一种高集成度感知结构
1.本实用新型涉及医疗器械技术领域,具体涉及一种高集成度感知结构。
背景技术:
2.现有的心脏彩超机械臂末端只设置探头。彩超机要获得探头的力数据,需要通过专门的力反馈系统,力反馈系统首先使用机械臂自身的力传感器获取探头在皮肤上的受力数据,力反馈系统内的受力数据还需要经过复杂的解算。因此,探头不能直接获得自身的受力情况,并且精准度存在误差。另外,常规的机械臂很少会配有用以实现精密操作的力反馈系统,因而在彩超机械臂的应用也相对受限。
3.综上,行业内急需研发一种直接获取探头的受力情况的末端感知结构。
技术实现要素:
4.本实用新型的目的是为了克服以上现有技术存在的不足,提供了一种直接获取探头的受力情况的高集成度感知结构。
5.本实用新型的目的通过以下的技术方案实现:
6.一种高集成度感知结构,包括:与机械臂固定的上部件和与检测探头连接的下部件,上部件和下部件活动对接;上部件包括圆板和中空的第一圆柱,圆板和第一圆柱的一端固定,弹簧穿过第一圆柱,第一圆柱外设置固定壳,固定壳的一端和圆板固定;下部件的一端设置第二圆柱,第二圆柱的直径小于第一圆柱的内径,第二圆柱的外围设置圆形凸起,圆形凸起的内径大于第二圆柱的外径,圆形凸起的外径大于或者等于弹簧的直径,下部件的中部设置凸起圈,固定壳的另一端可活动的卡接在凸起圈外;下部件的另一端设置摄像头;第一圆柱的中空内设置力传感器,力传感器的位置和第二圆柱的位置相对应。
7.优选地,固定壳包括:左壳和右壳;左壳和右壳的对应位置均设置锁孔,左壳和右壳通过锁孔锁住固定。
8.优选地,左壳和右壳的上部的形状和上部件的形状相适配,左壳和右壳的下部的形状和下部件的形状相适配。
9.优选地,下部件的另一端的侧边设置用于固定摄像头的凸起固定块。
10.优选地,下部件的另一端的另一侧面设置用于固定检测探头的凹槽。
11.本实用新型相对于现有技术具有如下优点:
12.本实用新型的高集成度感知结构作为彩超机机械臂的一个末端感知的机械结构,可集成安装力传感器、深度摄像头、超声探头,当探头接触待测物后,下部件被压,往上部件靠近,第二圆柱接触力传感器,并压迫力传感器,从而力传感器直接获得探头的压力数据,探头的压力不需要经过机械臂才被采集。因此,借助本实用新型的高集成度感知结构能直接获得探头的压力数据,且获得的压力数据精确度高,而且获得方式简便。此外,本实用新型的高集成度感知结构简单,易操作,能广泛应用。
13.本实用新型的高集成度感知结构当探头接触待测物时,下部件往上部件靠近的过
程,弹簧被压缩,弹簧一端接触压迫圆板,另一端压迫第二圆柱外围的圆形凸起,保证探头始终紧贴被测物体。当检测完毕,弹簧会推动下部件复位,排除机械机构对力传感器的干扰。
附图说明
14.构成本申请的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
15.图1为本实用新型的高集成度感知结构的结构图。
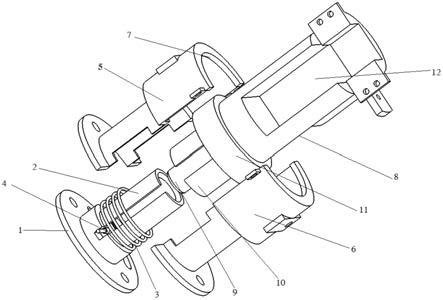
16.图2本实用新型的高集成度感知结构的第一爆炸立体图。
17.图3本实用新型的高集成度感知结构的一爆炸平面图。
18.图4本实用新型的高集成度感知结构的第二爆炸立体图。
具体实施方式
19.下面结合附图和实施例对本实用新型作进一步说明。
20.参见图1-4,高集成度感知结构,包括:与机械臂固定的上部件和与检测探头连接的下部件8,上部件和下部件8活动对接;上部件包括圆板1和中空的第一圆柱2,圆板1和第一圆柱2的一端固定,弹簧3穿过第一圆柱2,第一圆柱2外设置固定壳,固定壳的一端和圆板1固定;下部件8的一端设置第二圆柱9,第二圆柱9的直径小于第一圆柱2的内径,第二圆柱9的外围设置圆形凸起10,圆形凸起10的内径大于第二圆柱9的外径,圆形凸起10的外径大于或者等于弹簧3的直径,下部件8的中部设置凸起圈11,固定壳的另一端7可活动的卡接在凸起圈11外;下部件8的另一端设置摄像头;第一圆柱2的中空内设置力传感器4,力传感器4的位置和第二圆柱9的位置相对应。
