一种自适应压力-速度的深松旋耕施肥机
本技术涉及农机,特别涉及一种自适应压力-速度的深松旋耕施肥机。
背景技术:
1、深松旋耕施肥机作为常见的农业机械之一,虽然满足了多功能的需要,但在实际工作环境中,深松旋耕施肥机整机质量较重,受到的作用力较大,需要大功率的拖拉机提供动力,耗能较大;深松铲布局方式单一,秸秆拥堵严重;拖拉机以不同行驶速度施肥时,需人为调节电机转速保证施肥量的均匀性,投入时间成本较高。
技术实现思路
1、为了克服上述技术问题,本实用新型提供了一种自适应压力-速度的深松旋耕施肥机。
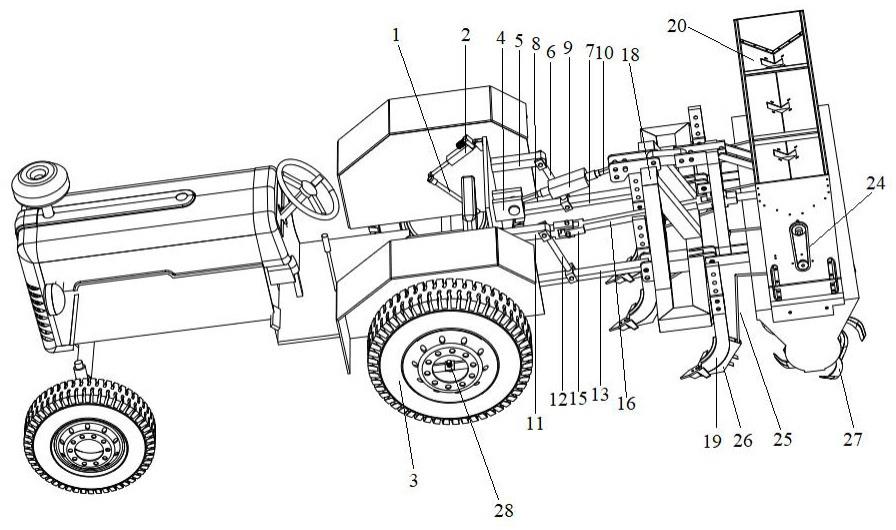
2、本实用新型技术方案为:一种自适应压力-速度的深松旋耕施肥机,包括液压提升手柄、电动推杆、拖拉机左后轮胎、悬挂器、右提升臂、右提升杆、右下拉杆、前吊环螺栓、拉压传感器、后吊环螺栓、左提升臂、左提升杆、左下拉杆、拖拉机动力输出轴、万向节、旋耕机主动轴、变速箱、机架、深松铲、施肥箱、施肥盒、六方轴、电机、链轮、施肥管、分层施肥器、旋耕犁、霍尔传感器,所述拉压传感器通过后吊环螺栓连接机架,所述霍尔传感器通过螺栓连接拖拉机左后轮胎。
3、进一步的,所述电动推杆通过固定装置连接液压提升手柄。
4、进一步的,所述拖拉机动力输出轴通过万向节连接旋耕机主动轴,所述旋耕机主动轴连接变速箱。
5、进一步的,所述拉压传感器一端通过前吊环螺栓旋转连接悬挂器,所述拉压传感器另一端通过后吊环螺栓旋转连接机架;所述左提升臂通过螺栓旋转连接左提升杆,所述左提升杆通过螺栓旋转连接左下拉杆,所述右提升臂通过螺栓旋转连接右提升杆,所述右提升杆通过螺栓旋转连接右下拉杆,所述左下拉杆、右下拉杆分别通过螺栓旋转连接机架。
6、进一步的,所述深松铲通过螺栓连接机架,所述分层施肥器焊接在深松铲上。
7、进一步的,所述电机带动链轮转动,所述链轮转动带动六方轴转动,肥料由所述施肥箱进入施肥盒,经六方轴旋转搅动沿着施肥管进入分层施肥器。
8、进一步的,所述旋耕犁通过螺栓连接机架,所述旋耕犁上端安装施肥箱。
9、进一步的,通过拉压传感器检测当前作业过程中机架受到的作用力,将当前作用力信息传输到stm32单片机中并与提前设定的额定值进行比较,计算出当前工作过程中机架所需升降的高度;stm32单片机发出信号,控制电动推杆的伸缩使得液压提升手柄下压或上提,进而调整机架的升降。
10、进一步的,通过霍尔传感器检测当前作业过程中拖拉机的行驶速度,将当前拖拉机速度信息传输到stm32单片机中并与提前设定的额定值进行比较,计算出当前行驶速度条件下六方轴所需的转速;stm32单片机发出信号,控制电机转速提高或降低使得六方轴转速提高或降低,进而保证在不同车速条件下肥料从施肥盒落入施肥管的均匀性。
11、本实用新型的有益效果为:
12、本实用新型通过拉压传感器检测深松旋耕施肥机作业过程中机架受到的作用力,将该作用力数据传输到stm32单片机与提前设定的额定值进行比较,以此判断机架应该上升或下降;stm32单片机发出信号,控制电动推杆的伸缩使得液压提升手柄下压或上提,进而调整机架的升降,实现不同作用力条件下对机架升降的闭环控制。
13、本实用新型通过霍尔传感器检测深松旋耕施肥机作业过程中拖拉机的行驶速度,将行驶速度值传输到stm32单片机与提前设定的额定值进行比较,以此判断六方轴应该提高转速或降低转速;stm32单片机发出信号,控制电机的转速使得六方轴的转速提高或降低,进而保证施肥量的均匀性,实现不同行驶速度条件下对施肥量均匀性的闭环控制。
