一种甘蔗收割机刀盘入土切割深度控制方法
本发明涉及甘蔗收割机切割方法,具体涉及一种甘蔗收割机刀盘入土切割深度控制方法。
背景技术:
1、甘蔗是制糖、轻工和能源的重要原料。我国甘蔗收获机械化程度低,造成甘蔗收获效率低、成本高。实践中发现,甘蔗收割机在收获时刀盘入土切割深度在2~5cm之间较为合适,但由于南方丘陵地带甘蔗种植区地势多起伏变化,现有的机械收获作业时需人工对切割刀盘深度进行调整,降低了机械收获效率,驾驶员在驾驶室内难以观察切割刀盘所在位置,调整时也相当困难,容易造成甘蔗根茬高度不一,根茬破头等问题,导致甘蔗机械化收获中根切效果并不理想,直接影响到了机械化收获的推广应用。
技术实现思路
1、本发明的目的在于克服上述存在的问题,提供一种甘蔗收割机刀盘入土切割深度控制方法,该切割深度控制方法能够实时精准控制刀盘的入土深度,有利于避免出现甘蔗根茬高度不一、根茬破头等问题。
2、本发明的目的通过以下技术方案实现:
3、一种甘蔗收割机刀盘入土切割深度控制方法,包括以下步骤:
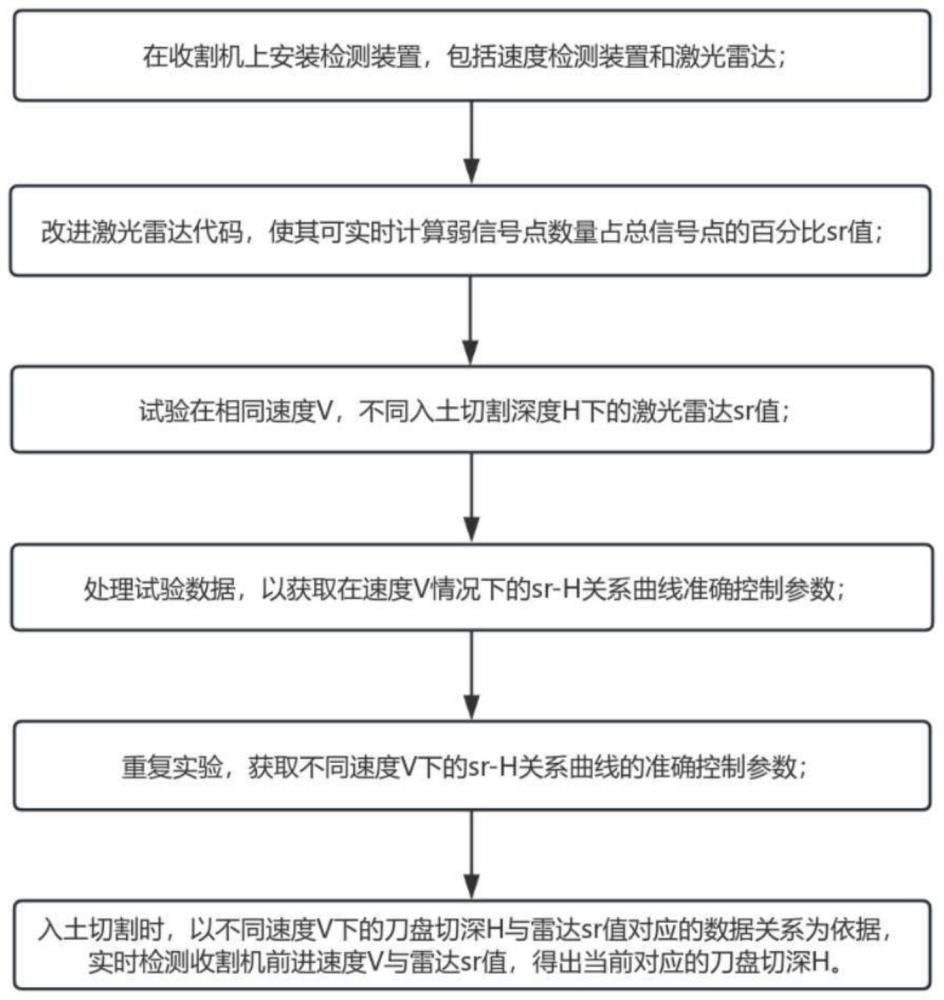
4、(1)将传感器安装在甘蔗收割机上;所述传感器包括用于检测飞溅土壤的激光雷达,该激光雷达的扫描方向对准刀盘入土切割时甩出的土壤位置;
5、(2)通过入土切割试验构建切割深度对照模型,该切割深度对照模型包括弱信号比与切割深度的关系模型,所述弱信号比为通过激光雷达检测得到的弱信号点占总信号点的百分比;
6、(3)进行收割作业时,通过激光雷达实时扫描刀盘入土切割时甩出的土壤位置,并将实时扫描的信号返回至后台控制器中,由后台控制器识别该实时扫描的信号中的弱信号,并计算弱信号点占总信号点的百分比;将该百分比与切割深度对照模型进行比对,找到该百分比对应的切割深度,该切割深度为当前刀盘入土的深度;
7、(4)通过对比当前的刀盘入土的深度与预设的理想切深的差别,实时调整刀盘的高度,使刀盘的实时切深达到预设的理想切深。
8、本发明的一个优选方案,其中,所述切割深度对照模型的构建方法为:
9、平整土地到同一高度;
10、划分多级试验的切割深度;多级试验的切割深度从0开始逐渐递增;
11、按照上述分好的切割深度逐级开始切割试验,试验的具体操作为:
12、将刀盘至于对应的切割深度上;以固定的刀盘转速对甘蔗进行切割并行进设定距离;通过激光雷达对刀盘的出土位置进行扫描,并将每个扫描区间的信号点上传至后台控制器中,该信号点包括强信号点和弱信号点,所述弱信号点代表飞溅的土壤;统计每个扫描区间的弱信号点及总信号点数量,计算每个扫描区间的弱信号点占总信号点的百分比,用sr表示;求弱信号点的百分比平均值,将该百分比平均值储存在程序中的当前深度的sr变量里;
13、按照上述操作,直至完成所有切割深度等级的试验,得到所有切割深度h对应的sr值。
14、进一步,通过后台控制器接收试验数据,得到sr值与切割深度h的二维点云,该二维点云为以切割深度h为变量的sr值的离散序列;编写低通滤波器程序,对该离散序进行离散滤波,过滤得到曲线的部分剩余点云作为特征值;对经滤波处理后剩余的二维点云进行sr-h关系曲线的插值运算和校正,以获得sr-h关系曲线的准确控制参数。
15、进一步,所述强信号点代表田间地面以及甘蔗的叶或茎。
16、本发明的一个优选方案,其中,所述传感器还包括用于检测甘蔗收获机的行走速度的速度传感器。
