一种烟支抽检复合机器人的制作方法
本发明涉及烟支检测设备,尤其涉及的是一种烟支抽检复合机器人。
背景技术:
1、目前,对烟支物理指标的检测完全由人工完成,依次经过机台人工取样、人工送样、人工放置,再进行检测。对检测结果需要人工统计再进行人工判断取样频次,人工劳动强度大,检测效率低下。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供了一种烟支抽检复合机器人,以降低人工劳动强度,提高烟支检测的效率。
2、本发明是通过以下技术方案实现的:
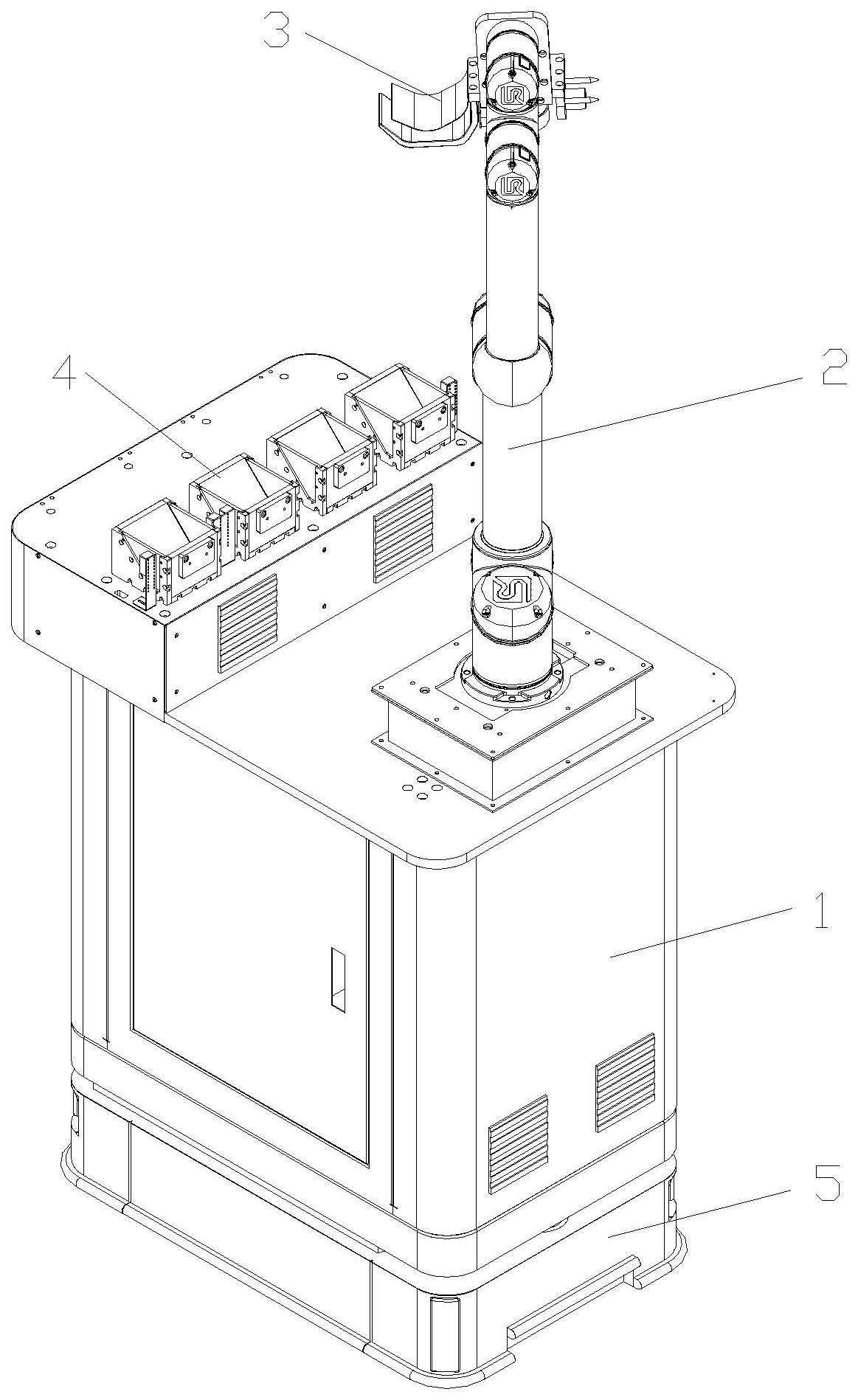
3、一种烟支抽检复合机器人,包括机体、机械臂、执行机构、烟支暂存机构,
4、机体底部设有移动底座;
5、机械臂的连接端设置在机体上,机械臂的工作端安装执行机构,通过机械臂带动执行机构运动;
6、执行机构包括安装在机械臂工作端上的执行架,执行架上设置有用于对烟支进行取样的挖爪以及用于对挖爪进行定位的定位组件;
7、烟支暂存机构可拆卸的安装在机体上,烟支暂存机构对经过执行机构取样来的烟支进行暂时存放。
8、作为上述复合机器人的优选方案,所述执行机构的定位组件包括视觉相机和光源,视觉相机和光源分别安装在执行架上且上下排列,视觉相机的镜头以及光源的照射方向均朝下。
9、作为上述复合机器人的优选方案,所述执行机构的定位组件还包括距离传感器,距离传感器安装在执行架上,距离传感器用于检测其与烟支之间的竖向距离。
10、作为上述复合机器人的优选方案,所述烟支暂存机构包括多个暂存箱,多个暂存箱分别可拆卸地置于机体上,每个暂存箱上设有顶部敞口的暂存空腔,暂存空腔的底壁倾斜设置。
11、作为上述复合机器人的优选方案,所述暂存箱一侧设有磁吸块,磁吸块上开有两个定位销孔,所述执行架一侧设有电磁铁和两个定位销,通过磁吸块与电磁铁之间的磁性吸附力以及两个定位销与两个定位销孔之间的配合,实现暂存箱与执行架的磁性定位吸附。
12、作为上述复合机器人的优选方案,所述暂存箱底部设有两个定位柱,机体上开有与暂存箱底部的定位柱相插接配合的定位孔。
13、作为上述复合机器人的优选方案,所述机械臂的连接端通过升降装置与机体相连接,升降装置的固定端设置在机体上,升降装置的活动端上设置机械臂的连接端。
14、作为上述复合机器人的优选方案,所述升降装置包括安装基座、升降动力传递装置、升降基座,安装基座固定在机体上,安装基座上设有多个竖向延伸的导向杆,升降基座与多个导向杆滑动配合,升降动力传递装置设置在安装基座上,通过升降动力传递装置带动升降基座沿着竖向升降。
15、作为上述复合机器人的优选方案,所述机械臂为六轴机械臂。
16、本发明相比现有技术具有以下优点:
17、本发明提供的一种烟支抽检复合机器人,其通过移动底座带动机器人整体移动,通过机械臂带动执行机构运动,利用执行机构的挖爪对烟支进行取样,并通过烟支暂存机构对取样的烟支进行暂时存储,之后再利用执行机构带动烟支暂存机构实现对其内暂存烟支的送样和放置,从而实现了烟支从取样、送样到放置整个过程的自动化进行,降低了人工劳动强度,提高了烟支检测效率。
技术特征:
