一种导杆环支撑式柔性针穿刺机构
1.本发明涉及一种导杆环支撑式柔性针穿刺机构,属于医疗器材设备技术领域。
背景技术:
2.伴随着制造技术的不断发展,科学技术的不断进步,先进设备的出现为医疗行业带来了新的活力;微创手术已深入到外科手术的各种领域,穿刺介入手术更是临床医学的重要技术和发展方向;刚针穿刺是传统的医疗手段,目的在于提出患者的组织细胞或者将药物输送到患者病灶位置,相对于传统刚性穿刺针,斜尖柔性针自身具有极高的弹性,刺入人体后可控制其自身的旋转速率使其在组织内做曲线运动;由柔性套管和斜尖柔性针组成的套管柔性针具有避让重要器官组织、纠正穿刺偏差的能力,可以实现多弯曲路径穿刺以避开血管及重要组织,精确的靶向穿刺。微创靶向穿刺手术因创伤面积小,术后康复快等特点。
3.针对上述背景所述,设计了一种导杆环支撑式柔性针穿刺机构;主要由柔性针、前支撑板、导杆、导杆、滑动环、柔性支撑材料、电机底座、自传电机、后支撑板、进给电机、滑块、丝杠、滑道、基座组成;进给电机带动丝杠旋转带动滑块向前运动,从而带动柔性针通过柔性支撑材料穿刺进入组织中,有效避免了柔性针在穿刺过程中针体发生弯曲的现象发生。
技术实现要素:
4.本发明的目的在于解决针穿刺过程中发生的翘曲现象,影响针穿刺精度;发明一种导杆环支撑式柔性针穿刺机构,保证在使用此穿刺机构时,柔性针在穿刺过程中不发生翘曲。
5.一种导杆环支撑式柔性针穿刺机构,其组成包括柔性针进给机构和柔性针支撑机构两部分,其中柔性针支撑机构需要实现柔性针在穿刺过程中柔性针不发生翘曲。
6.一种导杆环支撑式柔性针穿刺机构,由柔性针、前支撑板、导杆、导杆、滑动环、柔性支撑材料、电机底座、自转电机、后支撑板、进给电机、滑块、丝杠、滑道、基座组成;其特征在于:柔性支撑材料固定连接在前支撑板与电机座之间;导杆与导杆平行固定连接在前支撑板与后支撑板之间,导杆穿过滑动环,滑动环与导杆滑动配合;柔性支撑材料为一种可塑性强的材料,可随着机构的移动自由伸缩;电机座安装在滑块上,自转电机固定安装在电机座上,自转电机与柔性针通过联轴器连接,控制柔性针转动;进给电机固定安装在后支撑板上,前支撑板、后支撑板、滑道均固定安装在基座上;丝杠与前支撑板通过轴承支撑固定,丝杠与后支撑板通过轴承支撑固定,滑块安装在丝杠上,滑块与滑道滑动配合,进给电机通过控制丝杠的转动带动滑块的前后移动,从而控制柔性针的穿刺和收回。
7.作为优选,所述的滑动环滑动环两端设有导杆滑动环中间设有柔性针支撑环,并由两根细杆固定连接,中间的柔性针支撑环等距离固定在柔性支撑材料内部,柔性针与柔性针支撑环滑动配合。
8.本发明的有益效果是:1.通过五个滑动环支撑柔性针穿刺,机构稳定可靠,结构简单,避免了柔性针在穿刺时发生翘曲的现象,影响穿刺精度。
9.2.本发明所设计的是一种塑性材料嵌套滑动环支撑结构,采用塑性材料嵌套滑动环的方案,使结构更紧凑,节省材料,减轻机构重量。
附图说明
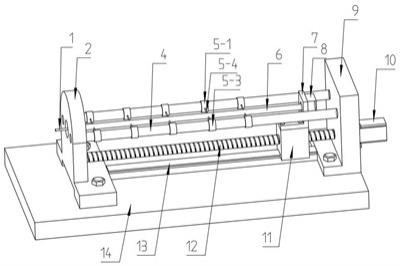
10.附图中各部件的标记如下:由柔性针1、前支撑板2、导杆3、导杆4、滑动环5、柔性支撑材料6、电机底座7、自转电机8、后支撑板9、进给电机10、滑块11、丝杠12、滑道13、基座14组成。
11.附图1,本发明的整体结构示意图。
12.附图2,本发明中滑动环示意图。
13.附图中各部件的标记如下:由柔性针1、前支撑板2、导杆3、导杆4、滑动环5、柔性支撑材料6、电机底座7、自转电机8、后支撑板9、进给电机10、滑块11、丝杠12、滑道13、基座14组成。
具体实施方式
14.为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明。但是应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
15.如图1、图2所示,本发明具体实施方式采用以下技术方案:一种导杆环支撑式柔性针穿刺机构,由柔性针1、前支撑板2、导杆3、导杆4、滑动环5、柔性支撑材料6、电机底座7、自转电机8、后支撑板9、进给电机10、滑块11、丝杠12、滑道13、基座14组成;其特征在于:柔性支撑材料6固定连接在前支撑板2与电机座8之间;导杆3与导杆4平行固定连接在前支撑板2与后支撑板10之间,导杆3穿过滑动环5,滑动环5与导杆3滑动配合;柔性支撑材料6为一种可塑性强的材料,可随着机构的移动自由伸缩;电机座8安装在滑块12上,自转电机9固定安装在电机座8上,自转电机9与柔性针1通过联轴器7连接,控制柔性针1转动;进给电机11固定安装在后支撑板10上,前支撑板2、后支撑板10、滑道14均固定安装在基座15上;丝杠13与前支撑板2通过轴承支撑固定,丝杠13与后支撑板2通过轴承支撑固定,滑块12安装在丝杠13上,滑块12与滑道13滑动配合,进给电机11通过控制丝杠13的转动带动滑块12的前后移动,从而控制柔性针1的穿刺和收回。