17、进一步,在开始切割试验之前,划分多级试验的收割机行走速度;多级试验的行走速度从0开始逐渐递增;
18、开始切割试验时,设定收割机行走速度的行走速度,按照试验的具体操作完成该行走速度下的所有切割深度对应的sr值;
19、按照上述操作,直至完成所有行走速度等级的试验,得到所有行走速度对应的sr-h关系。
20、进一步,所述速度传感器固定在甘蔗收割机的车轮轴上,通过数据采集卡采集速度传感器检测到的行走速度数据并传送给后台控制器。
21、本发明与现有技术相比具有以下有益效果:
22、1、本发明的切割深度控制方法通过激光雷达扫描刀盘入土切割时甩出的土壤,并得到代表土壤的弱信号的百分比,将该百分比与切割深度对照模型进行比对,找到该百分比对应的切割深度;通过对比当前的刀盘入土的深度与预设的理想切深的差别,实时精准调整刀盘的高度,使刀盘的实时切深达到预设的理想切深,有利于避免出现甘蔗根茬高度不一、根茬破头等问题。
23、2、不易受到田间环境的干扰。在田间收获时,蔗田的蔗叶、杂草、倒伏甘蔗等对激光雷达信号点强度的影响很小,抗干扰能力强。
技术特征:
1.一种甘蔗收割机刀盘入土切割深度控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的甘蔗收割机刀盘入土切割深度控制方法,其特征在于,所述切割深度对照模型的构建方法为:
3.根据权利要求2所述的甘蔗收割机刀盘入土切割深度控制方法,其特征在于,通过后台控制器接收试验数据,得到sr值与切割深度h的二维点云,该二维点云为以切割深度h为变量的sr值的离散序列;编写低通滤波器程序,对该离散序进行离散滤波,过滤得到曲线的部分剩余点云作为特征值;对经滤波处理后剩余的二维点云进行sr-h关系曲线的插值运算和校正,以获得sr-h关系曲线的准确控制参数。
4.根据权利要求2所述的甘蔗收割机刀盘入土切割深度控制方法,其特征在于,所述强信号点代表田间地面以及甘蔗的叶或茎。
5.根据权利要求2所述的甘蔗收割机刀盘入土切割深度控制方法,其特征在于,所述传感器还包括用于检测甘蔗收获机的行走速度的速度传感器。
6.根据权利要求5所述的甘蔗收割机刀盘入土切割深度控制方法,其特征在于,在开始切割试验之前,划分多级试验的收割机行走速度;多级试验的行走速度从0开始逐渐递增;
7.根据权利要求5所述的甘蔗收割机刀盘入土切割深度控制方法,其特征在于,所述速度传感器固定在甘蔗收割机的车轮轴上,通过数据采集卡采集速度传感器检测到的行走速度数据并传送给后台控制器。
技术总结
本发明公开一种甘蔗收割机刀盘入土切割深度控制方法,包括以下步骤:将传感器安装在甘蔗收割机上;所述传感器包括用于检测飞溅土壤的激光雷达;通过入土切割试验构建切割深度对照模型,该切割深度对照模型包括弱信号比与切割深度的关系模型;进行收割作业时,通过激光雷达实时扫描刀盘入土切割时甩出的土壤位置,并将实时扫描的信号返回至后台控制器中,由后台控制器识别该实时扫描的信号中的弱信号,并计算弱信号点占总信号点的百分比;将该百分比与切割深度对照模型进行比对,找到当前刀盘入土的深度;实时调整刀盘达到预设的理想切深。本发明能够实时控制精准刀盘的入土深度,有利于避免出现甘蔗根茬高度不一、根茬破头等问题。
技术研发人员:刘庆庭,张心盎,武涛,邹小平,徐凤英,张增学,罗菊川,潘伟进,王志琛
受保护的技术使用者:华南农业大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!