一种自动化微创手术工具的制作方法
1.本发明涉及于医疗器械的研究领域,具体涉及到一种在腔内使用的微创手术工具。
背景技术:
2.微创手术是指利用腹腔镜、胸腔镜或其它成像仪器等现代医疗器械及相关设备进行的手术。微创外科的出现及在医学领域的广泛应用已经十多年了。不同于开放手术,微创手术创伤小,疼痛感小、出血量小。只需利用患者的生理孔径(如肚脐眼、肛门、口腔/食道、鼻腔、尿道等),或按照需要在患者的患处附近开1到数个直径约0.5-1厘米的小孔,术后只需1-5 天便可完成检查、治疗、恢复等过程。相比开放手术,可以降低对人体的伤害,减少并发症,提高舒适性,并减少住院费用。
3.近年来出现的腔内手术机器人(如达芬奇)一般大致由控制台、床旁机械臂系统、成像系统三部分组成,虽然可以增加外科医生的视野,减少个体生理特性(如手部发抖、眼睛酸花等),增加器械的灵活度,但是由于其入剖开手术结构复杂,成本高昂,售价在数百万到数千万人民币;又有床旁机械臂系统体积大,占用手术操作空间大,只能布置1-4个机械臂;每个机械臂的操作组件只有一个功能,手术期间需要中断手术以便更换操作组件。手术机器人仍然需要在患者人体上打一个大孔,或多个小孔,不能有效减少对患者的创伤。
技术实现要素:
4.本发明旨在提供一种自动化微创手术工具,设计结构简单实用,体积小,可采用微型电动机驱动,可通过计算机程序控制操作,能够调整操作组件的手术操作与进退等功能,配置不同功能的操作组件有多种手术用途,便于器械消毒和维护与安装;可以通过一个生理孔径(或在手术患处附近开孔)布置多个微创手术工具在腔内,减少手术开孔数量,保持手术不间断地持续进行,提高手术效率,有利于患者快速恢复和节约住院费用。
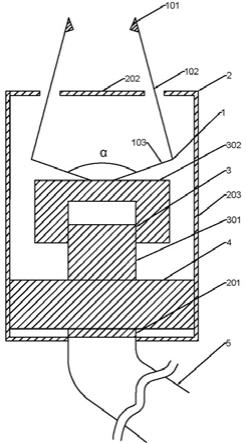
5.为达到上述目的,本发明提供一种自动化微创手术工具,包括操作组件、外壳组件、调控组件、驱动组件、跟踪组件;
6.所述操作组件包括后臂、前臂、操作器;所述调控组件包括传动器和挂靠器;所述操作组件的两个后臂之间形成夹角α;所述操作组件穿过外壳组件顶端的控制平台与调控组件的挂靠器活动连接;所述前臂的顶端配置有操作器,底端与后臂的顶端连接;所述后臂的底端与挂靠器的顶端可拆卸活动连接;所述传动器与挂靠器活动连接;所述挂靠器与外壳组件滑动连接;所述传动器与驱动组件连接;所述驱动组件的底端固定安装在外壳组件内的底座上;所述跟踪组件的顶端与驱动组件的底端可拆卸连接。
7.进一步地,所述操作组件的前臂穿过外壳组件顶端的控制平台连接后臂;所述后臂的底端与挂靠器顶端可拆卸活动连接,形成受外壳组件和挂靠器约束并以挂靠器顶端转动连接点为轴的结构;
8.进一步地,所述挂靠器和传动器活动连接,挂靠器可以在外壳组件内部前进和后
连接后臂(103);所述后臂(103)与螺母平台(302)顶端可拆卸活动连接,形成受外壳组件(2)和螺母平台(302)约束并以螺母平台(302)顶端转动连接点为轴的结构;
41.进一步地,所述螺母平台(302)和螺杆(301)活动连接,螺母平台(302)可以在外壳组件 (2)内部前进和后退。
42.初始具有多种型号的微创手术工具,不同型号的操作组件不同;手术医师应能根据术前规划选择多种不同型号的微创手术工具,并且为此设置好计算机执行程序。在手术过程中,外科医师可以通过调整跟踪组件(5)的可塑弯曲度,把控微创手术工具的位置,在超声波、x 光或者置于外壳组件(1)顶端的内窥镜等呈现图像的引导下,将微创手术工具通过开孔送入腔内指定位置。随后在自动化或计算机程序的控制下,单个微创手术工具通过驱动组件(4) 的动力带动螺纹调控组件(3),使螺母平台(302)在外壳组件内往复运动,带动调节操作组件(1)后臂(103)的张合程度,通过前臂(102)配置的操作器(101)执行手术动作。
43.多个微创手术工具应当根据术前外科医生制订的规划步骤,在计算机程序的控制下,相互协同配合以完成复杂的手术。如在手术中遇到意外情况,手术医师可以随时控制计算机程序,中止手术,及时调用专门的应急微创手术工具处理,或亲自干预并处理。
44.跟踪组件(5)的两头贯通,手术医师可以通过跟踪组件(5)内的管道来配置多种手术辅助工具对手术部位进行内窥镜、超声探查、充气、抽气、抽血、抽液、冲洗等手术操作。
45.手术完成后,外科医师可以再次利用跟踪组件(5)将微创手术工具通过患者手术开孔处依次取出;之后可以先从外壳组件(2)拆解下跟踪组件(5),再打开外壳组件(2)拆解下操作组件(1),以便清洗、消毒或其它疾控处理。
46.实施例2:
