瓣膜切开器和瓣膜切开系统
1.本发明涉及医疗器械技术领域,尤其涉及一种瓣膜切开器和瓣膜切开系统。
背景技术:
2.主动脉瓣狭窄主要由风湿热的后遗症、先天性主动脉瓣结构异常或老年性主动脉瓣退化或钙化所致。参阅图1a和图1b,图1a中为正常的主动脉瓣膜,图1b中为狭窄程度不同的瓣膜。正常成人主动脉的瓣膜2处的瓣口1面积应≥3.0cm2,当主动脉瓣膜3发生狭窄,主动脉瓣口4的面积缩小至正常的1/3或更小时,会对血流产生阻塞,当瓣口4的面积≤1.5cm2时,跨瓣压差和血流流速增高,一方面可造成全身各个脏器的血液供应不足,另一方面可产生冠状动脉血流量相对减少致使心脏供氧不足,最终可能导致心律失常、肺动脉高压、冠心病、心功能不全等并发症。一般来说,在代偿期,患者可能无典型的临床症状;而在失代偿期,患者可出现各种症状,如乏力、劳力性呼吸困难、心绞痛、眩晕或晕厥,甚至有10%~20%的概率发生心源性猝死。
3.按照主动脉瓣狭窄不同的病变结构形式分类,有二叶瓣畸形、三叶瓣畸形等,其中常见的为二叶瓣畸形。参阅图2,二叶瓣畸形即主动脉瓣先天性只有两个瓣叶5,称为二叶主动脉瓣(bicuspid aortic valve,bav),另外在主动脉瓣叶分类标准中,也将本来三叶瓣膜因为钙化融合导致的类似于二叶瓣膜的情况归类在bav。bav是最常见的先天性主动脉瓣狭窄畸形,在人群中的患病率约为2%,其解剖学结构特殊,瓣叶5形态不对称,窦部椭圆率较大,瓣口6处血流受阻、流速增高,易形成涡流。
4.现有技术中,可通过二叶经皮主动脉瓣膜切开器切割瓣膜粘连部位,从而治疗瓣膜狭窄。然而,主动脉瓣膜切开器存在以下技术问题:
5.1)剪臂刀刃打开后呈一字型,与瓣膜之间呈平行状态,剪臂与瓣膜之间接触面积过大,需要很大的拉力才能切割开瓣膜;
6.2)剪臂打开后的长度是固定的,不能变化,那么切开器所能切割的长度也不能变化,而生理解剖结构不同、钙化程度不同,粘连程度不同的瓣膜各自所需要的切割长度应是不同的,切开器的结构将不能有效调整、控制切割长度,可能导致切割不完全或者过度切割的问题。
技术实现要素:
7.为了解决上述技术问题或者至少部分地解决上述技术问题,本发明提供了一种瓣膜切开器和瓣膜切开系统。
8.第一方面,本发明提供了一种瓣膜切开器,包括:两个剪臂和连接所述两个剪臂的驱动组件,所述两个剪臂呈交叉转动连接,每个所述剪臂背离另一所述剪臂的一侧设有刀刃,所述驱动组件用于驱动所述两个剪臂呈打开状态或闭合状态;当所述两个剪臂处于打开状态时,所述两个剪臂之间的夹角小于180
°
,当所述两个剪臂处于闭合状态时,所述两个剪臂基本叠合。
9.第二方面,本发明提供了一种瓣膜切开系统,包括:管体组件、手柄、及上述的瓣膜切开器,所述管体组件的近端连接所述手柄,所述管体组件的远端连接所述驱动组件,所述手柄用于通过所述管体组件控制所述两个剪臂打开或闭合。
10.第三方面,本发明提供了一种瓣膜切开系统,包括:管体组件及上述的瓣膜切开器,所述管体组件包括外管和套设于所述外管中的内管,所述内管可相对于所述外管移动,所述外管的远端与所述支撑件的近端固定连接,所述内管的远端与所述滑动件的近端固定连接。
11.第四方面,本发明提供了一种瓣膜切开系统,包括:管体组件及上述的瓣膜切开器,所述管体组件包括外管和套设于所述外管中的内管,所述内管可相对于所述外管移动,所述外管的远端与所述支撑件的近端固定连接,所述内管的远端与所述传动件的近端固定连接。
12.第五方面,本发明提供了一种瓣膜切开系统,包括:手柄及上述的瓣膜切开器,所述手柄包括操控件,所述操控件用于控制所述驱动件驱动所述两个剪臂分别转动或同时转动。
13.本发明实施例提供的上述技术方案与现有技术相比具有如下优点:
14.本发明实施例提供的瓣膜切开器,当两个剪臂处于打开状态时,两个剪臂相背的刀刃可切割瓣膜。一方面,由于两个剪臂打开时之间的夹角小于180
°
,刀刃相对瓣膜倾斜,在切割过程中刀刃与瓣膜之间的接触类似于点接触,接触面积小,刀刃能较容易地切割开瓣膜,所需的拉力较小;另一方面,驱动组件可以根据不同的瓣膜粘连程度,控制两个剪臂的打开角度来控制对瓣膜的切割范围,使得切割较精准,避免了切割不完全或者过度切割的问题。
附图说明
15.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
17.附图中:
18.图1a是正常开放状态及闭合状态的主动脉瓣;
19.图1b是狭窄程度不同的主动脉瓣;
