切割组件及割草机器人的制作方法
本申请涉及割草设备,特别涉及一种切割组件和含有该切割组件的割草机器人。
背景技术:
1、割草机是园林作业常用的设备之一,随着机器人在各行业的发展,能实现自动割草作业的割草机器人也逐渐发展起来。割草机器人一般包括机身、切割组件和行走装置,切割组件通常包括刀盘、电机和用于割草的刀片,通过电机转动带动安装在刀盘上的刀片高速旋转实现切割草的功能,而行走装置一般包括驱动传动机构和驱动轮,驱动传动机构产生驱动力并将驱动力传递到驱动轮以驱使其产生运动,从而实现割草机器人在草地或草坪上自行移动,完成预定范围内的割草任务。
2、作为割草机器人的关键构件之一,刀片的状态关系到割草作业是否能顺利完成。传统的人工割草机,其操作员一般能实时根据现场割草情况观察到割草机的异常,从而及时检查刀片是否存在移位、断裂、被刀盘等部件卡住之类的异常,并适时进行必要的更换刀片或刀盘维修等操作以排除异常或故障。另外还有一些割草机器人配置了红外检测器,用于检测刀片是否存在异常,然而在割草机器人所在的环境中,存在很多的草屑、泥水等物体,尤其在刀盘、刀片附近会聚集较多的该类物体,从而弄脏红外检测器的发射接收窗口,造成红外检测器的检测失效,也就导致刀片检测结构有误,进一步影响割草机器人的后续工作。另外,红外检测器容易受到自然光的干扰,对应输出的光检测信号不能准确反映出刀片本身的状态,影响刀片状态检测的准确性。
技术实现思路
1、本申请实施例的目的之一在于提供一种适于割草机器人工作环境并提升刀片异常检测准确度的切割组件,以解决现有技术中割草机器人刀片检测易受到环境影响而检测准确度交底的技术问题。
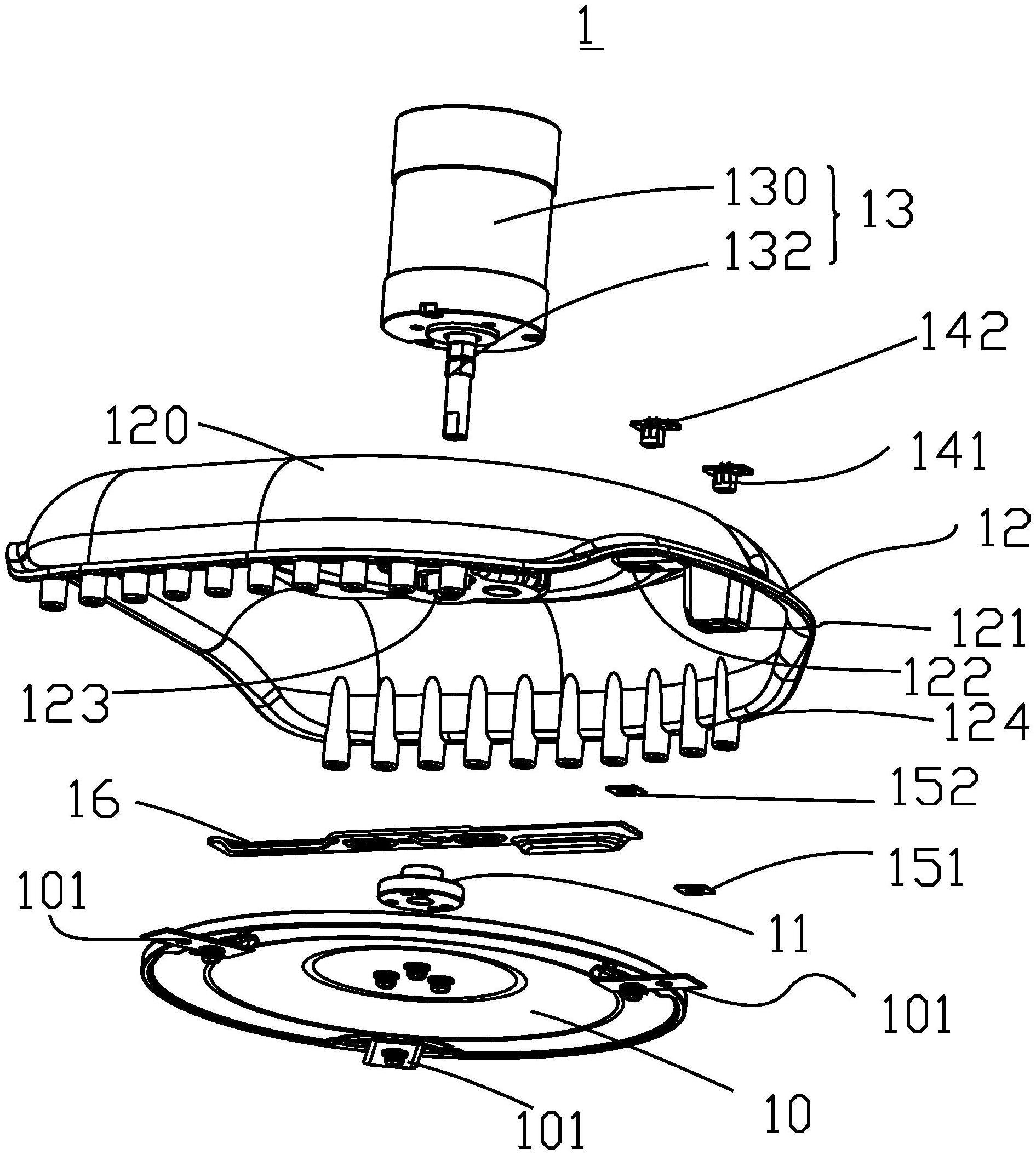
2、一种切割组件,其用于割草机器人,包括:刀盘,其安装有至少一个第一刀片;第一磁体,其安装于所述刀盘,并可使所述第一刀片磁化;驱动单元,传动连接至所述刀盘以驱使所述刀盘旋转;保护罩,其固定于所述刀盘上方;第一磁感应检测模块,其设置在所述保护罩上并对应于所述第一刀片,当所述第一刀片随所述刀盘旋转时,所述第一磁感应检测模块感应所述第一刀片产生的磁力并输出第一刀片检测信号。
3、在一些实施例中,所述第一刀片与所述第一磁体通过第一螺钉安装到所述刀盘,且所述第一磁体紧贴所述第一刀片。
4、在一些实施例中,所述第一磁体为环形。
5、在一些实施例中,所述切割组件进一包括第二刀片,所述第二刀片与所述驱动单元传动连接,并与所述刀盘同轴旋转。
6、在一些实施例中,所述第一刀片为割草刀片,所述第二刀片为碎草刀,且所述第二刀片位于所述保护罩与所述刀盘之间。