21.在本实施例,固定壳包括:左壳5和右壳6;左壳5和右壳6的对应位置均设置锁孔14,左壳5和右壳6通过锁孔14锁住固定。
22.在本实施例,左壳5和右壳6的上部的形状和上部件的形状相适配,左壳5和右壳6的下部的形状和下部件8的形状相适配。
23.在本实施例,下部件8的另一端的侧边设置用于固定摄像头的凸起固定块13。更进一步地,摄像头为深度摄像头,用于采集图像信息与深度信息。
24.在本实施例,下部件8的另一端的另一侧面设置用于固定检测探头的凹槽12。
25.在本实施例,力传感器4精准的收集探头的受力情况,当探头接触待测物后,下部件8被压,往上部件靠近,第二圆柱9接触力传感器4,并压迫力传感器4,从而力传感器4获得压力数据。下部件8往上部件靠近的过程,弹簧3被压缩,弹簧3一端接触压迫圆板1,另一端压迫第二圆柱9外围的圆形凸起10。当检测完毕,弹簧3会推动下部件8复位。当探头没有接触待测物后,下部件8没有被压,弹簧3自然伸长。弹簧3的作用是排除弹簧3无压缩状态下下部件8对力传感器4的干扰,这种干扰指的是在没有人为压缩状态下力传感器4由于有被碰到依旧有数据产生,同时为了避免弹簧3压到力传感器4的信号线。
26.本实用新型为彩超机机械臂提供一个末端感知的机械结构,高集成度感知结构集成力传感器4、深度摄像头和探头,使末端采集面始终紧贴被测物体,能直接在机械臂末端
装有力传感器4,获取力反馈数据。
27.上述具体实施方式为本实用新型的优选实施例,并不能对本实用新型进行限定,其他的任何未背离本实用新型的技术方案而所做的改变或其它等效的置换方式,都包含在本实用新型的保护范围之内。
技术特征:
1.一种高集成度感知结构,其特征在于,包括:与机械臂固定的上部件和与检测探头连接的下部件,上部件和下部件活动对接;上部件包括圆板和中空的第一圆柱,圆板和第一圆柱的一端固定,弹簧穿过第一圆柱,第一圆柱外设置固定壳,固定壳的一端和圆板固定;下部件的一端设置第二圆柱,第二圆柱的直径小于第一圆柱的内径,第二圆柱的外围设置圆形凸起,圆形凸起的内径大于第二圆柱的外径,圆形凸起的外径大于或者等于弹簧的直径,下部件的中部设置凸起圈,固定壳的另一端可活动的卡接在凸起圈外;下部件的另一端设置摄像头;第一圆柱的中空内设置力传感器,力传感器的位置和第二圆柱的位置相对应。2.根据权利要求1所述的高集成度感知结构,其特征在于,固定壳包括:左壳和右壳;左壳和右壳的对应位置均设置锁孔,左壳和右壳通过锁孔锁住固定。3.根据权利要求2所述的高集成度感知结构,其特征在于,左壳和右壳的上部的形状和上部件的形状相适配,左壳和右壳的下部的形状和下部件的形状相适配。4.根据权利要求1所述的高集成度感知结构,其特征在于,下部件的另一端的侧边设置用于固定摄像头的凸起固定块。5.根据权利要求1所述的高集成度感知结构,其特征在于,下部件的另一端的另一侧面设置用于固定检测探头的凹槽。
技术总结
本实用新型公开了一种高集成度感知结构,包括:与机械臂固定的上部件和与检测探头连接的下部件,上部件和下部件活动对接;上部件包括圆板和中空的第一圆柱,圆板和第一圆柱的一端固定,弹簧穿过第一圆柱,第一圆柱外设置固定壳,固定壳的一端和圆板固定;下部件的一端设置第二圆柱,第二圆柱的直径小于第一圆柱的内径,第二圆柱的外围设置圆形凸起,下部件的中部设置凸起圈,固定壳的另一端可活动的卡接在凸起圈外;下部件的另一端设置摄像头;第一圆柱的中空内设置力传感器,力传感器的位置和第二圆柱的位置相对应。借助本实用新型的高集成度感知结构能直接获得探头的压力数据,且获得的压力数据精确度高,而且获得方式简便。而且获得方式简便。而且获得方式简便。
技术研发人员:张志成 李晓航 赖广源 庄恒锋 麦浩楠 雷茵 陈钰
受保护的技术使用者:广东轻工职业技术学院
技术研发日:2021.06.29
技术公布日:2022/2/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1