47.如图3所示,所述操作组件(1)包括后臂(103)、前臂(102)、操作器(101);所述齿轮调控组件(6)包括双齿轮(601)、齿条平台(602);所述操作组件(1)的两个后臂之间形成夹角α;所述操作组件(1)穿过外壳组件(2)顶端的控制平台(202)与齿轮调控组件(6) 的齿条平台(602)活动连接;所述前臂(102)的顶端与操作器(101)固定连接,底端与后臂(103)的顶端连接;所述后臂(103)的底端与齿条平台(602)的顶端可拆卸活动连接;所述双齿轮(601)与齿条平台(602)内外活动连接;所述齿条平台(602)与外壳组件(2) 活动连接;所述双齿轮(601)的底端与驱动组件(4)固定连接;所述驱动组件(4)的底端固定安装在外壳组件(2)内的底座(201)上;所述跟踪组件(5)的顶端与驱动组件(4)的底端可拆卸连接。
48.进一步地,所述操作组件(1)的前臂(102)穿过外壳组件(2)顶端的控制平台(202) 连接后臂(103);所述后臂(103)与齿条平台(602)顶端可拆卸活动连接,形成受外壳组件(2)和齿条平台(602)约束并以齿条平台(602)顶端转动连接点为轴的结构;
49.进一步地,所述齿条平台(602)和双齿轮(601)活动连接,齿条平台(602)可以在外壳组件(2)内部前进和后退。
50.外科医师操作过程与实施例1相同。
51.当然,本发明还可有其它多种实施案例。在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
技术特征:
1.一种自动化微创手术工具,其特征在于包括操作组件(1)、外壳组件(2)、调控组件、驱动组件(4)、跟踪组件(5);所述操作组件(1)包括操作器(101)、前臂(102)、后臂(103);所述外壳组件(2)包括底座(201)、控制平台(202)、壳体(203);所述调控组件包括传动器、挂靠器;所述操作组件(1)的两个后臂之间形成夹角α;所述操作组件(1)穿过外壳组件(2)顶端的控制平台(202)与调控组件的挂靠器可拆卸转动连接;所述前臂(102)的顶端配置有操作器(101),底端与后臂(103)的顶端连接,连接方式可依据手术需求而定;所述后臂(103)的底端与挂靠器的顶端可拆卸转动连接;所述挂靠器与外壳组件(2)滑动连接;所述传动器与挂靠器活动连接;所述传动器与驱动组件(4)连接;所述驱动组件(4)的底端固定安装在外壳组件(2)内的底座(201)上;所述跟踪组件(5)的顶端与驱动组件(4)的底端可拆卸连接。2.根据权利要求1所述的一种微创手术工具,其特征在于所述操作组件(1)的前臂(102)穿过外壳组件(2)顶端的控制平台(202)与后臂(103)固定连接;所述后臂(103)安装在挂靠器上,与挂靠器的顶端可拆卸转动连接,形成受外壳组件(2)和挂靠器约束并以挂靠器顶端转动连接点为轴的结构;所述挂靠器和传动器活动连接,可以在外壳组件(2)内部前进和后退;所述外壳组件(2)可纵向的分为两半,通过卡扣组装在一起;所述跟踪组件(5)的顶端与外壳组件(2)的底座(201)通过接口连接,跟踪组件(5)内部有空间可供导管和线缆与外壳组件(2)外端的导管和线缆一一对应密封连接。3.根据权利要求1所述的一种微创手术工具,其特征在于:所述操作组件(1)是单独一个设置在挂靠器外壁一侧,或两个对称地设置在挂靠器外壁两侧。4.根据权利要求1所述的一种微创手术工具,其特征在于:所述外壳组件(2)的壳体(203)外壁为钝棱多面体,每条边为倒圆或倒角结构;所述操作组件(1)为l形、u/v形、或z形。5.根据权利要求1所述的一种微创手术工具,其特征在于:所述操作组件(1)为弹性材料或发热导电材料或绝缘材料。6.根据权利要求2所述的一种微创手术工具,其特征在于:所述调控组件是螺纹调控组件(3),传动器是外螺纹的螺杆(301),挂靠器是内螺纹的螺母平台(302);螺母平台(302)在外壳组件(2)内部前进和后退。7.根据权利要求2所述的一种微创手术工具,其特征在于:所述调控组件是齿轮调控组件(6),传动器是双齿轮(601),挂靠器是齿条平台(602);齿条平台(602)在外壳组件(2)内部前进和后退。8.根据权利要求1所述的一种微创手术工具,其特征在于:所述跟踪组件(5)为有一定弯曲形变和适当硬度的中空管;跟踪组件(5)两端贯通,内部布置软管、电线、光纤、内窥镜、
超声波装置以实现多种辅助功能和操作。
技术总结
本发明公开一种自动化微创手术工具,包括操作组件、外壳组件、调控组件、驱动组件、跟踪组件。本发明设计的特点是结构简单,体积小,可通过计算机程序控制操作,能够调整微创手术工具之调控组件的进退,能够配置各种可拆卸的不同功能的操作组件,从而实现可以通过一个生理孔径(或手术患处附近开孔)在腔内布置多个微创手术工具,以达到减少手术开孔数量,并确保手术的连贯与持续进行,提高手术的准确性和效率,利于患者快速恢复等目的。利于患者快速恢复等目的。利于患者快速恢复等目的。
技术研发人员:魏珂
受保护的技术使用者:微智术科技(海南)有限公司
技术研发日:2021.08.20
技术公布日:2022/5/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1