20.图2是二叶瓣畸形的主动脉瓣;
21.图3为本发明实施例一的瓣膜切开器处于打开状态的正视图;
22.图4为本发明实施例一的瓣膜切开器处于打开状态的局部剖视图;
23.图5为本发明实施例一的瓣膜切开器中支撑件的立体视图;
24.图6为本发明实施例一的瓣膜切开器处于闭合状态的正视图;
25.图7为本发明实施例一的瓣膜切开器处于闭合状态的局部爆炸视图;
26.图8为本发明实施例一的瓣膜切开器中滑动件的立体视图;
27.图9为本发明实施例一的瓣膜切开器中剪臂的立体视图;
28.图10为本发明实施例一的瓣膜切开器中连杆的立体视图;
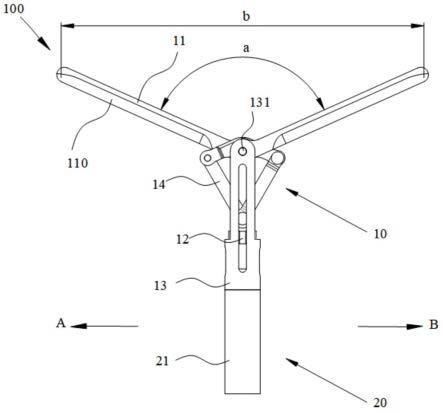
29.图11为本发明实施例一的瓣膜切开器处于打开状态的局部爆炸视图;
30.图12为本发明实施例一的瓣膜切开系统的立体视图;
31.图13为本发明实施例一的瓣膜切开器刚进入瓣膜时剪臂关闭时的侧视图;
32.图14为图13中虚线圆圈部分的局部放大视图;
33.图15为本发明实施例一的瓣膜切开器刚进入瓣膜时剪臂关闭时的俯视图;
34.图16为本发明实施例一的瓣膜切开器打开时的侧视图;
35.图17为图16中虚线圆圈部分的局部放大视图;
36.图18为本发明实施例一的瓣膜切开器打开到最大状态时的俯视图;
37.图19为本发明实施例二的瓣膜切开器处于打开状态的局部爆炸视图;
38.图20为本发明实施例二的瓣膜切开器处于打开状态的另一局部爆炸视图;
39.图21为本发明实施例三的瓣膜切开器处于打开状态的立体视图;
40.图22为本发明实施例三的瓣膜切开系统处于打开状态的正视图;
41.图23为本发明实施例三的瓣膜切开器的局部爆炸视图;
42.图24为本发明实施例三的瓣膜切开器处于打开状态的局部剖视图;
43.图25为本发明实施例三的瓣膜切开器中剪臂的立体视图;
44.图26为本发明实施例三的瓣膜切开器中连接件的立体视图;
45.图27为本发明实施例三的瓣膜切开系统中操控件的结构示意图;
46.图28为本发明实施例四的瓣膜切开系统处于打开状态的局部正视图。
具体实施方式
47.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。以下描述中,需要理解的是,“前”、“后”、“上”、“下”、“左”、“右”、“纵”、“横”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“头”、“尾”等指示的方位或位置关系为基于附图所示的方位或位置关系、以特定的方位构造和操作,仅是为了便于描述本技术方案,而不是指示所指的装置或元件必须具有特定的方位,因此不能理解为对本发明的限制。
48.还需要说明的是,除非另有明确的规定和限定,“安装”、“相连”、“连接”、“固定”、“设置”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。当一个元件被称为在另一元件“上”或“下”时,元件能够“直接地”或“间接地”位于另一元件之上,或者也可能存在一个或更多个居间元件。术语“第一”、“第二”、“第三”等仅是为了便于描述本技术方案,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,由此,限定有“第一”、“第二”、“第三”等的特征可以明示或者隐含地包括一个或者更多个特征。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
49.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
50.在本发明的描述中,需要说明的是,在介入医疗器械领域,近端是指距离操作者较近的一端,而远端是指距离操作者较远的一端;轴向是指平行于医疗器械远端中心和近端中心连线的方向。上述定义只是为了表述方便,并不能理解为对本发明的限制。
51.实施例一
52.参阅图3-图18,本发明实施例一提供的瓣膜切开器100包括两个剪臂11和连接两个剪臂11的驱动组件10。两个剪臂11呈交叉转动连接,每个剪臂11背离另一剪臂11的一侧设有刀刃110。驱动组件10用于驱动两个剪臂11打开或闭合。当两个剪臂11处于打开状态时,两个剪臂11之间的夹角小于180
°
;当两个剪臂11处于闭合状态时,两个剪臂11基本叠合。
