幼苗移栽精准施灌智能装备
本发明涉及农用机械,尤其是涉及幼苗移栽精准施灌智能装备。
背景技术:
1、辣椒作为一种常见的农作物,在种植过程中,当需求种植面积较大时,通常会先培育辣椒幼苗再进行移栽。在传统的人工移栽方式下,需要大量人力对辣椒幼苗进行手工移栽。然而,传统人工移栽存在明显的缺陷。首先,完成一次作物的取出到移栽完成通常需要较长的时间,效率过于低下,在移栽过程中,人们长时间处于半蹲状态,很容易造成腰椎劳损,严重时甚至会导致难以根治的腰椎疾病。因此,传统的人工移栽需要大量人力,劳动强度高,但效率低下。其次,在需要精确控制移栽后作物间距时,人工移栽往往无法满足精准度要求。
2、在辣椒地的日常管理中,浇灌辣椒是最基础且频繁的工作。然而,在传统方式下,辣椒的浇灌多采用人工喷洒、漫灌、管道浇灌等方式。这些方式均需要大量人工操作,且存在耗水量大、浇灌不均匀、浇灌位置不精准、劳动强度大、生产效率低等问题。
技术实现思路
1、本发明的目的在于提供幼苗移栽精准施灌智能装备,能够在移栽过程中节省人力、实现批量幼苗移栽,并在日常管理过程中实现节水、高效、精准施灌;
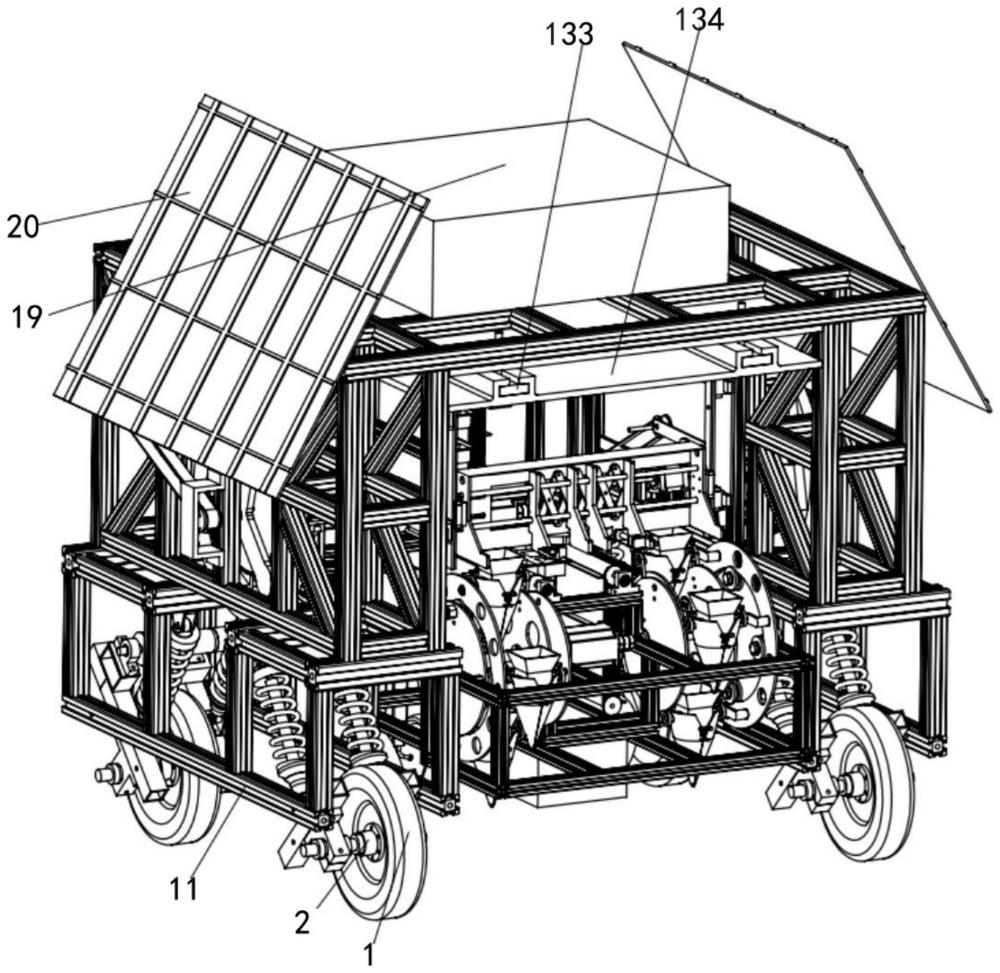
2、本发明提供幼苗移栽精准施灌智能装备,包括:车身框架,所述车身框架底部设有行走装置;幼苗输送装置,所述幼苗输送夹取装置包括用于存放并放出幼苗盘的第一同步带系统,用于输送幼苗盘的第二同步带系统,和用于回收幼苗盘的第三同步带系统;幼苗夹取装置,所述幼苗夹取装置用于夹取幼苗盘内的幼苗,并送入幼苗移栽装置;幼苗移栽装置,所述幼苗移栽装置用于将幼苗载入土地;幼苗覆土装置,所述幼苗覆土装置用于当幼苗被移栽入土地后覆土;精准施灌装置,所述精准施灌装置包括灌溉喷头,所述喷头通过角度调整装置安装在所述车身框架上。
3、进一步地,所述第一同步带系统上设有多个幼苗盘存放单元,所述第二同步带系统的后端设置在所述第一同步带系统的下方,所述第二同步带系统输送来自所述第一同步带系统的幼苗盘,所述第三同步带系统上设有多个幼苗盘存放单元,所述第二同步带系统将所述幼苗夹取装置夹取幼苗后的幼苗盘输送至所述第三同步带系统。
4、进一步地,所述幼苗夹取装置包括夹取同步带系统,所述夹取同步带系统包括设置在所述车身框架内两侧的斜向输送带;所述斜向输送带的后端位于下侧,与所述第二同步带系统通过双轴电机同步传动;所述斜向输送带的前端位于上侧,所述斜向输送带的前端带轮上连接有连杆,所述连杆上连接有剪式机构外壳。
5、进一步地,所述剪式机构外壳内可滑动的设有活动夹板;所述剪式机构外壳背侧设有电机丝杆,所述丝杆上的丝杆螺母与所述活动夹板连接。
6、进一步地,所述双轴电机与所述第二同步带系统连接的一侧轴上连接有齿轮盘,所述齿轮盘内设有槽,槽内可滑动的设有活动杆;所述第二同步带系统上设有与带轮同步传动的棘轮;当所述双轴电机向第一方向旋转时,所述活动杆拨动所述棘轮使所述第二同步带系统转动输送幼苗盘;当所述双轴电机向第二方向旋转时,所述活动杆从所述棘轮滑开,使所述第二同步带系统停止转动;所述第一方向与所述第二方向相反。
