自主割草机器人的制作方法
本公开涉及一种自主割草机器人。
背景技术:
1、现有技术中的自主割草机器人均能够以自主方式在区域中割草。这种自主割草机器人均包括一个或者多个电池和一个或多个电机。
2、为了方便对自主割草机器人的电池进行充电,在一些自主割草机器人中设置有可互换的电池,该可互换的电池能够从自主割草机器人中被拆除,由此能够实现电池的更换,实现自主割草机器人的连续作业。
3、一般来说,自主割草机器人在室外活动时,需要确保降水等气候下的电池安全,由于在自主割草机器人操作期间,容置腔可能会漏水或者被打开,影响了电池的安全,甚至会造成自主割草机器人的损坏。
技术实现思路
1、为了解决上述技术问题之一,本公开提供了一种自主割草机器人。
2、根据本公开的一个方面,提供了一种自主割草机器人,其包括:
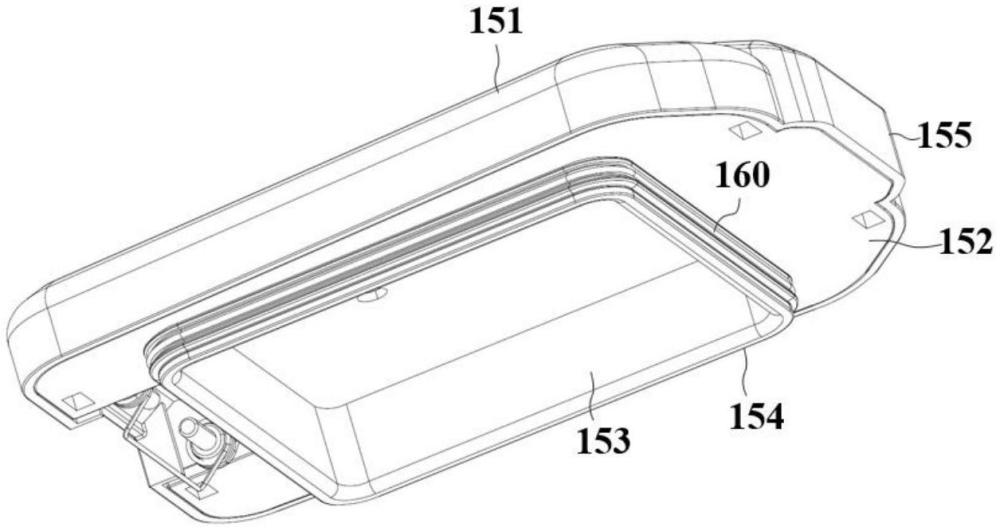
3、主体部;所述主体部包括具有开口的容置空间以及环绕所述开口的紧固件;
4、驱动单元,所述驱动单元设置于所述主体部,用于使得自主割草机器人运动;
5、切割单元,所述切割单元设置于所述主体部,并被配置为在自主割草机器人运行期间切割草;
6、动力单元,所述动力单元被配置为在自主割草机器人运行期间为驱动单元和切割单元提供动力;其中,所述动力单元包括电池包,所述电池包被可拆地收纳于所述主体部的容置空间内;
7、盖组件,所述盖组件用于打开或封闭所述容置空间的开口;以及
8、密封件,所述密封件环绕所述开口设置,以在所述盖组件封闭所述开口时,所述密封件和所述紧固件相互作用,以形成所述开口的密封且限制所述盖组件和所述开口的相对运动。
9、根据本公开的至少一个实施方式的自主割草机器人,所述盖组件被枢转地布置在所述主体部。
10、根据本公开的至少一个实施方式的自主割草机器人,所述盖组件与主体部之间的枢转轴水平设置。
11、根据本公开的至少一个实施方式的自主割草机器人,所述枢转轴与自主割草机器人的前行方向基本垂直。
12、根据本公开的至少一个实施方式的自主割草机器人,所述枢转轴上设置有弹性件,所述弹性件用于向盖组件施加复位力,该复位力能够使得盖组件存在打开所述开口的运动趋势。
13、根据本公开的至少一个实施方式的自主割草机器人,所述盖组件包括外盖和内盖,其中,所述内盖可枢转地设置于所述主体部,所述外盖设置于所述内盖,并位于所述内盖的上方。
14、根据本公开的至少一个实施方式的自主割草机器人,所述内盖设置有延伸部,所述延伸部沿远离外盖的方向延伸,所述密封件环绕所述延伸部设置。
15、根据本公开的至少一个实施方式的自主割草机器人,所述延伸部远离所述外盖的一端形成有翻边部,并通过所述翻边部保持所述密封件。
16、根据本公开的至少一个实施方式的自主割草机器人,所述密封件为密封胶条。
17、根据本公开的至少一个实施方式的自主割草机器人,所述主体部包括凹陷部,所述凹陷部的底壁形成上述开口。
18、根据本公开的至少一个实施方式的自主割草机器人,所述凹陷部的底壁呈水平状,或者,沿从前至后的方向,所述凹陷部的底壁向下倾斜。
19、根据本公开的至少一个实施方式的自主割草机器人,从所述底壁上向上延伸形成有肋板,所述肋板环绕所述开口设置,以通过所述肋板形成紧固件。
20、根据本公开的至少一个实施方式的自主割草机器人,所述肋板的内径大于密封件的内径,以当所述盖组件封闭所述开口时,所述密封件的外缘紧靠所述肋板的内缘,并使得所述密封件和肋板之间形成过盈配合。