53.上述瓣膜切开器100,当两个剪臂11处于打开状态时,两个剪臂11相背的刀刃110可切割瓣膜。一方面,由于两个剪臂11打开时之间的夹角小于180
°
,刀刃110相对瓣膜倾斜,在切割过程中刀刃110与瓣膜之间的接触类似于点接触,接触面积小,刀刃110能较容易地切割开瓣膜,所需的拉力较小;另一方面,驱动组件10可以根据不同的瓣膜粘连程度,控制两个剪臂11的打开角度来控制对瓣膜的切割范围,使得切割较精准,避免了切割不完全或者过度切割的问题。
54.可以理解,瓣膜切开器100设置两个剪臂11,且每个剪臂11背离另一剪臂11的一侧设置有刀刃110,这样剪臂11可以伸入到瓣膜组织中并对瓣膜粘连的部分进行切割。瓣膜切开器100设有驱动组件10来驱动两个剪臂11交叉转动,驱动组件10可以控制两个剪臂11打开的角度,通过调节剪臂11打开的角度可以控制两个刀刃110在瓣膜粘连处的切割长度。当驱动组件10驱动两个剪臂11打开,两个剪臂11之间的夹角小于180
°
;当驱动组件10驱动两个剪臂11闭合,两个剪臂11基本叠合。这样,在瓣膜切开器100伸入到瓣膜组织的过程中,可以使两个剪臂11处于闭合状态,便于输送;在到达切割位置时,驱动组件10控制两个剪臂11打开的角度来控制对瓣膜的切割范围,使得瓣膜切割更加精准,避免切割不完全或者过度切割,减少不必要的手术创伤,提高手术的成功率。
55.具体地,每个剪臂11的一端与驱动组件10连接,另一端悬空,两个剪臂11在交叉连接处可以通过枢接等方式转动连接。驱动组件10通过同时驱动两个剪臂11的一端相向或背向运动以分别实现两个剪臂11的闭合或打开。两个剪臂11的打开角度大小可以连续调节,即可以通过驱动组件10控制两个剪臂11的一端的运动来实现,例如,若要增大两个剪臂11之间的打开角度,可以控制两个剪臂11与驱动组件10连接的一端彼此背向运动即可,反之亦然。两个剪臂11分别在交叉连接处到悬空的一端之间设置刀刃110,两个刀刃110的刃口方向彼此背向设置,从而在两个剪臂11的打开和闭合过程中实现对瓣叶黏连的切割。
56.在图3和图6的实施方式中,两个剪臂11的之间的夹角a的范围为-4
°
至130
°
。当两个剪臂11处于打开状态时,两个剪臂11的远端与两个剪臂11的交叉连接处呈v字型。当两个剪臂11打开的角度达到最大角度130
°
时,两个剪臂11最大的切割长度b的范围为28cm至30cm。当两个剪臂11处于闭合状态时,两个剪臂11之间的夹角a的范围为-4
°
至0
°
,此时两个剪臂11基本叠合,且呈现一字型结构。
57.参阅3和图4,驱动组件10包括滑动件12、具有中空内腔的支撑件13和两个连杆14。两个剪臂11转动连接支撑件13的远端,两个连杆14的远端分别与两个剪臂11的近端转动连接,两个连杆14的近端与滑动件12的远端转动连接,滑动件12可滑动地穿设于支撑件13的
中空内腔中。这样,由于两个剪臂11转动连接着支撑件13的远端,滑动件12在支撑件13的中空内腔中做轴向运动,通过两个连杆14同时带动两个剪臂11转动,从而使两个剪臂11呈打开状态或闭合状态。当滑动件13朝远端c滑动时,带动连杆14朝支撑件13的径向向外运动使两个剪臂11背向运动,即驱动两个剪臂11打开;当滑动件12朝近端d滑动时,带动连杆14朝支撑件13的径向向内运动而使两个剪臂11相向转动,即驱动两个剪臂11闭合。两个剪臂11之间的角度可以通过控制滑动件12的滑动进程来实现。
58.具体地,参阅图4、图5和图9,两个剪臂11通过第一连接件131与支撑件13的远端转动连接,第一连接件131贯穿两个剪臂11并固定在支撑件131的远端,两个剪臂11可绕第一连接件131相对于支撑件13的远端转动。每个剪臂11上设置有第一连接孔111,支撑件131的侧壁上也设置有相对的两个第二连接孔132,第一连接件131贯穿第一连接孔111和第二连接孔132。第一连接件131优选销钉或铆钉,能够保证两个剪臂11分别在两个连杆14的带动下绕第一连接件131转动。
59.参阅图3、图6和图7,两个剪臂11绕第一连接件131呈交叉状态。当两个剪臂11处于打开状态时,一个剪臂11的远端位于瓣膜切开器100中心线的a方向,剪臂11的近端位于瓣膜切开器100中心线的b方向,a方向与b方向沿瓣膜切开器100中心线相对称。相应的另一个剪臂11的远端位于b方向,剪臂11的近端位于a方向。
60.支撑件13具有中空内腔,滑动件12在支撑件13的中空内腔中做轴向运动,从而通过连杆14带动剪臂11运动。这样,当滑动件12驱动连杆14做运动时,连杆14带动剪臂11呈打开状态或呈闭合状态。当两个剪臂11处于打开状态时,两个剪臂11之间的夹角小于180
