一种烟支取样器装置的制作方法
本发明涉及烟支检测设备,尤其涉及一种烟支取样器装置。
背景技术:
1、在烟支生产过程中,为了保证产品质量,需要定期检测烟支质量是否合格。
2、由于传统的烟支检测器装置自动化程度低,操作频繁。当产品需要检测时,且由操作工间隔半个小时从机器中取出相应数量的样品放入到烟支检测器中。通过烟支检测器装置检测出来的数据来判断产品质量是否合格,以及是否调整机器参数以达到每个周期内的质量要求。
3、传统的人工取样,有以下缺点:
4、(1)当操作工在操作其他工位时,使得操作无法及时准确的检测各个时间段的产品质量,进而带来质量隐患。
5、(2)间隔时间短且操作频繁,也无形间增加了工人劳动强度,进而降低生产效率。
6、(3)手动取出样品,易引起样品烟支形变及表面污损,进而影响检测数据。
技术实现思路
1、本发明提供了一种烟支取样器装置,以解决上述现有技术中的技术问题。
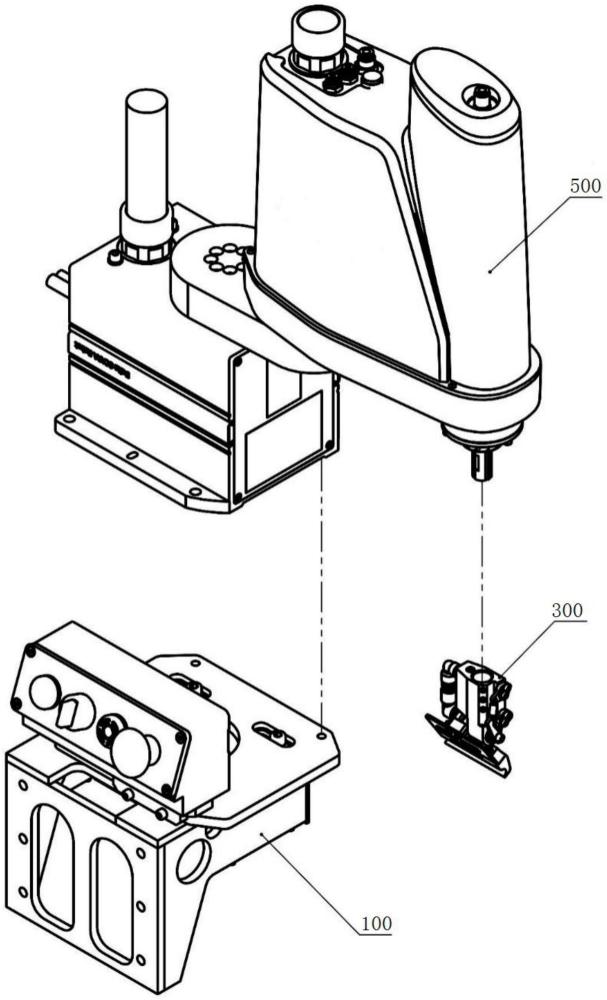
2、本发明采用的技术方案是:提供一种烟支取样器装置,包括:支撑底座、关节机器人以及机械手总成;所述关节机器人安装在所述支撑底座上,并驱动机械手总成按设定路线移动;所述机械手总成通过负压吸取烟支。
3、进一步的,所述支撑底座包括支撑架、真空发生组件、按钮组件以及开关盒支架;所述真空发生组件安装在所述支撑架内;所述开关盒支架安装在支撑架上;所述按钮组件安装在所述开关盒支架内。
4、进一步的,所述按钮组件包括警指示灯、手动开关、蜂鸣器和急停开关。
5、进一步的,所述真空发生组件包括通过管路依次连接的电磁阀、真空发生器和分流器。
6、进一步的,所述分流器上还安装有负压传感器。
7、进一步的,所述关节机器人为水平关节机器人,所述水平关节机器人内设置有负压管路,所述负压管路与分流器通过管路相连,所述水平关节机器人末端设置有空心轴。
8、进一步的,所述机械手总成包括:连接块、轴、导气块和抓取机械手;所述连接块与空心轴密封连接;所述连接块顶部设置有l型导气孔,所述轴上设置有l型气道,所述轴一端通过管路与l型导气孔密封相连,所述轴另一端转动安装在所述连接块底部;所述抓取机械手通过导气块密封连接在所述轴的侧面;所述抓取机械手上设置有条形负压孔;所述连接块的l型导气孔、轴的l型气道、导气块和抓取机械手上的条形负压孔之间形成密闭负压通道。
9、进一步的,所述抓取机械手上还设置有与烟支相匹配的弧形凹槽,所述条形负压孔设置于弧形凹槽中。
10、进一步的,所述连接块上还设置有限制抓取机械手摆动幅度及起到缓冲作用的弹簧缓冲组件。
11、进一步的,所述弹簧缓冲组件包括:拉簧固定块、限位块a、拉伸弹簧和限位块b;所述限位块a、拉簧固定块和限位块b均转动安装在所述连接块上;所述限位块a和限位块b上均开设有弧形限位槽,所述限位块a和限位块b上的弧形限位槽内均设置有一个紧定螺钉;所述拉伸弹簧两端分别连接在限位块a和拉簧固定块上;所述限位块b一端抵触在所述拉簧固定块一侧。
12、本发明的有益效果是:
13、1.本发明的烟支取样器装置运行后无需人为干预,定期检测保证产品生产质量,操作简单、集成度高、便于维护,运行稳定可靠。
14、2.本发明的烟支取样器装置大大减轻了工人劳动强度,间接提高了生产效率。
15、3.样品烟支通过机械手总成负压吸附抓取,避免因人为产生形变污损,因此检测数据准确。
