一种羊肚菌采摘多机器人固定支架
本技术属于羊肚菌采摘,具体涉及一种羊肚菌采摘多机器人固定支架。
背景技术:
1、羊肚菌是羊肚菌科、羊肚菌属真菌,菌盖近球形,卵形至椭圆形,高可达10厘米,顶端钝圆,表面有似羊肚状的凹坑,凹坑不定蛋壳色至淡黄褐色,棱纹色较浅,柄近圆柱形,无色,侧丝顶端膨大,体轻,质酥脆。
2、在羊肚菌采摘过程中会用到采摘机器人,降低人员劳动力投入,现有的部分羊肚菌采摘机器人,机械臂的采摘端在经过长时间的使用后,受重力和零件磨损影响,会产生下垂,导致采摘时的抓取位置产生偏差,较为不便。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种羊肚菌采摘多机器人固定支架,以解决上述背景技术中提出的现有的部分羊肚菌采摘机器人,机械臂的采摘端在经过长时间的使用后,受重力和零件磨损影响,会产生下垂,导致采摘时的抓取位置产生偏差,较为不便的问题。
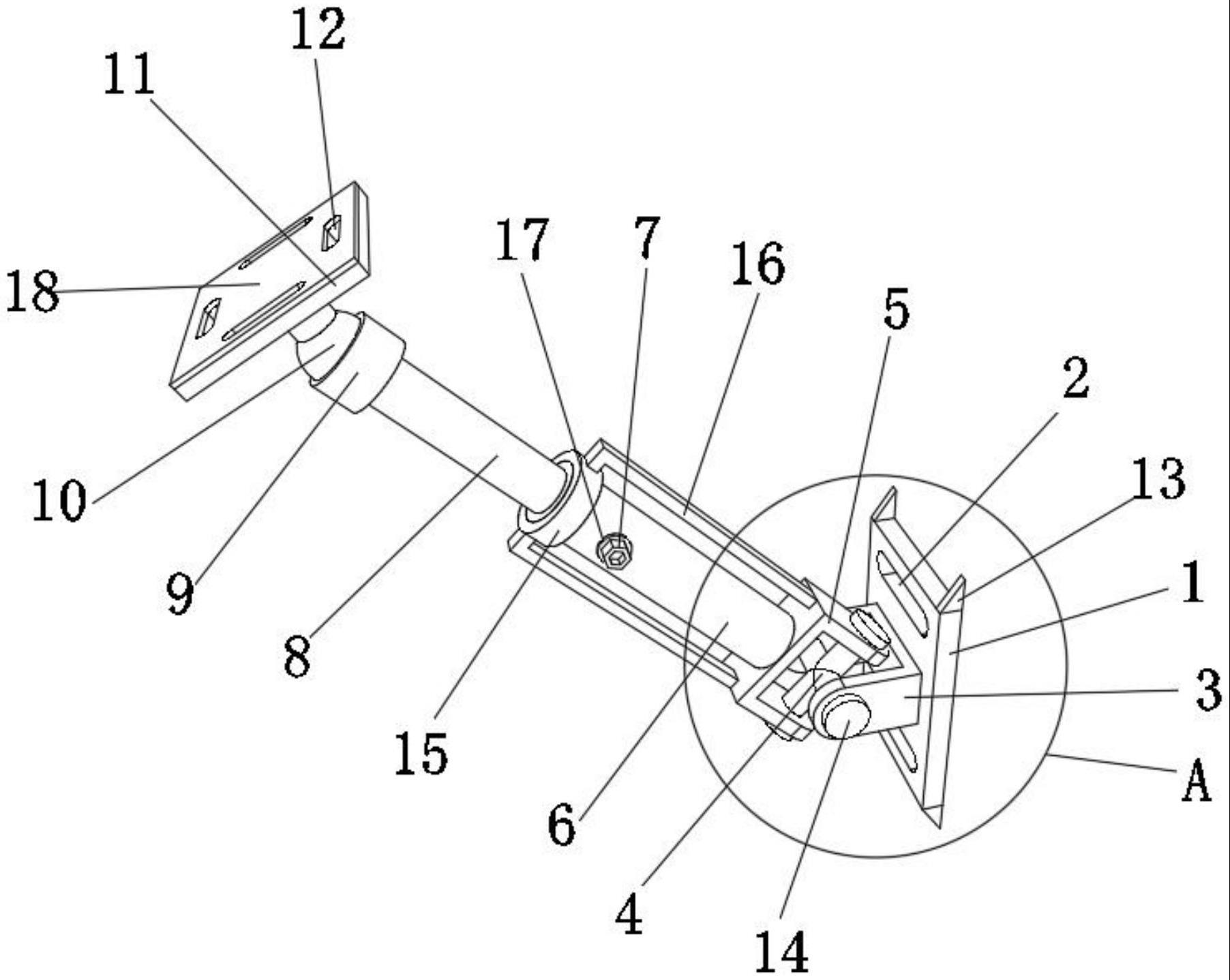
2、为实现上述目的,本实用新型提供如下技术方案:一种羊肚菌采摘多机器人固定支架,包括基板,所述基板内侧对称设置有第一限位孔,所述基板一侧固定连接有第一转接块,所述第一转接块内侧转动连接有万向结,所述万向结外侧转动连接有第二转接块,所述第二转接块一侧固定连接有套筒,所述套筒一侧螺纹连接有限位螺杆,所述套筒内侧滑动连接有滑杆,所述滑杆顶部固定连接有基座,所述基座内侧转动连接有阻尼结构,所述阻尼结构顶部固定连接有顶板,所述顶板内侧对称设置有第二限位孔。
3、优选的,所述第一限位孔和第二限位孔均为u形结构。
4、优选的,所述顶板顶部固定连接有缓冲垫,所述缓冲垫为柔性材质,所述顶板底部固定连接有阻尼结构。
5、优选的,所述限位螺杆外侧活动连接有垫片,所述限位螺杆一端的外侧螺纹连接有套筒。
6、优选的,所述套筒外侧固定连接有外环,所述外环一侧固定连接有支撑板,所述支撑板对称设置有两个,所述支撑板一侧均固定连接有第二转接块。
7、优选的,所述万向结一端固定连接有堵头,所述堵头对称设置有若干个。
8、优选的,所述基板一侧固定连接有脚架,所述脚架对称设置有若干个。
9、优选的,所述套筒和滑杆外表面均设置有抗氧化涂层。
10、与现有技术相比,本实用新型提供了一种羊肚菌采摘多机器人固定支架,具备以下有益效果:
11、1、本实用新型通过设置套筒,套筒底部固定连接有第二转接块,第二转接块内侧转动连接有万向结,万向结外侧转动连接有第一转接块,第一转接块一侧固定连接有基板,套筒一侧螺纹连接有限位螺杆,套筒内侧滑动连接有滑杆,滑杆顶端固定连接有基座,基座内侧转动连接有阻尼结构,阻尼结构顶部固定连接有顶板,将基板通过第一限位孔固定在羊肚菌采摘机器人的主体结构上,滑动滑杆到所需长度,将顶板通过第二限位孔和采摘端的底部进行连接,顺时针旋转限位螺杆对滑杆的位置进行固定,羊肚菌采摘多机器人的采摘端在经过长时间使用后,受重力和零件磨损影响,产生下垂时,通过基板对采摘端在垂直位置上进行固定,经顶板对采摘端进行托举,能够较为有效的降低羊肚菌采摘机器人的下垂量,有效保障采摘时的精确度;
12、2、本实用新型通过设置垫片,垫片内侧活动连接有限位螺杆,限位螺杆一端的外侧螺纹连接由套筒,套筒内侧滑动连接有滑杆,能够有效降低限位螺杆长时间使用后所产生的松动幅度;
