草履带条转动,所述割草履带条上设有割草刀片,所述驱动履带电机的转速大于割草驱动电机的转速,形成速度差。本技术可实现在履带式前进的同时进行割草工作,在切割主要农作物旁边的杂草时保留中间的主要农作物。
技术研发人员:张岩,宋佳蕊,边佳俊,冯肖瑶,张洪宾,刘国成
受保护的技术使用者:河北科技大学
技术研发日:20230425
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!