7、在一些实施例中,所述切割组件进一步包括第二磁体和第二磁感应检测模块,所述第二磁体固定于所述第二刀片,所述第二磁感应检测模块固定于所述保护罩。
8、在一些实施例中,所述保护罩包括第一安装部和第二安装部,所述第一安装部和所述第二安装部自所述保护罩的上表面向下凹陷形成,所述第一磁感应检测模块和所述第二磁感应检测模块分别安装在所述第一安装部和所述第二安装部。
9、在一些实施例中,所述第一磁感应检测模块包括霍尔磁开关或者电磁感应器件。
10、本申请的另一个目的,在于提供一种割草机器人,其包括切割组件和主控板,所述切割组件包括:
11、刀盘,其安装有至少一个第一刀片;
12、第一磁体,其安装于所述刀盘,并可使所述第一刀片磁化;
13、驱动单元,传动连接至所述刀盘以驱使所述刀盘旋转;
14、保护罩,其固定于所述刀盘上方;
15、第一磁感应检测模块,其设置在所述保护罩上并对应于所述第一刀片,当所述第一刀片随所述刀盘旋转时,所述第一磁感应检测模块感应所述第一刀片产生的磁力并输出第一刀片检测信号,所述第一刀片检测信号用于判断所述第一刀片的状态;
16、所述主控板包括主控电路,所述切割组件的第一磁感应检测模块连接至所述主控电路。
17、在一些实施例中,所述主控电路包括比较器和基准参数模块,所述第一磁感应检测模块输出的所述第一刀片检测信号和所述基准参数模块输出的基准参数经过所述比较器输出比较结果,所述比较结果用于表示所述第一刀片是否异常。
18、依据本实用新型实施例的切割组件和割草机器人,其通过的在切割组件的刀盘上安装能使第一刀片磁化的第一磁体,以及在保护罩上设置对应的能检测被磁化的第一刀片所产生磁场及磁场变化的第一磁感应检测模块,通过其输出的第一刀片检测信号可以实现对第一刀片的异常状态监测,而第一磁体不影响第一刀片本身的割草功能,同时第一磁感应检测模块又不受自然光干扰,且其检测结构不受割草机器人工作环境中产生的草屑泥水等脏污物影响,大大提高了割草机器人工作环境的兼容性和对刀片状态检测数据的稳定性。
19、除非另有定义,否则,本文中使用的所有技术和科学术语与本申请所属领域的普通技术人员的通常理解具有相同的含义。
20、在上述各方面中所提及的关于本申请的各种特征和实施方式,视情况而定,在适当变通的情况下可以应用于其他方面。因此,一个方面中的具体特征可以与其他方面中的具体特征适当地进行组合。
21、本申请的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本申请的研究和实践而为本领域的技术人员所理解。
技术特征:
1.一种切割组件,其用于割草机器人,其特征在于,包括:
