一种水下割草机器人的制作方法
本技术涉及割草装置,特别涉及一种水下割草机器人。
背景技术:
1、水产养殖业的逐渐兴起,使得个人养殖户所占有的鱼塘、虾塘和蟹塘等池塘面积逐渐增加,在生产养殖过程中水草的繁殖问题不可忽视,随着水草生长对池底面积的大量覆盖,导致水体含氧量降低,同时鱼类和蟹类极易被大面积的水草缠住,长时间无法脱身则容易由于无法觅食而出现死亡的情况,因此水产养殖过程中需使用相应的割草装置对池底水草进行有效割除,以确保水产养殖工作的正常进行。
2、专利公开号为cn102714969b的发明专利公开了一种新型水下割草机,包括如下部件:作为割草机主体框架的载体;由丝杠和可沿丝杠直线升降的承重钢构成的升降部;设置于承重钢的可旋转的切割动力部;与切割动力部旋转连接、设有切割刀片的切割部;与载体连接的聚草部。该割草机结构简单、操作方便,能够替代人工进行割草,提高了割草效率高,减轻了人工劳动强度,但是,由于水草被割后,仍会漂浮在水面上,需要人工进行打捞,人工劳动强度仍然较大,效率较低。
3、又如,专利公开号为cn110972688b的发明专利公开了一种针对蟹塘水底青苔的高效智控水下割草机,包括内置有电机的控制箱,所述控制箱背面固定连接有用于与船尾连接的安装架,且控制箱的底部固定连接有空心杆的顶端,空心杆内纵向设置有传动杆,且传动杆的顶端延伸至控制箱内与电机的输出端固定连接。该发明通过收集机构只能够实现对青苔的收集,而水体中大量生长的水草才是影响水产养殖的罪魁祸首,该装置只能够对水草进行切割,并不能对其进行打捞,仍需要人工打捞,增加了人工劳动强度,降低了工作效率。
4、基于现有技术中的上述缺陷,亟需设计一种水下割草机器人来解决现有技术中存在的问题。
技术实现思路
1、本实用新型实施例提供了一种能够实现将切割的水草进行自动打捞的水下割草机器人,解决了现有技术中存在的需要人工打捞水草的问题,降低了人工劳动强度,提高了工作效率。
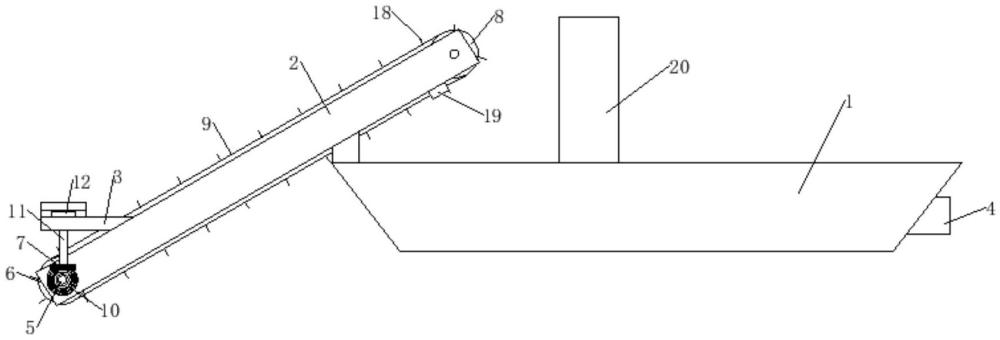
2、为了解决上述技术问题,本实用新型采用以下技术方案:一种水下割草机器人,包括船体,所述船体的前端通过第一支架固定连接有安装架,所述安装架的前端通过第二支架固定连接有固定板,所述固定板上设置有固定锯条,所述安装架的前端设置有电机,所述电机通过控制器与内置电源电性连接,所述电机的输出端固定连接有第一转轴,所述第一转轴上设置有主动辊和主动齿轮,所述安装架的后端转动连接有从动辊,所述主动辊通过传动带与从动辊传动连接,所述主动齿轮啮合有从动齿轮,所述从动齿轮通过第二转轴与固定板转动连接,所述第二转轴的上端穿出固定板,且固定连接有圆盘,所述圆盘上转动连接有偏心连杆,所述偏心连杆的另一端铰接有活动锯条。
3、优选的,所述主动齿轮和从动齿轮均为锥齿轮。
4、优选的,所述固定锯条的上表面设置有滑轨,所述活动锯条的下表面设置有与滑轨相适应的滑槽。
5、优选的,所述传动带的外表面均匀设置有多个隔板。
6、优选的,所述安装架的后端设置有u形刮板。
7、优选的,所述船体上设置有龙门架,所述龙门架上设置有电动伸缩杆,所述电动伸缩杆通过控制器与内置电源电性连接,所述电动伸缩杆的伸缩端设置有压板。
8、优选的,所述水下割草机器人还包括远程遥控装置和设置于船体后端的推进器,所述远程遥控装置用于操作者调整船体的方向和速度;
9、所述远程遥控装置包括控制终端和无线通信模块,所述控制器通过无线通信模块与控制终端信号连接。
10、优选的,所述水下割草机器人还包括识别模块,所述识别模块用于实时处理获取的水草位置数据,所述识别模块包括摄像头及视频解码器,所述摄像头采集的图像通过视频解码器解码后传输给控制器。