°
,两个剪臂11位于第一连接件131远侧的部分基本呈v字型。当两个剪臂11处于关闭状态时,两个剪臂11基本叠合,整体呈一字型,且两个剪臂11叠合后的整体宽度尺寸c小于支撑件13的外径尺寸,这样能够保证瓣膜切开器100顺利地通过作为通道使用的可调弯鞘。
61.支撑件13的侧壁开设有两个相对的活动槽133,两个连杆13分别设于活动槽133内,两个剪臂11部分设于活动槽133中。可以理解,在闭合状态时,剪臂11的近端位于活动槽133内。这样,通过活动槽133的设置,连杆14和剪臂11的活动空间增加,便于连杆14带动剪臂11运动,且活动槽133的设置还可以使得两个剪臂11闭合时可以部分容纳于支撑件13的中空内腔中,便于剪臂11通过可调弯鞘。
62.参阅图4和图8,滑动件12包括平台121和设于平台121远端的第一连接部122,平台121与支撑件13的侧壁相配合,两个连杆14的近端与第一连接部122转动连接。这样,滑动件12在支撑件13的侧壁包围形成的中空内腔中滑动,平台121与第一连接部122固定连接,平台121带动第一连接部122在中空内腔中滑动,第一连接部122与两个连杆14连接,第一连接部122带动两个连杆14转动。两个连杆14在滑动件12的带动下,相对滑动件12转动,两个连杆14分别控制两个剪臂11的转动。由此,通过控制滑动件12的滑动,可以控制两个剪臂11的打开角度,根据不同瓣膜的狭窄程度,控制两个剪臂11之间的角度,从而控制两个剪臂11的切割长度。
63.优选地,平台121的周侧间隔设置有凸起结构123,凸起结构123减少了与支撑件13的侧壁接触面积,使得滑动件12的滑动更加平稳,减少了两个剪臂11的晃动,在切割瓣膜时,易于控制切割的深度和角度。
64.两个连杆14的近端通过第二连接件145与第一连接部122转动连接。具体地,连杆
14的近端开设有第三连接孔142,第一连接部122上开设有第四连接孔124,第三连接孔142与第四连接孔124叠合,第二连接件145贯穿第三连接孔142和第四连接孔124,使得连杆14可绕第二连接件142相对于第一连接部122转动。第二连接件145优选销钉或铆钉,能够保证两个连杆14在滑动件12的滑动下绕第二连接件145转动。
65.平台121的周侧与支撑件13的侧壁之间具有良好的配合关系,且平台121的周侧与支撑件13的侧壁存在一定的间隙,但间隙不宜过大,间隙过大将导致滑动件12在支撑件13的中空内腔中沿轴向运动的过程中具有较大的径向晃动,从而导致剪臂11的晃动,引发一系列不良的后果。优选地,平台121的周侧与支撑件13的侧壁的单边间隙应控制在0.01-0.05mm范围内。
66.为了保证剪臂11在打开和闭合过程中的稳定性,防止剪臂11与支撑件13的远端之间存在较大的间隙导致剪臂11在打开和闭合过程中大幅度晃动,剪臂11与支撑件13之间应配合良好,间隙应保证在合理的范围之内。优选的,剪臂11与支撑件13的远端配合部位的单边间隙的范围应控制在0.01mm-0.05mm。进一步地,参阅图4和图9,为了防止两个剪臂11相互之间的晃动或者在使用过程中的剪臂11变形导致两个剪臂11之间形成交错或干涉,而影响到剪臂11正常的打开或闭合,剪臂11包括第一凸台112,第一凸台112设置在剪臂11与支撑件13的连接处。具体地,两个剪臂11上分别设置有第一凸台112,两个第一凸台112相对设置,两个第一凸台112使得两个剪臂11在与支撑件13通过第一连接件131连接好后具有一定的间隙,减少因剪臂11变形或晃动造成剪臂11相互交错、干涉的可能,保证剪臂11能够正常地打开和闭合。
67.参阅图9,剪臂11的远端为圆弧状结构113。具体地,每一剪臂11在其背离另一剪臂11的一侧单侧开刃,剪臂11远端为光滑的圆弧状结构113,即刀刃110未完全贯通剪臂11,在靠近剪臂11远端处截止,从而在剪臂11远端处形成一个未开刃的钝口。如果刀刃110完全贯通剪臂11,且在远端形成锋利的刀刃110,当剪臂11在打开到最大工作角度时,剪臂11远端将存在一定可能与血管或组织内壁接触,此时锋利的刀刃110将在瓣膜切开器100工作时划伤或划破血管或组织,对人体造成一定的损伤和风险。而剪臂11远端设为光滑的圆弧状结构113,刀刃110不完全贯通剪臂11,在靠近剪臂11远端处留下一段未开刃的钝口则避免了对人体的损伤和风险。
