一种新型麻醉装置的制作方法
1.本实用新型涉及医疗器械领域,特别是一种新型麻醉装置。
背景技术:
2.局部麻醉也称部位麻醉,是指在患者神志清醒状态下,将局麻药应用于身体局部,使机体某一部分的感觉神经传导功能暂时被阻断,运动神经传导保持完好或同时有程度不等的被阻滞状态,这种阻滞应完全可逆,不产生任何组织损害,局部麻醉的优点在于简便易行、安全、患者清醒、并发症少和对患者生理功能影响小。
3.现有技术中,通常是医护人员手持装有麻醉剂的注射器进行局部麻醉操作,由于麻醉药剂需要缓慢匀速,导致医护人员在长时间手持注射器注射时,手部容易产生疲劳,出现小范围的晃动,导致注射器前端的针头出现晃动,甚至出现滑动,使患者承受不必要的痛苦。
技术实现要素:
4.针对背景技术中存在的技术问题,本实用新型提出一种新型麻醉装置,其特征在于,所述新型麻醉装置包括针头、针筒、平衡细调装置、平衡粗调装置、倾角传感器、把手、距离传感器、推杆和控制器,所述平衡细调装置和所述平衡粗调装置均匀分布在所述针筒的周围,所述平衡细调装置对应设置在所述平衡粗调装置的下方,多个所述倾角传感器均匀设置在所述把手的周围,所述距离传感器和所述控制器设置在所述把手的上表面,正对所述推杆,所述控制器通过近距离通信技术实现与所述平衡细调装置、所述平衡粗调装置、所述倾角传感器和所述距离传感器的通信连接。
5.进一步地,所述平衡细调装置包括电机控制器、电机、齿轮、配重块和传动轴。
6.进一步地,所述电机控制器与所述电机电连接,所述电机连接所述齿轮。
7.进一步地,所述齿轮和所述传动轴传动连接,所述配重块设置在所述传动轴的中间位置。
8.进一步地,所述平衡粗调装置包括电流源、电磁铁和永磁铁块。
9.进一步地,所述电流源与所述电磁铁电连接。
10.进一步地,所述永磁铁块与所述平衡粗调装置的内壁滑动摩擦连接,在非受力时保持稳定状态。
11.新型麻醉装置具有如下有益效果:
12.1)平衡细调装置通过电机控制配重块的具体位置,平衡粗调装置通过电磁铁控制永磁铁块的具体位置,平衡细调装置和平衡粗调装置相互配合实现更加精准的平衡调节;
13.2)倾角传感器、距离传感器和控制器相互配合,可以实现平衡操作的自行启动和智能控制,在保证麻醉装置的稳定性的同时简化控制操作,便于医护人员使用。
附图说明
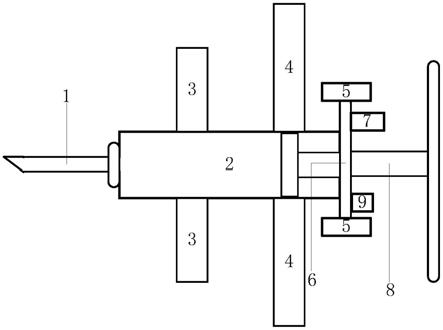
14.图1显示的是新型麻醉装置的结构图;
15.图2显示的是平衡细调装置的结构图;
16.图3显示的是平衡粗调装置的结构图。
具体实施方式
17.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现说明本实用新型的具体实施方式。
18.如图1所示,新型麻醉装置包括针头1、针筒2、平衡细调装置3、平衡粗调装置4、倾角传感器5、把手6、距离传感器7、推杆8和控制器9。平衡细调装置3和平衡粗调装置4的数量均为4个,均匀分布在针筒2的周围,平衡细调装置3对应设置在平衡粗调装置4的下方。多个倾角传感器5均匀设置在把手6的周围,用于感测新型麻醉装置相对于平面的倾角。距离传感器7和控制器9设置在把手6的上表面,距离传感器7用于检测把手6和推杆8的相对距离。控制器9通过近距离通信技术(例如zigbee、蓝牙等)实现与平衡细调装置3、平衡粗调装置4、倾角传感器5和距离传感器7的通信连接,传输数据和命令。
19.如图2所示,平衡细调装置3包括电机控制器31、电机32、齿轮33、配重块34和传动轴35,电机控制器31与电机32电连接,用于将来自控制器9的命令转化为电机控制指令,控制电机32的具体运行。电机32连接齿轮33,控制齿轮33的转动方向和转动速度。齿轮33和传动轴35传动连接,配重块34设置在传动轴35的中间位置。
20.如图3所示,平衡粗调装置4包括电流源41、电磁铁42和永磁铁块43,电流源41与电磁铁42电连接,基于来自控制器9的命令提供适当的电流给电磁铁42。永磁铁块43与平衡粗调装置4的内壁滑动摩擦连接,在非受力时保持稳定状态。电磁铁42产生适当大小的吸力或排斥力,调整永磁铁块43的具体位置。