16、4.机械手总成可确保每次只取样一支烟,杜绝因吸风溢出取样多支烟导致在线物测台堵塞的现象,可有效防止物测台因取样多支烟造成后续机械形变。
17、6.机械手总成可确保输送通道烟支流的稳定,有效避免取样造成储烟桶卡烟现象,从而将在线物测台从出现卡烟的关键因子中排除。
18、7.机械手总成可有效降低取样器刚性冲击故障率,安装维护方便,免维修设计。
技术特征:
1.一种烟支取样器装置,其特征在于,包括:支撑底座、关节机器人以及机械手总成;所述关节机器人安装在所述支撑底座上,并驱动机械手总成按设定路线移动;所述机械手总成通过负压吸取烟支。
2.根据权利要求1所述的烟支取样器装置,其特征在于,所述支撑底座包括支撑架、真空发生组件、按钮组件以及开关盒支架;所述真空发生组件安装在所述支撑架内;所述开关盒支架安装在支撑架上;所述按钮组件安装在所述开关盒支架内。
3.根据权利要求2所述的烟支取样器装置,其特征在于,所述按钮组件包括警指示灯、手动开关、蜂鸣器和急停开关。
4.根据权利要求2所述的烟支取样器装置,其特征在于,所述真空发生组件包括通过管路依次连接的电磁阀、真空发生器和分流器。
5.根据权利要求4所述的烟支取样器装置,其特征在于,所述分流器上还安装有负压传感器。
6.根据权利要求5所述的烟支取样器装置,其特征在于,所述关节机器人为水平关节机器人,所述水平关节机器人内设置有负压管路,所述负压管路与分流器通过管路相连,所述水平关节机器人末端设置有空心轴。
7.根据权利要求6所述的烟支取样器装置,其特征在于,所述机械手总成包括:连接块、轴、导气块和抓取机械手;所述连接块与空心轴密封连接;所述连接块顶部设置有l型导气孔,所述轴上设置有l型气道,所述轴一端通过管路与l型导气孔密封相连,所述轴另一端转动安装在所述连接块底部;所述抓取机械手通过导气块密封连接在所述轴的侧面;所述抓取机械手上设置有条形负压孔;所述连接块的l型导气孔、轴的l型气道、导气块和抓取机械手上的条形负压孔之间形成密闭负压通道。
8.根据权利要求7所述的烟支取样器装置,其特征在于,所述抓取机械手上还设置有与烟支相匹配的弧形凹槽,所述条形负压孔设置于弧形凹槽中。
9.根据权利要求7所述的烟支取样器装置,其特征在于,所述连接块上还设置有限制抓取机械手摆动幅度及起到缓冲作用的弹簧缓冲组件。
10.根据权利要求9所述的烟支取样器装置,其特征在于,所述弹簧缓冲组件包括:拉簧固定块、限位块a、拉伸弹簧和限位块b;所述限位块a、拉簧固定块和限位块b均转动安装在所述连接块上;所述限位块a和限位块b上均开设有弧形限位槽,所述限位块a和限位块b上的弧形限位槽内均设置有一个紧定螺钉;所述拉伸弹簧两端分别连接在限位块a和拉簧固定块上;所述限位块b一端抵触在所述拉簧固定块一侧。
技术总结
本发明公开了一种烟支取样器装置,包括:支撑底座、关节机器人以及机械手总成;所述关节机器人安装在所述支撑底座上,并驱动机械手总成按设定路线移动;所述机械手总成通过负压吸取烟支。本发明的烟支取样器装置运行后无需人为干预,操作简单、集成度高、便于维护,运行稳定可靠。且烟支取样器装置大大减轻了工人劳动强度,间接提高了生产效率。
技术研发人员:曾泆翔,张文,袁舒,尹新龙,贺俊尧,吴关雨,刘颖,王林,冯炎春,周瑾,张佩琳,钟东怀,卿松,倪纯毅,刘丹,黄科
受保护的技术使用者:四川中烟工业有限责任公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!