68.参阅图4和图10,连杆14包括第二凸台141,第二凸台141设置在连杆14与剪臂11近端的连接处。为防止剪臂11与连杆14在连接处存在的间隙导致剪臂11在打开或闭合过程中摆动,在连杆14上设置有第二凸台141,使得连杆141与剪臂11的近端在连接处能贴合在一起,消除间隙的影响。
69.两个剪臂11的近端分别通过第三连接件147与两个连杆14的远端转动连接。具体地,剪臂11的近端开设有第五连接孔114,第二凸台141上开设有贯穿连杆14的第六连接孔146,第六连接孔146与第五连接孔114叠合,第三连接件147贯穿第六连接孔146和第五连接孔114,使得剪臂11和连杆14可以绕第三连接件147相对转动。第三连接件147优选销钉或铆钉。
70.值得一提的是,瓣膜切开器100应通过外部图像引导进入到治疗部位,例如计算机断层扫描(ct),荧光检查,血管内超声(ivus),光学相干断层扫描(oct),心内超声心动图(ice)等,因此在至少一个剪臂11上应设置显影部,显影部可设置在剪臂11的近端或远端,
显影材料优选铂依,铂金、钽等金属材料。
71.参阅图11,本发明实施例一还提供一种瓣膜切开系统200,包括管体组件20和瓣膜切开器100。管体组件20包括外管21和套设于外管21中的内管22,内管22可相对于外管21运动。外管21的远端与支撑件13的近端固定连接,内管22的远端与滑动件12的近端固定连接。
72.具体地,外管21具有空腔,为中空管材。外管21包括但不限于编织网管、柔性钢管、覆膜弹簧管、螺旋多股绞合线等。外管21具有良好的柔顺性,较大的抗拉强度,且在轴向受力时具有较小的轴向变形量。优选地,外管21为复合管或螺旋中空管。外管21远端与支撑件13近端通过焊接、熔接、粘接等方式实现固定连接,应保证连接处的牢固度,在工作受力时不会脱开断裂。连接方式根据所使用的外管21材料不同而有所区别。当选用复合管作为外管21时,使用熔接的方式进行连接;当使用螺旋中空管时,使用焊接的方式进行连接。
73.内管22可以为实心管,也可以为空心管。内管22应具有良好的柔顺性,较高的抗拉强度和良好的推送性能。内管22可以为柔性钢管、带芯轴弹簧管、螺旋中空管、机械软轴、螺旋多股绞合线等多种形式。内管22的远端与滑动件12的近端通过焊接、粘接、熔接、螺纹连接等方式实现刚性固定连接。为了保证连接处的连接强度,本实施例中优选焊接的方式。
74.参阅图12,瓣膜切开系统200还包括手柄23,管体组件20的近端连接手柄23,管体组件20的远端连接驱动组件10,手柄23用于通过管体组件20控制两个剪臂11打开或闭合。具体地,内管22的远端与滑动件12的近端固定连接,内管22的近端与设于手柄23上的操控件(未图示),如滑动结构相连。通过操作操控件,带动内管22在外管21的空腔中沿轴向运动,以控制与内管22固定连接的滑动件12在支撑件13的中空内腔中运动,从而通过连杆14驱动两个剪臂11转动,实现两个剪臂11的打开及闭合。
75.请参阅图13-图18,本实施例的瓣膜切开系统200的操作过程如下:
76.此处仅以二叶瓣畸形的主动脉瓣膜扩张为例,当然瓣膜切开系统也适用于主动脉瓣膜的三叶瓣畸形或其它瓣膜,如二尖瓣、三尖瓣、肺动脉瓣等的扩张。
77.s1、通过穿刺器在股动脉进行穿刺,穿刺完成后,在可调弯鞘引导下输送瓣膜切开系统200,使得瓣膜切开器100经股动脉、主动脉弓到达主动脉瓣。
78.s2、在外部显影设备的引导下将瓣膜切开器100穿过狭窄的主动脉瓣,使得瓣膜切开器100的两个剪臂11完全位于主动脉瓣膜靠近左心室一侧。此时瓣膜切开器100的两个剪臂11未打开,二叶瓣畸形的主动脉瓣膜瓣叶之间的交界处粘连在一起,主动脉瓣膜处于一种狭窄的状态。
79.s3、操作手柄23上的操控件控制两个剪臂11缓慢打开到一个较小的合适的角度,并在外部显影设备的引导下使得刀刃110与瓣膜粘连部位相对准。
80.s4、握住手柄23使用适当的力量将瓣膜切开系统200整体由左心室向主动脉的方向缓慢拉动,利用剪臂11上的刀刃110将粘连的主动脉瓣切割开来。在拉动过程中,根据外部显影设备的指引下,不断缓慢的、逐渐地调大两个剪臂11打开的角度a,直到切割效果达到理想状态时停止。在瓣膜切开器100的剪臂11向近端拉动的过程中,由于两个剪臂11打开成v字型,刀刃110始终相对瓣膜倾斜,刀刃110与瓣膜之间的接触类似于点接触,接触面积小,刀刃110能集中的切割瓣膜粘连部位上的某个点,能较容易地切割开瓣膜,瓣膜粘连部位逐渐地自近中心至近瓣环被切开、扩大,所需的拉力较现有技术中的线接触会大幅度减小。