7、进一步地,所述幼苗移栽装置包括转动驱动器和转动盘,所述转动驱动器驱动所述转动盘转动;所述转动盘上环绕设置多个鸭嘴漏斗,在所述转动盘的转动过程中,处于最低点的鸭嘴漏斗插入土地中,将幼苗插入土地。
8、进一步地,所述鸭嘴漏斗包括铰接的鸭嘴左板和鸭嘴右板,鸭嘴左板和鸭嘴右板的铰接处之上分别设有缺口,鸭嘴左板和鸭嘴右板闭合时缺口组成v形槽结构;鸭嘴左板和鸭嘴右板的顶端分别设有耳板,当鸭嘴漏斗处于最低点时,所述转动盘压迫所述耳板,使鸭嘴左板和鸭嘴右板的底端张开撑开土壤,幼苗落入土壤中;当鸭嘴漏斗离开最低点时,所述转动盘离开对所述耳板的压迫,使鸭嘴左板和鸭嘴右板的底端重新闭合,土壤包围幼苗。
9、进一步地,所述幼苗覆土装置包括覆土轮,两个所述覆土轮连接在车轮轴的两侧,所述车轮轴连接在所述车身框架的底部,两个所述覆土轮呈顶端远而底端近的倾斜结构。
10、进一步地,所述角度调整装置包括行星齿轮装置和第二电机;所述行星齿轮装置包括以行星齿轮结构连接的行星小齿轮、行星大齿轮和外圈齿轮盘,所述喷头安装在所述外圈齿轮盘上;所述第二电机安装于所述车身框架上,通过传动机构驱动所述行星大齿轮转动,使所述喷头可旋转角度。
11、进一步地,所述外圈齿轮盘上安装有直线驱动器,所述直线驱动器上连接有一个舵机云台,所述喷头安装在所述舵机云台上。
12、本发明的技术方案具有如下有益效果:
13、(1)采用了模块化设计策略,将具有多样化功能效应的模块进行拆分。这种设计方法不仅有效地节省了空间,降低了重量,而且还提高了存放、运输和替换的便捷性。在工作过程中,可以拆除不活跃模块,降低整体负载,实现节能减排的目标。
14、(2)在精准施灌装置中采用齿轮、滑轨和云台协同配合的方式,其中,行星齿轮结构具有较高的可靠性和耐用性,降低了故障率和维护成本,该结构在传动力矩时采用多支撑点,减少了传递损耗,提高了传递效率,进而达到降低能耗的效果,云台结构紧凑,在俯仰方向上稳定性和精确度高。因此,在三者协同配合下,有效提高了施灌机构的灵活性,增大了施灌覆盖面积,提高了施灌的精确度,同时降低能耗,降低用水量。
15、(3)采用了多轴同步带系统,实现了各系统自适应协同输送。有利于实现辣椒幼苗盘的精准、稳定传输。同时,多轴同步带系统具有体积小、质量轻的特点,可容纳更多的幼苗盘。借助该系统,可以进行大面积、长时间的移栽工作。
16、(4)在幼苗输送夹取装置中,采用双轴电机、活动杆和棘轮的传动系统,使得幼苗输送装置和幼苗夹取装置高效的进行运动配合,同时减少了动力源、达到了降低能耗的作用。
17、(5)在工作过程中,唯有将幼苗盘放入设备需要人工放入,其他情况下均由装置自身结构与系统进行配合解决,有效提升工作效率,一定程度上也降低了生产成本。
技术特征:
1.幼苗移栽精准施灌智能装备,其特征在于,包括:
2.根据权利要求1所述的幼苗移栽精准施灌智能装备,其特征在于,所述第一同步带系统上设有多个幼苗盘存放单元,所述第二同步带系统的后端设置在所述第一同步带系统的下方,所述第二同步带系统输送来自所述第一同步带系统的幼苗盘,所述第三同步带系统上设有多个幼苗盘存放单元,所述第二同步带系统将所述幼苗夹取装置夹取幼苗后的幼苗盘输送至所述第三同步带系统。
3.根据权利要求2所述的幼苗移栽精准施灌智能装备,其特征在于,所述幼苗夹取装置包括夹取同步带系统,所述夹取同步带系统包括设置在所述车身框架内两侧的斜向输送带;
4.根据权利要求3所述的幼苗移栽精准施灌智能装备,其特征在于,所述剪式机构外壳内可滑动的设有活动夹板;所述剪式机构外壳背侧设有电机丝杆,所述丝杆上的丝杆螺母与所述活动夹板连接。
5.根据权利要求3所述的幼苗移栽精准施灌智能装备,其特征在于,所述双轴电机与所述第二同步带系统连接的一侧轴上连接有齿轮盘,所述齿轮盘内设有槽,槽内可滑动的设有活动杆;
6.根据权利要求1所述的幼苗移栽精准施灌智能装备,其特征在于,所述幼苗移栽装置包括转动驱动器和转动盘,所述转动驱动器驱动所述转动盘转动;
7.根据权利要求6所述的幼苗移栽精准施灌智能装备,其特征在于,所述鸭嘴漏斗包括铰接的鸭嘴左板和鸭嘴右板,鸭嘴左板和鸭嘴右板的铰接处之上分别设有缺口,鸭嘴左板和鸭嘴右板闭合时缺口组成v形槽结构;
8.根据权利要求1所述的幼苗移栽精准施灌智能装备,其特征在于,所述幼苗覆土装置包括覆土轮,两个所述覆土轮连接在车轮轴的两侧,所述车轮轴连接在所述车身框架的底部,两个所述覆土轮呈顶端远而底端近的倾斜结构。
9.根据权利要求1所述的幼苗移栽精准施灌智能装备,其特征在于,所述角度调整装置包括行星齿轮装置和第二电机;
10.根据权利要求9所述的幼苗移栽精准施灌智能装备,其特征在于,所述外圈齿轮盘上安装有直线驱动器,所述直线驱动器上连接有一个舵机云台,所述喷头安装在所述舵机云台上。
技术总结
本发明提供了幼苗移栽精准施灌智能装备,涉及农用机械技术领域,包括:车身框架,车身框架底部设有行走装置;幼苗输送装置,幼苗输送夹取装置包括用于存放并放出幼苗盘的第一同步带系统,用于输送幼苗盘的第二同步带系统,和用于回收幼苗盘的第三同步带系统;幼苗夹取装置,幼苗夹取装置用于夹取幼苗盘内的幼苗,并送入幼苗移栽装置;幼苗移栽装置,幼苗移栽装置用于将幼苗载入土地;幼苗覆土装置,幼苗覆土装置用于当幼苗被移栽入土地后覆土;精准施灌装置,精准施灌装置包括灌溉喷头,喷头通过角度调整装置安装在车身框架上。本发明能够在移栽过程中节省人力、实现批量幼苗移栽,并在日常管理过程中实现节水、高效、精准施灌。
技术研发人员:唐睿智,李嘉豪,胡翰泓,林海,周晓阳,张忠林,王梓安,吴浩宇,杨锦峰,朱煜,郭家豪,陆展昌
受保护的技术使用者:广州大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!