四自由度机械臂仿人工式智能喷雾施药小车
本发明属于农药喷施设备,涉及一种喷施农药机器人,具体涉及一种四自由度机械臂仿人工式智能喷雾施药小车。
背景技术:
1、目前设施农业在全球范围内发展迅速,并且有着广阔的前景。它在全球各地, 尤其是在地理环境复杂,自然条件不适合农业生产的地区,具有十分重要的地位。设施农业能够对提高农业生产效率等问题起到重要作用。
2、喷洒农药是农作物种植期间的一个重要工序,目前在温室的湿、热、闷作业环境下农药喷洒工序存在两种主要的方式:一种是人工喷洒农药,该方式效率低下,农药浪费大,成本高并且对于施药着在湿、热、闷环境下与农药长期接触有害身体健康,而且需要耗费大量的人力;另一种是使用新型直杆式农药喷雾车进行喷洒作业,但是目前使用的农药喷雾车,主要用于农场化、集成化的农作物种植中,虽然相比与单纯人工的工作效率有所提高,但仍存在如下弊端:(1)无法完全脱离人工,仍需要人工在现场进行操作干预;(2)只能对特定的区域进行喷雾,无法实现对任意区域任意高度的特定位置进行农药喷雾,灵活性差,喷雾定位不准确,喷雾有效覆盖率低。(3)结构复杂、价格昂贵。
技术实现思路
1、针对上述问题情况,本发明提供一种四自由度机械臂仿人工式智能喷雾施药小车,可作双相喷雾器和传统喷雾器混合使用,通过远程操作避免了人体在现场作业对健康的威胁,并且满足病虫害防控要求情况下提高了农药的有效利用率,减少农药过度使用造成环境污染,提高了设施农业喷施作业效益。
2、为了实现上述目的,本发明采取的技术方案为:
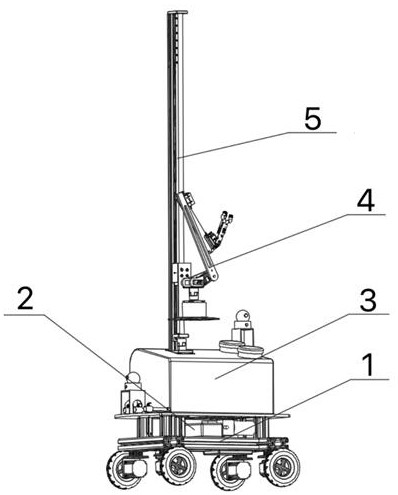
3、一种四自由度机械臂仿人工式智能喷雾施药小车,包括四驱小车、控制组件、多功能喷雾器、四自由度机械臂以及丝杆传动机构,所述四驱小车包括上板、车架、第一电机以及车轮,上板设置在车架的上方,所述控制组件设置在四驱小车的车架中间,用于对整个小车进行控制,所述丝杆传动机构设置在车架上,四自由度机械臂设置在丝杆传动机构的滑块上,能够随滑块移动进行高度调整,所述多功能喷雾器设置在上板上,多功能喷雾器的雾化喷头设置在四自由度机械臂的端部,实现多自由度的喷雾操作。
4、进一步的,所述四驱小车由铝型材搭建框架,所述第一电机通过电机固定架固定在车架底部,四个车轮固定在第一电机的轴上。
5、进一步的,所述四驱小车的车架和电机固定架之间还设置有弹簧减震机构,所述弹簧减震机构包括上固定板、下固定板以及连接上固定板和下固定板的弹簧,所述上固定板和车架底部固定连接,所述下固定板和电机固定架固定连接。
6、进一步的,在上板的一端安装有头部摄像头,在上板的另一端安装有尾部摄像头;车架间通过角码连接。
7、进一步的,所述控制组件固定在车架中间,包括驱动器、单片机模块、电池以及水泵,所述单片机模块用于控制四自由度机械臂的运动、丝杆传动机构的移动、四驱小车的运动以及多功能喷雾器水泵的启停,所述单片机模块上还连接有无线模块。
8、进一步的,所述丝杆传动机构通过连接板安装在车架上,所述丝杆传动机构包括背板、丝杆、滑块、第二电机以及臂座台,所述背板与连接板固定,背板的上下两端分别设置有上挡板和下挡板,丝杆两端与轴承固定并同心设置在上挡板和下挡板之间,所述第二电机通过联轴器与丝杆固定,背板上设置有导轨,导轨末端设置有挡块,所述滑块套设在丝杆上能够沿导轨移动,滑块上设置有臂座台,用于固定四自由度机械臂。