81.s5、当达到主动脉瓣膜扩张的理想效果后,操作手柄23上的操控件以完全闭合两个剪臂11,随后将瓣膜切开系统200及整个输送装置撤离到体外。
82.实施例二
83.参阅图19-图20,与实施例一的瓣膜切开器100相比,本发明实施例二的瓣膜切开器300的区别在于,驱动组件30的结构不同。
84.本实施例中,剪臂31、连杆34、滑动件32的结构与实施例一相同。驱动组件30除了包括滑动件32、具有中空内腔的支撑件33和两个连杆34,还包括传动件35,传动件35活动地设于支撑件33的中空内腔中,传动件35与滑动件32的近端活动连接。具体地,传动件35设于支撑件33的中空内腔中并与支撑件33的侧壁螺纹连接,传动件35与滑动件33的近端转动连接。这样,通过传动件35带动滑动件32运动,滑动件32带动连杆34转动,连杆34带动剪臂31转动,从而通过传动件35控制剪臂31的打开和闭合。
85.上述瓣膜切开器300,当两个剪臂31处于打开状态时,两个剪臂31相背的刀刃可切割瓣膜。一方面,由于两个剪臂31打开时之间的夹角小于180
°
,刀刃相对瓣膜倾斜,在切割过程中刀刃与瓣膜之间的接触类似于点接触,接触面积小,刀刃能较容易地切割开瓣膜,所需的拉力较小;另一方面,驱动组件30可以根据不同的瓣膜粘连程度,控制两个剪臂31的打开角度来控制对瓣膜的切割范围,使得切割较精准,避免了切割不完全或者过度切割的问题。
86.可以理解,传动件35与支撑件33的侧壁为螺纹连接,传动件35上设有外螺纹,支撑件33的侧壁中设有与外螺纹配合的内螺纹。传动件35的轴向运动是靠内外螺纹之间的转动从而向远端或近端运动的,即传动件35在轴向运动的同时还有转动,而滑动件33与传动件35之间可相对转动,使得滑动件33相对于支撑件33不转动,只能沿轴向运动。传动件35的设置更加有利于两个剪臂31在受力状态下稳定保持打开角度。
87.具体的,滑动件32的周侧设置有对合的压环321,滑动件33通过对合的压环321与传动件35实现转动连接。当传动件35以轴线为中心线旋转时,传动件35边旋转边向远端或近端轴向运动。由于压环321固定连接传动件35的远端,但压环321与滑动件32转动连接,使得滑动件32不旋转而只沿轴向运动。
88.进一步的,滑动件32的近端间隔设置有第一圆柱段322、第二圆柱段323及位于第一圆柱段322和第二圆柱段323之间的环槽324。传动件35远端设置有圆孔351,滑动件32的第一圆柱段322滑动穿设于圆孔351中,压环321卡设于环槽324中,并与传动件35的远端焊接固定。滑动件32的第一圆柱段322与传动件35的圆孔351之间能够相对转动,但轴向之间没有相对运动或只有较小的相对运动。为保证滑动件32与传动件35之间转动的顺畅性,圆孔351的深度应大于滑动件32的第一圆柱段322的高度,优选的范围为0.01-0.05mm,圆孔351的直径应大于第一圆柱段322的直径,优选的范围为0.01-0.05mm。压环321的内径应大于环槽324的内径,优选的范围为0.01-0.05mm,同时,压环321的内径还应小于第一圆柱段322的直径及第二圆柱段323的直径,防止第一圆柱段322或第二圆柱段323脱出。压环321的外径还应大于圆孔351的孔径。可以预见的是,滑动件32与传动件35之间的连接方式并不限于以上方式,只要能保证两者之间能实现相互转动,但不发生轴向相对运动。
89.本发明实施例二还提供一种瓣膜切开系统,包括管体组件40和瓣膜切开器300。管体组件40包括外管41和套设于外管41中的内管42,内管42可相对于外管41移动。外管41的
远端与支撑件33的近端固定连接,内管42的远端与传动件35的近端固定连接。与实施例一的瓣膜切开系统200相比,本实施例的瓣膜切开系统的区别在于,内管42的远端与传动件35的近端固定连接。
90.瓣膜切开系统还可包括手柄,管体组件40的近端连接手柄,管体组件40的远端连接驱动组件30,手柄用于通过管体组件30控制两个剪臂31打开或闭合。具体地,内管42的远端与传动件35的近端固定连接,内管42的近端与设于手柄上的操控件(未图示),如滑动结构相连。这样,通过操作手柄上的操控件来控制内管42在外管41中的旋转,从而带动传动件35旋转并轴向移动,来使得滑动件33沿轴向移动,从而通过连杆34驱动两个剪臂31转动,实现两个剪臂31的打开及闭合。