21、根据本公开的至少一个实施方式的自主割草机器人,所述盖组件的外盖设置有操作部,所述操作部从所述外盖向外延伸形成。
22、根据本公开的至少一个实施方式的自主割草机器人,还包括雨水传感器,所述雨水传感器用于检测是否存在降水;在降水的情况下,所述盖组件封闭所述开口的状态被改变时,控制自主割草机器人报警。
技术特征:
1.一种自主割草机器人,其特征在于,包括:
2.如权利要求1所述的自主割草机器人,其特征在于,所述盖组件被枢转地布置在所述主体部。
3.如权利要求2所述的自主割草机器人,其特征在于,所述盖组件与主体部之间的枢转轴水平设置。
4.如权利要求3所述的自主割草机器人,其特征在于,所述枢转轴与自主割草机器人的前行方向基本垂直。
5.如权利要求3所述的自主割草机器人,其特征在于,所述枢转轴上设置有弹性件,所述弹性件用于向盖组件施加复位力,该复位力能够使得盖组件存在打开所述开口的运动趋势。
6.如权利要求2所述的自主割草机器人,其特征在于,所述盖组件包括外盖和内盖,其中,所述内盖可枢转地设置于所述主体部,所述外盖设置于所述内盖,并位于所述内盖的上方。
7.如权利要求6所述的自主割草机器人,其特征在于,所述内盖设置有延伸部,所述延伸部沿远离外盖的方向延伸,所述密封件环绕所述延伸部设置。
8.如权利要求7所述的自主割草机器人,其特征在于,所述延伸部远离所述外盖的一端形成有翻边部,并通过所述翻边部保持所述密封件。
9.如权利要求7所述的自主割草机器人,其特征在于,所述密封件为密封胶条。
10.如权利要求1所述的自主割草机器人,其特征在于,所述主体部包括凹陷部,所述凹陷部的底壁形成上述开口。
11.如权利要求10所述的自主割草机器人,其特征在于,所述凹陷部的底壁呈水平状,或者,沿从前至后的方向,所述凹陷部的底壁向下倾斜。
12.如权利要求11所述的自主割草机器人,其特征在于,从所述底壁上向上延伸形成有肋板,所述肋板环绕所述开口设置,以通过所述肋板形成紧固件。
13.如权利要求12所述的自主割草机器人,其特征在于,所述肋板的内径大于密封件的内径,以当所述盖组件封闭所述开口时,所述密封件的外缘紧靠所述肋板的内缘,并使得所述密封件和肋板之间形成过盈配合。
14.如权利要求1所述的自主割草机器人,其特征在于,所述盖组件的外盖设置有操作部,所述操作部从所述外盖向外延伸形成。
15.如权利要求1所述的自主割草机器人,其特征在于,还包括雨水传感器,所述雨水传感器用于检测是否存在降水;在降水的情况下,所述盖组件封闭所述开口的状态被改变时,控制自主割草机器人报警。
技术总结
本公开提供一种自主割草机器人,其包括:主体部;所述主体部包括具有开口的容置空间以及环绕所述开口的紧固件;驱动单元,所述驱动单元设置于所述主体部;切割单元,所述切割单元设置于所述主体部;动力单元,所述动力单元被配置为在自主割草机器人运行期间为驱动单元和切割单元提供动力;其中,所述动力单元包括电池包,所述电池包被可拆地收纳于所述主体部的容置空间内;盖组件,所述盖组件用于打开或封闭所述容置空间的开口;以及密封件,所述密封件环绕所述开口设置,以在所述盖组件封闭所述开口时,所述密封件和所述紧固件相互作用,以形成所述开口的密封且限制所述盖组件和所述开口的相对运动。
技术研发人员:李嘉旗,唐成,段飞,罗吉成
受保护的技术使用者:北京顺造科技有限公司
技术研发日:20230713
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!