16.进一步的,所述的滑动环滑动环5两端设有导杆滑动环5-1中间设有柔性针支撑环5-2,并由两根细杆固定连接,中间的柔性针支撑环5-2等距离固定在柔性支撑材料6内部,柔性针1与柔性针支撑环5-2滑动配合。柔性针1与柔性针支撑环5-2滑动配合。
17.本发明具体实施方式的工作原理为:柔性支撑材料6固定连接在前支撑板2与电机座7之间,导杆3与导杆4平行固定连接在前支撑板2与后支撑板9之间,滑动环5等距离嵌套在导杆4上并与导杆4滑动配合,柔性针1与柔性针支撑环5-2滑动配合,导杆3穿过滑动环5,滑动环5与导杆3滑动配合,柔性支撑材料6为一种可塑性强的材料,可随着机构的移动自由
伸缩,电机座7安装在滑块11上,自转电机8固定安装在电机座7上,自转电机8与柔性针1通过联轴器连接,控制柔性针1转动,进给电机10固定安装在后支撑板9上,前支撑板2、后支撑板8、滑道13均固定安装在基座14上,丝杠12与前支撑板2通过轴承支撑固定,丝杠12与后支撑板2通过轴承支撑固定,滑块11安装在丝杠12上,滑块11与滑道12滑动配合,进给电机10通过控制丝杠12的转动带动滑块11的前后移动,从而控制柔性针1的穿刺和收回。
18.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种导杆环支撑式柔性针穿刺机构,由柔性针(1)、前支撑板(2)、导杆(3)、导杆(4)、滑动环(5)、柔性支撑材料(6)、电机底座(7)、自转电机(8)、后支撑板(9)、进给电机(10)、滑块(11)、丝杠(12)、滑道(13)、基座(14)组成;其特征在于:柔性支撑材料(6)固定连接在前支撑板(2)与电机座(8)之间;导杆(3)与导杆(4)平行固定连接在前支撑板(2)与后支撑板(10)之间,导杆(3)穿过滑动环(5),滑动环(5)与导杆(3)滑动配合;柔性支撑材料(6)为一种可塑性强的材料,可随着机构的移动自由伸缩;电机座(8)安装在滑块(12)上,自转电机(9)固定安装在电机座(8)上,自转电机(9)与柔性针(1)通过联轴器(7)连接,控制柔性针(1)转动;进给电机(11)固定安装在后支撑板(10)上,前支撑板(2)、后支撑板(10)、滑道(14)均固定安装在基座(15)上;丝杠(13)与前支撑板(2)通过轴承支撑固定,丝杠(13)与后支撑板(2)通过轴承支撑固定,滑块(12)安装在丝杠(13)上,滑块(12)与滑道(13)滑动配合,进给电机(11)通过控制丝杠(13)的转动带动滑块(12)的前后移动,从而控制柔性针(1)的穿刺和收回。2.根据权利要求1所述的一种导杆环支撑式柔性针穿刺机构,其特征在于,所述的滑动环滑动环(5)两端设有导杆滑动环(5-1)中间设有柔性针支撑环(5-2),并由两根细杆固定连接,中间的柔性针支撑环(5-2)等距离固定在柔性支撑材料(6)内部,柔性针(1)与柔性针支撑环(5-2)滑动配合。
技术总结
本发明介绍了一种导杆环支撑式柔性针穿刺机构,其组成包括柔性针、前支撑板、导杆、导杆、滑动环、柔性支撑材料、电机底座、自转电机、后支撑板、进给电机、滑块、丝杠、滑道、基座;柔性针通过非金属支撑管结构水平进入由柔性支撑材料包裹的滑动环内部,滑动环等距离固定嵌套在柔性支撑材料内部,滑块进给机构通过进给电机控制丝杠的转动带动其沿着滑道前后运动,同时带着柔性针在柔性支撑材料里前后移动,滑动环在滑块进给过程中支撑柔性针保证其不发生偏移,当滑块向前移动时,柔性支撑材料压缩并带动滑动环在导杆上向前运动,当所有滑动环运动到终点时会形成一个刚性的支撑结构支撑柔性针,滑块如此反复运动将柔性针刺入人体。滑块如此反复运动将柔性针刺入人体。
技术研发人员:赵燕江 侯卓辰 张永德 刘文伟 文超 张鹤 刘德强
受保护的技术使用者:哈尔滨理工大学
技术研发日:2021.09.15
技术公布日:2022/5/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1