91.具体地,实施手术时,操作手柄上的操控件(图未示)使得内管42旋转,内管42带动传动件35旋转,在支撑件33的内螺纹配合下,设有外螺纹的传动件35边旋转边沿轴向向远端运动,从而打开两个剪臂31;反之,当反向旋转时,两个剪臂31将实现闭合。传动件35与支撑件33之间的螺纹连接可以理解为锁止机构,这样能够消除因内管42与外管41之间的间隙或者内管41与外管42的轻微形变而导致的两个剪臂31之间的打开角度不能准确保持的问题。
92.实施例三
93.参阅图21-图27,与实施例一的瓣膜切开器100相比,本发明实施例三的瓣膜切开器500的区别在于,两个剪臂51的结构和驱动组件50的结构不同。
94.本实施例中,瓣膜切开器500包括两个剪臂51和驱动两个剪臂51转动的驱动组件50。驱动组件50包括连接件52和驱动件53。两个剪臂51的近端与连接件52转动连接。每个剪臂51的近端均设有安装座511,安装座511的周侧缠绕至少一个驱动件53。这样,通过驱动件53驱动两个剪臂51相对连接件转动,从而使两个剪臂51打开或闭合。
95.上述瓣膜切开器500,当两个剪臂51处于打开状态时,两个剪臂51相背的刀刃可切割瓣膜。一方面,由于两个剪臂51打开时之间的夹角小于180
°
,刀刃相对瓣膜倾斜,在切割过程中刀刃与瓣膜之间的接触类似于点接触,接触面积小,刀刃能较容易地切割开瓣膜,所需的拉力较小;另一方面,驱动组件50可以根据不同的瓣膜粘连程度,控制两个剪臂51的打开角度来控制对瓣膜的切割范围,使得切割较精准,避免了切割不完全或者过度切割的问题。
96.参阅图25和图26,安装座511还设有卡槽512,驱动组件50还包括固定连接于驱动件53的固定块531,固定块531卡固于卡槽512中。这样,通过固定块531与卡槽512的卡固配合,将驱动件53缠绕在安装座511的周侧。具体地,驱动件53可为驱动线,安装座511可设置为概呈圆形的安装座,安装座511上沿周侧设置有线槽514。本实施例中,驱动组件50包括至少两个驱动线,至少一个驱动线对应绕接在线槽514内,线槽514的宽度应略大于驱动线的直径,使得驱动线能完全陷入到线槽514中。驱动线绕着线槽514设置且两端分别穿过底座521上设置的轴向过线孔5211继续延伸,直至与手柄63上的操控件相连接。
97.具体的,驱动线可使用包括但不限于不锈钢缆、不锈钢丝、镍钛多股丝,尼龙线等性能合适的材料,驱动线应具有良好的柔顺性、较高的抗拉强度和刚度。在大角度弯曲下驱动线不应发生弹性或塑形变形,能承受较高的拉力,且在受力情况下不会沿轴向发生形变。优选的,本实施例中驱动线使用镍钛多股丝。
98.固定块531可选用不锈钢套,通过压接、焊接、粘接等方式固定在驱动线上,固定块531与驱动线之间的连接应牢固,驱动线受力时,固定块531与驱动线之间不应发生相对移动。固定块531能完整卡入到卡槽512中,固定块531与卡槽512之间配合紧密,保证驱动线在拉动时,剪臂51的运动能即时响应,不会存在滞后的现象。
99.请参阅图23,连接件52包括底座521和设于底座521的第二连接部522,两个剪臂51的近端与第二连接部522转动连接,驱动件53贯穿底座521。两个剪臂51的近端通过第四连接件56与连接件52的第二连接部522转动连接。具体地,剪臂51的近端设置有第七连接孔513,第二连接部522设置有第八连接孔523,第四连接件56贯穿两个剪臂51上的第七连接孔513和第二连接部522上的第八连接孔523,将两个剪臂51转动连接在第二连接部522的两侧,两个剪臂51可绕第四连接件56相对于第二连接部522转动,从而实现两个剪臂51的打开和闭合。第四连接件56可以为销钉或铆钉。
100.本发明实施例三还提供一种瓣膜切开系统,包括手柄63和瓣膜切开器500。手柄63包括操控件621,操控件621用于控制驱动件53驱动两个剪臂51同时转动。
101.请参阅图24,操控件621用于控制驱动件53驱动两个剪臂51同时转动。操控件621包括锥齿轮组,锥齿轮组包括主动齿轮622和两个从动齿轮623,两个从动齿轮623分别与主动齿轮622啮合,每个剪臂51对应的驱动件53分别连接两个从动齿轮623。