2.根据权利要求1所述的切割组件,其特征在于,所述第一刀片与所述第一磁体通过第一螺钉安装到所述刀盘,且所述第一磁体紧贴所述第一刀片。
3.根据权利要求2所述的切割组件,其特征在于,所述第一磁体为环形。
4.根据权利要求1所述的切割组件,其特征在于,所述切割组件进一包括第二刀片,所述第二刀片与所述驱动单元传动连接,并与所述刀盘同轴旋转。
5.根据权利要求4所述的切割组件,其特征在于,所述第一刀片为割草刀片,所述第二刀片为碎草刀,且所述第二刀片位于所述保护罩与所述刀盘之间。
6.根据权利要求5所述的切割组件,其特征在于,所述切割组件进一步包括第二磁体和第二磁感应检测模块,所述第二磁体固定于所述第二刀片,所述第二磁感应检测模块固定于所述保护罩。
7.根据权利要求6所述的切割组件,其特征在于,所述保护罩包括第一安装部和第二安装部,所述第一安装部和所述第二安装部自所述保护罩的上表面向下凹陷形成,所述第一磁感应检测模块和所述第二磁感应检测模块分别安装在所述第一安装部和所述第二安装部。
8.根据权利要求1所述的切割组件,其特征在于,所述第一磁感应检测模块包括霍尔磁开关或者电磁感应器件。
9.一种割草机器人,其特征在于,包括切割组件和主控板,所述切割组件是权利要求1-8任意一项所述的切割组件,所述主控板包括主控电路,所述切割组件的第一磁感应检测模块连接至所述主控电路。
10.根据权利要求9所述的割草机器人,其特征在于,所述主控电路包括比较器和基准参数模块,所述第一磁感应检测模块输出的所述第一刀片检测信号和所述基准参数模块输出的基准参数经过所述比较器输出比较结果,所述比较结果用于表示所述第一刀片是否异常。
技术总结
本申请公开了一种割草机器人及其切割组件。本申请提供的切割组件包括刀盘、第一磁体、驱动单元、保护罩和第一磁感应检测模块,其中:刀片安装有至少一个第一刀片;第一磁体安装于所述刀盘,并可使所述第一刀片磁化;驱动单元传动连接至所述刀盘以驱使所述刀盘旋转;保护罩固定于所述刀盘上方;第一磁感应检测模块设置在所述保护罩上并对应于所述第一刀片,当第一刀片随所述刀盘旋转时,第一磁感应检测模块感应第一刀片产生的磁力并输出第一刀片检测信号,第一刀片检测信号用于判断所述第一刀片的状态。本申请的切割组件可以提升割草机器人工作环境的兼容性和刀片状态检测数据的稳定性。
技术研发人员:万桂中,胡岳,周聪,李永清
受保护的技术使用者:长曜创新科技(深圳)有限公司
技术研发日:20230522
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!