9、进一步的,所述四自由度机械臂通过臂座台固定在丝杆传动机构上,包括臂座、第三电机、基座臂、大臂、小臂以及末端执行臂,第三电机安装在臂座上,第三电机通过第二联轴器与基座臂固定,基座臂和大臂通过第一舵机连接,大臂和小臂通过第二舵机连接,小臂和末端执行臂通过第三舵机连接。
10、进一步的,所述多功能喷雾器的箱体由两个独立的水箱构成,通过多功能水管连接,多功能水管的端部安装有雾化喷头,所述雾化喷头固定在四自由度机械臂的末端执行臂上,多功能水管上安装有第一阀门、第二阀门和第三阀门,箱体上安装两个箱盖。
11、进一步的,所述水泵用于将多功能喷雾器中农药传到雾化喷头处雾化喷出。
12、与现有技术相比,本发明技术方案具有如下有益效果:
13、本发明提供一种四自由度机械臂仿人工式智能喷雾施药小车,结构上由四驱小车底盘,四自由度机械臂,丝杆传动机构,双相喷雾水箱,控制箱,管路以及驱动装置构成,结构上新颖。通过控制组件内的无线模块可在手机端远程控制小车移动以及喷雾机械臂,丝杆机构和水泵的工作,工作原理上清晰。双相喷雾水箱,可随应用场景更换的喷头,不仅可以作传统喷雾器使用还可作双相喷雾器使用;与传统人工施药作业相比本发明自动化程度更高,操作便捷,作业效率高,适应多种农作物喷施高度需求,可以有效规避人工施药时与药物接触的风险。与新型直杆式喷雾小车相比本发明更加灵活、喷雾定位更加准确,喷雾有效覆盖率更高,更有效减少药物污染。通过弹簧减震机构,起到更好的减振效果,适应不同的地况;通过远程操作避免了人体在现场作业对健康的威胁。
技术特征:
1.一种四自由度机械臂仿人工式智能喷雾施药小车,其特征在于,包括四驱小车(1)、控制组件(2)、多功能喷雾器(3)、四自由度机械臂(4)以及丝杆传动机构(5),所述四驱小车(1)包括上板(101)、车架(102)、第一电机(103)以及车轮(104),上板(101)设置在车架(102)的上方,所述控制组件(2)设置在四驱小车(1)的车架(102)中间,用于对整个小车进行控制,所述丝杆传动机构(5)设置在车架(102)上,四自由度机械臂(4)设置在丝杆传动机构(5)的滑块(508)上,能够随滑块(508)移动进行高度调整,所述多功能喷雾器(3)设置在上板(101)上,多功能喷雾器(3)的雾化喷头(303)设置在四自由度机械臂(4)的端部,实现多自由度的喷雾操作。
2.根据权利要求1所述的一种四自由度机械臂仿人工式智能喷雾施药小车,其特征在于,所述四驱小车(1)由铝型材搭建框架,所述第一电机(103)通过电机固定架(109)固定在车架(102)底部,四个车轮(104)固定在第一电机(103)的轴上。
3.根据权利要求2所述的一种四自由度机械臂仿人工式智能喷雾施药小车,其特征在于,所述四驱小车(1)的车架(102)和电机固定架(109)之间还设置有弹簧减震机构(105),所述弹簧减震机构(105)包括上固定板(1051)、下固定板(1053)以及连接上固定板(1051)和下固定板(1053)的弹簧(1052),所述上固定板(1051)和车架(102)底部固定连接,所述下固定板(1053)和电机固定架(109)固定连接。
4.根据权利要求1所述的一种四自由度机械臂仿人工式智能喷雾施药小车,其特征在于,在上板(101)的一端安装有头部摄像头(107),在上板(101)的另一端安装有尾部摄像头(108);车架(102)间通过角码(106)连接。