102.可以理解,两个剪臂51的打开与闭合为联动控制。驱动组件50包括两个驱动件53,即两个驱动线,每个剪臂51的安装座511周侧缠绕一个驱动线,两个驱动线分别连接两个从动齿轮623。这样,可通过主动齿轮622带动两个从动齿轮623同时转动,进而通过两个驱动线驱动两个剪臂51同时转动。进一步地,操控件621还包括旋钮625,旋钮625连接主动齿轮622,可通过转动旋钮625来使主动齿轮622转动。瓣膜切开系统还包括管体组件610,管体组件610包括外管612和内管613,外管612和内管613均与手柄63固定连接,外管和内管与手柄63之间均无相对运动。
103.具体地,两个从动齿轮623分别与主动齿轮622相互啮合且两个从动齿轮622的轴线垂直于主动齿轮622的轴线。主动齿轮622的轴与旋钮625固定连接,从动齿轮622分别与两个接线柱624连接,两个驱动线穿过管体组件610到达手柄63分别与两个接线柱624相连。这样,可通过转动旋钮625,带动主动齿轮622转动,同时将带动与之啮合的两个从动齿轮622沿相反的方向同时转动,这将随之控制固定连接在接线柱624上的两根驱动线沿着相反的方向拉动相应的固定块531,两剪臂51将在相应驱动线与固定块531的带动下伴随驱动线的运动而相对连接件52转动,从而打开两个剪臂51,且由于两根驱动线使得两剪臂51的安装座511的转动方向相反,因此两个剪臂51将沿着相反的反向转动,从而实现同时、同程度打开剪臂51的功能。反之,当反向转动旋钮时,可驱动两个剪臂51闭合。
104.继续参阅图24,两剪臂51的打开角度d应在0-170
°
之间。当打开角度d达到最大值170
°
时,两个剪臂51的最大切割长度g的范围为28-30mm。当然了,对于联动控制的结构并不只限于本实施例中列举的此种结构方案,主要以互相啮合的齿轮来实现,排布方式并不限于此。
105.实施例四
106.参阅图28,与实施例三的瓣膜切开器500相比,本发明实施例四的瓣膜切开器的区别在于,两个剪臂71的打开与闭合为单独控制。
107.本发明实施例四中两个剪臂71可以单独控制,从而实现两个剪臂71不同的打开角度。由于造成瓣膜狭窄的部位常呈现不对称分布,瓣膜两边应需要不同的切割程度,即两个剪臂71相对于瓣膜切开器的中轴线来说,应具有不同的打开角度。单独控制的剪臂71将可以根据实际瓣膜的生理解剖结构情况,分别设置两边剪臂71的打开角度,从而精准可控的控制两边具有不同的切割范围,可以适应瓣膜狭窄不对称的情况,避免造成瓣膜一边过切,一边未切割到位的情况。
108.本发明实施例四还提供的一种瓣膜切开系统,包括手柄和瓣膜切开器700,手柄包括操控件,操控件用于控制驱动件驱动两个剪臂71分别转动。
109.参阅图28,操控件用于控制驱动件驱动两个剪臂分别转动。操控件包括两个锥齿轮组,每个锥齿轮组包括互相啮合的主动齿轮和从动齿轮,每个剪臂71对应的驱动件连接一个从动齿轮。
110.可以理解,两个剪臂71的打开与闭合为单独控制。驱动组件包括两个驱动件,即两个驱动线,每个剪臂71的安装座周侧缠绕一个驱动线,两个驱动线分别连接两个从动齿轮,两个从动齿轮分别与两个主动齿轮连接。这样,可分别控制主动齿轮带动从动齿轮转动,进而通过驱动线驱动剪臂71单独转动。进一步地,操控件还包括两个旋钮,旋钮与主动齿轮一一对应连接,可通过转动旋钮来使主动齿轮转动。
111.具体地,两个驱动线可与设于手柄上的独立的两个锥齿轮组相连,每个锥齿轮组类似于图27中的锥齿轮组,但两个主动齿轮之间没有相互关联,互相之间不受影响。当然了,独立的操控件并不限于齿轮机构也可以为其它机构,重要的是能够对两个驱动线分别进行独立的控制。在手术操作时,可根据瓣膜的实际生理解剖结构,通过对应的操控件来单独控制一边的剪臂71打开至合适的角度e,然后锁定操控件固定住剪臂71,随后操作另一操控件单独控制另一边的剪臂71打开至合适的角度f,再锁定另一操控件固定住另一剪臂71以保持角度,两个剪臂71与瓣膜切开器的中轴线形成不同的夹角f、夹角e,从而两个剪臂71上的刀刃分别具有不同的最大切割长度。
112.可以理解的,以上实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制;应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,可以对上述技术特点进行自由组合,还可以做出若干变形和改进,这些都属于本发明的保护范围;因此,凡跟本发明权利要求范围所做的等同变换与修饰,均应属于本发明权利要求的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1