14、本实用新型对机架采取多梁布局方式,将深松铲安装在两排横梁上,进行前二后二布局,避免单一横梁应力集中问题的同时,有效地减少了秸秆拥堵现象。
技术特征:
1.一种自适应压力-速度的深松旋耕施肥机,包括液压提升手柄、电动推杆、拖拉机左后轮胎、悬挂器、右提升臂、右提升杆、右下拉杆、前吊环螺栓、拉压传感器、后吊环螺栓、左提升臂、左提升杆、左下拉杆、拖拉机动力输出轴、万向节、旋耕机主动轴、变速箱、机架、深松铲、施肥箱、施肥盒、六方轴、电机、链轮、施肥管、分层施肥器、旋耕犁、霍尔传感器,其特征在于,所述拉压传感器通过后吊环螺栓连接机架,所述霍尔传感器通过螺栓连接拖拉机左后轮胎。
2.如权利要求1所述的一种自适应压力-速度的深松旋耕施肥机,其特征在于所述电动推杆通过固定装置连接液压提升手柄。
3.如权利要求1所述的一种自适应压力-速度的深松旋耕施肥机,其特征在于所述拖拉机动力输出轴通过万向节连接旋耕机主动轴,所述旋耕机主动轴连接变速箱。
4.如权利要求1所述的一种自适应压力-速度的深松旋耕施肥机,其特征在于所述拉压传感器一端通过前吊环螺栓旋转连接悬挂器,所述拉压传感器另一端通过后吊环螺栓旋转连接机架;所述左提升臂通过螺栓旋转连接左提升杆,所述左提升杆通过螺栓旋转连接左下拉杆,所述右提升臂通过螺栓旋转连接右提升杆,所述右提升杆通过螺栓旋转连接右下拉杆,所述左下拉杆、右下拉杆分别通过螺栓旋转连接机架。
5.如权利要求1所述的一种自适应压力-速度的深松旋耕施肥机,其特征在于所述深松铲通过螺栓连接机架,所述分层施肥器焊接在深松铲上。
6.如权利要求1所述的一种自适应压力-速度的深松旋耕施肥机,其特征在于所述电机带动链轮转动,所述链轮转动带动六方轴转动,肥料由所述施肥箱进入施肥盒,经六方轴旋转搅动沿着施肥管进入分层施肥器。
7.如权利要求1所述的一种自适应压力-速度的深松旋耕施肥机,其特征在于所述旋耕犁通过螺栓连接机架,所述旋耕犁上端安装施肥箱。
8.如权利要求1所述的一种自适应压力-速度的深松旋耕施肥机,其特征在于通过拉压传感器检测当前作业过程中机架受到的作用力,将当前作用力信息传输到stm32单片机中并与提前设定的额定值进行比较,计算出当前工作过程中机架所需升降的高度;stm32单片机发出信号,控制电动推杆的伸缩使得液压提升手柄下压或上提,进而调整机架的升降。
9.如权利要求1所述的一种自适应压力-速度的深松旋耕施肥机,其特征在于通过霍尔传感器检测当前作业过程中拖拉机的行驶速度,将当前拖拉机速度信息传输到stm32单片机中并与提前设定的额定值进行比较,计算出当前行驶速度条件下六方轴所需的转速;stm32单片机发出信号,控制电机转速提高或降低使得六方轴转速提高或降低,进而保证在不同车速条件下肥料从施肥盒落入施肥管的均匀性。
技术总结
本技术公开了一种自适应压力‑速度的深松旋耕施肥机,属于农机技术领域,本技术包括拖拉机左后轮胎、机架、后吊环螺栓、液压提升手柄、拉压传感器以及霍尔传感器,其特征在于,所述拉压传感器通过后吊环螺栓连接机架,所述霍尔传感器通过螺栓连接拖拉机左后轮胎,本技术设计巧妙,可根据拉压传感器数据控制液压提升手柄实时调整机架高度,保证拖拉机的行驶稳定性;根据霍尔传感器数据控制电机实时调整六方轴转速,保证施肥量的均匀性。
技术研发人员:赵国,曹树坤,赵鑫鑫,徐圣威,邢梦杰,王品正
受保护的技术使用者:济南大学
技术研发日:20230426
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!