13、3、本实用新型通通过设置脚架,脚架一侧均固定连接有基板,能够有效降低基板长时间使用后所产生的下垂量。
14、该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本实用新型结构科学合理,使用安全方便,为人们提供了很大的帮助。
技术特征:
1.一种羊肚菌采摘多机器人固定支架,包括基板(1),其特征在于:所述基板(1)内侧对称设置有第一限位孔(2),所述基板(1)一侧固定连接有第一转接块(3),所述第一转接块(3)内侧转动连接有万向结(4),所述万向结(4)外侧转动连接有第二转接块(5),所述第二转接块(5)一侧固定连接有套筒(6),所述套筒(6)一侧螺纹连接有限位螺杆(7),所述套筒(6)内侧滑动连接有滑杆(8),所述滑杆(8)顶部固定连接有基座(9),所述基座(9)内侧转动连接有阻尼结构(10),所述阻尼结构(10)顶部固定连接有顶板(11),所述顶板(11)内侧对称设置有第二限位孔(12)。
2.根据权利要求1所述的一种羊肚菌采摘多机器人固定支架,其特征在于:所述第一限位孔(2)和第二限位孔(12)均为u形结构。
3.根据权利要求1所述的一种羊肚菌采摘多机器人固定支架,其特征在于:所述顶板(11)顶部固定连接有缓冲垫(18),所述缓冲垫(18)为柔性材质,所述顶板(11)底部固定连接有阻尼结构(10)。
4.根据权利要求1所述的一种羊肚菌采摘多机器人固定支架,其特征在于:所述限位螺杆(7)外侧活动连接有垫片(17),所述限位螺杆(7)一端的外侧螺纹连接有套筒(6)。
5.根据权利要求1所述的一种羊肚菌采摘多机器人固定支架,其特征在于:所述套筒(6)外侧固定连接有外环(15),所述外环(15)一侧固定连接有支撑板(16),所述支撑板(16)对称设置有两个,所述支撑板(16)一侧均固定连接有第二转接块(5)。
6.根据权利要求1所述的一种羊肚菌采摘多机器人固定支架,其特征在于:所述万向结(4)一端固定连接有堵头(14),所述堵头(14)对称设置有若干个。
7.根据权利要求1所述的一种羊肚菌采摘多机器人固定支架,其特征在于:所述基板(1)一侧固定连接有脚架(13),所述脚架(13)对称设置有若干个。
8.根据权利要求1所述的一种羊肚菌采摘多机器人固定支架,其特征在于:所述套筒(6)和滑杆(8)外表面均设置有抗氧化涂层。
技术总结
本技术公开了一种羊肚菌采摘多机器人固定支架,包括基板,所述基板内侧对称设置有第一限位孔,所述基板一侧固定连接有第一转接块,所述第一转接块内侧转动连接有万向结,所述万向结外侧转动连接有第二转接块,将基板通过第一限位孔固定在羊肚菌采摘机器人的主体结构上,滑动滑杆到所需长度,将顶板通过第二限位孔和采摘端的底部进行连接,顺时针旋转限位螺杆对滑杆的位置进行固定,羊肚菌采摘多机器人的采摘端在经过长时间使用后,受重力和零件磨损影响,产生下垂时,通过基板对采摘端在垂直位置上进行固定,经顶板对采摘端进行托举,能够较为有效的降低羊肚菌采摘机器人的下垂量,有效保障采摘时的精确度。
技术研发人员:王锐,陈鸿,庞雄斌,廖剑,卢泽民,高星星,谢敬波,罗欣,吕程辉,马晓龙
受保护的技术使用者:武汉市农业科学院
技术研发日:20230427
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!