5.根据权利要求1所述的一种四自由度机械臂仿人工式智能喷雾施药小车,其特征在于,所述控制组件(2)固定在车架(102)中间,包括驱动器(201)、单片机模块(202)、电池(203)以及水泵(204),所述单片机模块(202)用于控制四自由度机械臂(4)的运动、丝杆传动机构(5)的移动、四驱小车(1)的运动以及多功能喷雾器(3)水泵的启停,所述单片机模块(202)上还连接有无线模块。
6.根据权利要求5所述的一种四自由度机械臂仿人工式智能喷雾施药小车,其特征在于,所述丝杆传动机构(5)通过连接板(511)安装在车架(102)上,所述丝杆传动机构(5)包括背板(507)、丝杆(505)、滑块(508)、第二电机(501)以及臂座台(502),所述背板(507)与连接板(511)固定,背板(507)的上下两端分别设置有上挡板(509)和下挡板(503),丝杆(505)两端与轴承(510)固定并同心设置在上挡板(509)和下挡板(503)之间,所述第二电机(501)通过联轴器(504)与丝杆(505)固定,背板(507)上设置有导轨(506),导轨(506)末端设置有挡块(512),所述滑块(508)套设在丝杆(505)上能够沿导轨(506)移动,滑块(508)上设置有臂座台(502),用于固定四自由度机械臂(4)。
7.根据权利要求6所述的一种四自由度机械臂仿人工式智能喷雾施药小车,其特征在于,所述四自由度机械臂(4)通过臂座台(502)固定在丝杆传动机构(5)上,包括臂座(401)、第三电机(402)、基座臂(404)、大臂(406)、小臂(407)以及末端执行臂(408),第三电机(402)安装在臂座(401)上,第三电机(402)通过第二联轴器(403)与基座臂(404)固定,基座臂(404)和大臂(406)通过第一舵机(405)连接,大臂(406)和小臂(407)通过第二舵机(409)连接,小臂(407)和末端执行臂(408)通过第三舵机(410)连接。
8.根据权利要求7所述的一种四自由度机械臂仿人工式智能喷雾施药小车,其特征在于,所述多功能喷雾器(3)的箱体(301)由两个独立的水箱构成,通过多功能水管(302)连接,多功能水管(302)的端部安装有雾化喷头(303),所述雾化喷头(303)固定在四自由度机械臂(4)的末端执行臂(408)上,多功能水管(302)上安装有第一阀门(305)、第二阀门(306)和第三阀门(307),箱体(301)上安装两个箱盖(304)。
9.根据权利要求5所述的一种四自由度机械臂仿人工式智能喷雾施药小车,其特征在于,所述水泵(204)用于将多功能喷雾器(3)中农药传到雾化喷头(303)处雾化喷出。
技术总结
本发明公开一种四自由度机械臂仿人工式智能喷雾施药小车,结构上包括四驱小车、控制组件、多功能喷雾器、四自由度机械臂以及丝杆传动机构,主要用于温室大棚农作物喷施药物需求,可作双相喷雾器和传统喷雾器混合使用,通过无线模块可在手机端远程控制小车移动以及四自由度机械臂,丝杆传动机构和水泵的工作,根据摄像头传回画面可以实时观察喷雾施药作业情况,工作原理清晰;与传统人工施药作业相比,自动化程度更高,操作便捷,作业效率高,适应多种农作物喷施高度需求包括顶部藤蔓农作物喷施药物需求,有效规避人工施药时与药物接触的风险;与新型直杆式喷雾车相比,更加灵活、喷雾定位更加准确,喷雾有效覆盖率更高,更有效减少药物污染。
技术研发人员:柳永,邓鑫民
受保护的技术使用者:浙江科技大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!