1.一种烟支抽检复合机器人,其特征在于:包括机体(1)、机械臂(2)、执行机构(3)、烟支暂存机构(4),
2.如权利要求1所述的一种烟支抽检复合机器人,其特征在于:所述执行机构(3)的定位组件包括视觉相机(13)和光源(14),视觉相机(13)和光源(14)分别安装在执行架(11)上且上下排列,视觉相机(13)的镜头以及光源(14)的照射方向均朝下。
3.如权利要求2所述的一种烟支抽检复合机器人,其特征在于:所述执行机构(3)的定位组件还包括距离传感器(15),距离传感器(15)安装在执行架(11)上,距离传感器(15)用于检测其与烟支之间的竖向距离。
4.如权利要求1所述的一种烟支抽检复合机器人,其特征在于:所述烟支暂存机构(4)包括多个暂存箱(16),多个暂存箱(16)分别可拆卸地置于机体(1)上,每个暂存箱(16)上设有顶部敞口的暂存空腔(18),暂存空腔(18)的底壁倾斜设置。
5.如权利要求4所述的一种烟支抽检复合机器人,其特征在于:所述暂存箱(16)一侧设有磁吸块(19),磁吸块(19)上开有两个定位销孔(20),所述执行架(11)一侧设有电磁铁(21)和两个定位销(22),通过磁吸块(19)与电磁铁(21)之间的磁性吸附力以及两个定位销(22)与两个定位销孔(20)之间的配合,实现暂存箱(16)与执行架(11)的磁性定位吸附。
6.如权利要求4所述的一种烟支抽检复合机器人,其特征在于:所述暂存箱(16)底部设有两个定位柱(17),机体(1)上开有与暂存箱(16)底部的定位柱(17)相插接配合的定位孔。
7.如权利要求1所述的一种烟支抽检复合机器人,其特征在于:所述机械臂(2)的连接端通过升降装置与机体(1)相连接,升降装置的固定端设置在机体(1)上,升降装置的活动端上设置机械臂(2)的连接端。
8.如权利要求7所述的一种烟支抽检复合机器人,其特征在于:所述升降装置包括安装基座(6)、升降动力传递装置、升降基座(8),安装基座(6)固定在机体(1)上,安装基座(6)上设有多个竖向延伸的导向杆(9),升降基座(8)与多个导向杆(9)滑动配合,升降动力传递装置设置在安装基座(6)上,通过升降动力传递装置带动升降基座(8)沿着竖向升降。
9.如权利要求1所述的一种烟支抽检复合机器人,其特征在于:所述机械臂(2)为六轴机械臂(2)。
技术总结
本发明公开了一种烟支抽检复合机器人,包括机体、机械臂、执行机构、烟支暂存机构,机体底部设有移动底座;机械臂的连接端设置在机体上,机械臂的工作端安装执行机构,通过机械臂带动执行机构运动;执行机构包括安装在机械臂工作端上的执行架,执行架上设置有用于对烟支进行取样的挖爪以及用于对挖爪进行定位的定位组件;烟支暂存机构可拆卸的安装在机体上,烟支暂存机构对经过执行机构取样来的烟支进行暂时存放。本发明相比现有技术具有以下优点:降低了人工劳动强度,提高了烟支检测效率。
技术研发人员:陶芳,葛宗国,丁士海,王冬梅,李青松,徐迎波,张伟,徐尚军,汤旭东,汪珩,李红中
受保护的技术使用者:安徽中烟工业有限责任公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!