基于北斗导航的无人驾驶收割机控制系统的制作方法
本技术涉及一种基于北斗导航的无人驾驶收割机控制系统,属于农用机械。
背景技术:
1、随着无人驾驶技术的推进,越来越多的产品都推无人收割机是一种用于农业生产的自动化设备,它能够自动完成收割作物的任务,而不需要人工干预。
2、无人收割机的工作原理通常包括以下几个步骤:导航:无人收割机通过gps或其他定位系统确定自己的位置,并沿着预定的路线行驶。作物检测:无人收割机通过传感器或摄像头检测作物的生长情况和位置。切割作物:无人收割机的切割装置根据作物的高度和密度自动调整,以确保作物被正确切割。收集作物:切割后的作物通过输送装置传输到收集装置中,进行集中处理。因为农作物在收获期间天气炎热,操作人员故而需要承受高温,而且随着大面积统一种植收割,自动化程度越来越高,故而研发一种新型无人收割机。
技术实现思路
1、本实用新型要解决的技术问题是:克服现有技术的不足,提供一种基于北斗导航的无人驾驶收割机控制系统,实现无人驾驶,通过远程进行操纵,避免实时跟随联合收割机进行收割,容易实现,通用性高。
2、本实用新型所述的基于北斗导航的无人驾驶收割机控制系统,包括:
3、联合收割机,联合收割机上安装有卫星导航模块、传感器融合模块和控制系统;
4、卫星导航模块,联合收割机在室外行驶或工作时,检测当前位置信息,传送给控制模块;
5、传感器融合模块,用于从若干传感器收集数据,融合成统一图像,传送给控制模块;
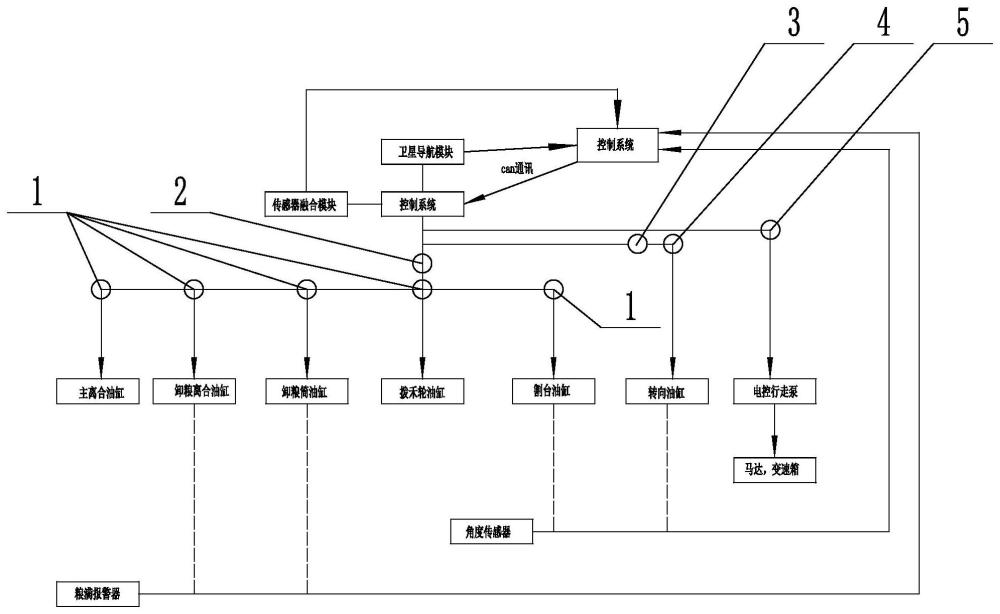
6、控制系统,用于控制联合收割机并实现各种动作,其中包括控制器、电机和电控手柄,控制模块传送给控制系统对其实现控制;
7、控制模块分别与卫星导航模块、传感器融合模块和控制系统连接,利用卫星导航模块现实位置,利用传感器融合模块显示当前环境的实时动态,利用控制系统实现对联合收割机的控制。
8、进一步地,若干控制器通过电磁阀分别对应控制主离合油缸、卸粮离合油缸、卸粮筒油缸、拔禾轮油缸、割台油缸。
9、进一步地,电控手柄对应控制电控行走泵,通过行走泵控制马达和变速箱。
10、进一步地,电机通过后端的方向机对应控制转向油缸。
11、进一步地,还包括联合收割机上设置的角度传感器,角度传感器用于检测割台油缸和转向油缸的位置,反馈给控制模块。
12、进一步地,还包括联合收割机上设置的报警模块,报警模块用于发出信号,使联合收割机停止前进,且反馈到控制模块。
13、进一步地,控制模块分别与卫星导航模块、传感器融合模块和控制系统采用can通讯连接。
14、与现有技术相比,本实用新型的有益效果是:
15、本实用新型通过控制模块分别与卫星导航模块、传感器融合模块和控制系统连接,实现无人驾驶,通过控制模块远程进行操纵联合收割机,避免实时操作人员跟随联合收割机进行收割,技术方案容易实现,且通用性高。
技术特征:
1.一种基于北斗导航的无人驾驶收割机控制系统,其特征在于,包括:
2.根据权利要求1所述的基于北斗导航的无人驾驶收割机控制系统,其特征在于,若干控制器(2)通过电磁阀(1)分别对应控制主离合油缸、卸粮离合油缸、卸粮筒油缸、拔禾轮油缸、割台油缸。
3.根据权利要求1所述的基于北斗导航的无人驾驶收割机控制系统,其特征在于,电控手柄(5)对应控制电控行走泵,通过行走泵控制马达和变速箱。
4.根据权利要求1所述的基于北斗导航的无人驾驶收割机控制系统,其特征在于,电机(3)通过后端的方向机(4)对应控制转向油缸。
5.根据权利要求1-4任一项所述的基于北斗导航的无人驾驶收割机控制系统,其特征在于,还包括联合收割机上设置的角度传感器,角度传感器用于检测割台油缸和转向油缸的位置,反馈给控制模块。
6.根据权利要求1-4任一项所述的基于北斗导航的无人驾驶收割机控制系统,其特征在于,还包括联合收割机上设置的报警模块,报警模块用于发出信号,使联合收割机停止前进,且反馈到控制模块。
7.根据权利要求1所述的基于北斗导航的无人驾驶收割机控制系统,其特征在于,控制模块分别与卫星导航模块、传感器融合模块和控制系统采用can通讯连接。
技术总结
本技术涉及一种基于北斗导航的无人驾驶收割机控制系统,属于农用机械技术领域。包括:联合收割机,联合收割机上安装有卫星导航模块、传感器融合模块和控制系统;控制模块分别与卫星导航模块、传感器融合模块和控制系统连接,利用卫星导航模块现实位置,利用传感器融合模块显示当前环境的实时动态,利用控制系统实现对联合收割机的控制。本技术提供一种基于北斗导航的无人驾驶收割机控制系统,实现无人驾驶,通过远程进行操纵,避免实时跟随联合收割机进行收割,容易实现,通用性高。
技术研发人员:齐金财,高奎增,巩泽光
受保护的技术使用者:山东巨明机械有限公司
技术研发日:20230807
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!