21.上述新型麻醉装置的具体使用过程为:
22.启动距离传感器7,医护人员将新型麻醉装置的针头扎入患者的特定部位,距离传感器7检测把手6和推杆8的相对距离,当把手6和推杆8的相对距离小于特定阈值时,控制器9启动倾角传感器,检测当前新型麻醉装置相对于平面的倾角,并将其记录下来,将其作为平衡调节的目标值,在麻药的注射过程中,控制器9持续监测倾角传感器的数据,当新型麻醉装置的倾角相对于目标值出现大于特定阈值的偏差时,发送控制命令给平衡粗调装置4,平衡粗调装置4通过调节电流的大小,调节永磁铁块43的具体位置,控制新型麻醉装置在各个方向上的受力,调节完成后,检测当前的倾角偏差,若小于特定阈值,结束调整,若仍然大于特定阈值,控制器9计算产生新的控制信号,传输给平衡细调装置3,平衡细调装置3通过齿轮33和传动轴35的相互配合,调节配重块34的具体位置,通过两级调节保证麻醉装置在麻醉操作过程中的稳定性。
23.上述新型麻醉装置包括针头、针筒、平衡细调装置、平衡粗调装置、倾角传感器、把手、距离传感器、推杆和控制器,平衡细调装置通过电机控制配重块的具体位置,平衡粗调装置通过电磁铁控制永磁铁块的具体位置,平衡细调装置和平衡粗调装置相互配合可以调节新型麻醉装置在各个方向上的受力,倾角传感器、距离传感器和控制器相互配合,可以实现平衡操作的自行启动和智能控制,在保证麻醉装置的稳定性的同时简化控制操作,便于
医护人员使用。
24.以上所揭露的仅为本实用新型较佳实施例而已,当然不能以此来限定本实用新型之权利范围,因此依本实用新型权利要求所作的等同变化,仍属本实用新型所涵盖的范围。
技术特征:
1.一种新型麻醉装置,其特征在于,所述新型麻醉装置包括针头、针筒、平衡细调装置、平衡粗调装置、倾角传感器、把手、距离传感器、推杆和控制器,所述平衡细调装置和所述平衡粗调装置均匀分布在所述针筒的周围,所述平衡细调装置对应设置在所述平衡粗调装置的下方,多个所述倾角传感器均匀设置在所述把手的周围,所述距离传感器和所述控制器设置在所述把手的上表面,所述控制器通过近距离通信技术实现与所述平衡细调装置、所述平衡粗调装置、所述倾角传感器和所述距离传感器的通信连接。2.根据权利要求1所述的新型麻醉装置,其特征在于,所述平衡细调装置包括电机控制器、电机、齿轮、配重块和传动轴。3.根据权利要求2所述的新型麻醉装置,其特征在于,所述电机控制器与所述电机电连接,所述电机连接所述齿轮。4.根据权利要求2所述的新型麻醉装置,其特征在于,所述齿轮和所述传动轴传动连接,所述配重块设置在所述传动轴的中间位置。5.根据权利要求1所述的新型麻醉装置,其特征在于,所述平衡粗调装置包括电流源、电磁铁和永磁铁块。6.根据权利要求5所述的新型麻醉装置,其特征在于,所述电流源与所述电磁铁电连接。7.根据权利要求5所述的新型麻醉装置,其特征在于,所述永磁铁块与所述平衡粗调装置的内壁滑动摩擦连接,在非受力时保持稳定状态。
技术总结
本实用新型公开了一种新型麻醉装置,所述新型麻醉装置包括针头、针筒、平衡细调装置、平衡粗调装置、倾角传感器、把手、距离传感器、推杆和控制器,平衡细调装置通过电机控制配重块的具体位置,平衡粗调装置通过电磁铁控制永磁铁块的具体位置,平衡细调装置和平衡粗调装置相互配合可以调节新型麻醉装置在各个方向上的受力,倾角传感器、距离传感器和控制器相互配合,可以实现平衡操作的自行启动和智能控制,在保证麻醉装置的稳定性的同时简化控制操作,便于医护人员使用。便于医护人员使用。便于医护人员使用。
技术研发人员:孙文超 竺苗 徐亚庆 孔雄辉
受保护的技术使用者:宁波市第六医院
技术研发日:2021.03.22
技术公布日:2022/2/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1