11、相对于现有技术,本实用新型通过电机、主动辊、主动齿轮、从动辊、传动带、从动齿轮、圆盘、偏心连杆、固定锯条和活动锯条的配合设置,电机工作会通过第一转轴带动主动辊和主动齿轮转动,主动齿轮通过从动齿轮带动第二转轴和圆盘转动,圆盘通过偏心连杆带动活动锯条相对于固定锯条做往复运动,将水草进行切割,传动带在主动辊和从动辊的摩擦传动作用下转动,将切割的水草送入船体中,实现了水草切割及打捞一体化,降低了人工劳动强度,提高了工作效率。
技术特征:
1.一种水下割草机器人,包括船体(1),其特征在于:所述船体(1)的前端通过第一支架固定连接有安装架(2),所述安装架(2)的前端通过第二支架固定连接有固定板(3),所述固定板(3)上设置有固定锯条(14),所述安装架(2)的前端设置有电机,所述电机通过控制器与内置电源电性连接,所述电机的输出端固定连接有第一转轴(5),所述第一转轴(5)上设置有主动辊(6)和主动齿轮(7),所述安装架(2)的后端转动连接有从动辊(8),所述主动辊(6)通过传动带(9)与从动辊(8)传动连接,所述主动齿轮(7)啮合有从动齿轮(10),所述从动齿轮(10)通过第二转轴(11)与固定板(3)转动连接,所述第二转轴(11)的上端穿出固定板(3),且固定连接有圆盘(12),所述圆盘(12)上转动连接有偏心连杆(13),所述偏心连杆(13)的另一端铰接有活动锯条(15)。
2.根据权利要求1所述的一种水下割草机器人,其特征在于:所述主动齿轮(7)和从动齿轮(10)均为锥齿轮。
3.根据权利要求1所述的一种水下割草机器人,其特征在于:所述固定锯条(14)的上表面设置有滑轨(16),所述活动锯条(15)的下表面设置有与滑轨(16)相适应的滑槽(17)。
4.根据权利要求1所述的一种水下割草机器人,其特征在于:所述传动带(9)的外表面均匀设置有多个隔板(18)。
5.根据权利要求1所述的一种水下割草机器人,其特征在于:所述安装架(2)的后端设置有u形刮板(19)。
6.根据权利要求1所述的一种水下割草机器人,其特征在于:所述船体(1)上设置有龙门架(20),所述龙门架(20)上设置有电动伸缩杆(21),所述电动伸缩杆(21)通过控制器与内置电源电性连接,所述电动伸缩杆(21)的伸缩端设置有压板(22)。
7.根据权利要求1所述的一种水下割草机器人,其特征在于:所述水下割草机器人还包括远程遥控装置和设置于船体(1)后端的推进器(4),所述远程遥控装置用于操作者调整船体(1)的方向和速度;
8.根据权利要求1所述的一种水下割草机器人,其特征在于:所述水下割草机器人还包括识别模块,所述识别模块用于实时处理获取的水草位置数据,所述识别模块包括摄像头及视频解码器,所述摄像头采集的图像通过视频解码器解码后传输给控制器。
技术总结
本技术涉及一种水下割草机器人,包括船体,所述船体的前端通过第一支架固定连接有安装架,所述安装架的前端通过第二支架固定连接有固定板,所述固定板上设置有固定锯条,所述安装架的前端设置有电机,所述电机通过控制器与内置电源电性连接,所述电机的输出端固定连接有第一转轴,所述第一转轴上设置有主动辊和主动齿轮;本技术通过电机带动主动辊和主动齿轮转动,主动齿轮通过从动齿轮带动第二转轴和圆盘转动,圆盘通过偏心连杆带动活动锯条相对于固定锯条做往复运动,将水草进行切割,传动带在主动辊和从动辊的摩擦传动作用下转动,将切割的水草送入船体中,实现了水草切割及打捞一体化,降低了人工劳动强度,提高了工作效率。
技术研发人员:夏长春,孙陈杰,茅燕萍,陈欢,梁吉,寿嘉玥,赵哲铭
受保护的技术使用者:上海市医药学校
技术研发日:20230627
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!