用于避免牵开器干扰的系统和装置的制作方法
本技术整体涉及牵开器及其使用,并且更具体地涉及避免牵开器与外科装置之间的碰撞。
背景技术:
1、牵开器用于牵开外科部位处的患者组织,以产生供外科工具到达部位的畅通路径。牵开器可以在外科手术的一部分或整个过程中被定位并且被留在适当位置。手术计划可以包括外科器械包括沿其插入患者体内的轨迹。外科机器人可以用于一些外科手术中以辅助外科医生(包括,例如,通过沿着预定轨迹对准外科器械),或者在其他外科手术中以自主地执行外科手术。
技术实现思路
1、本公开的示例性方面包括:
2、根据本公开的至少一个实施方案的一种用于避免牵开器干扰的系统包括:至少一个牵开器,该至少一个牵开器具有基部和从基部延伸的一个或多个细长构件,该一个或多个细长构件是能够移动的;存储器,该存储器用于存储指令;处理器,该处理器执行存储在存储器中的指令,该指令使处理器:确定至少一个牵开器的位置;接收外科装置的轨迹;基于牵开器的位置和外科装置的轨迹,识别被定位成干扰装置沿着轨迹的移动的一个或多个细长构件中的至少一个细长构件。
3、本文的方面中的任一方面,其中执行存储在存储器中的指令还使处理器使至少一个细长构件从初始位置开始移动并远离轨迹移动。
4、本文的方面中的任一方面,还包括用于移动至少一个细长构件的至少一个马达。
5、本文的方面中的任一方面,其中执行存储在存储器中的指令还使处理器传输用于通知用户手动地移动至少一个细长构件的通知。
6、本文的方面中的任一方面,其中执行存储在存储器中的指令还使处理器接收对应于机器人的位置的机器人位置数据,该至少一个牵开器联接到机器人。
7、本文的方面中的任一方面,其中确定至少一个牵开器的位置是基于机器人位置数据。
8、本文的方面中的任一方面,其中执行存储在存储器中的指令还使处理器:接收描绘至少一个牵开器的至少一个图像,以及将至少一个牵开器配准到患者空间,其中确定至少一个牵开器的位置是基于配准。
9、本文的方面中的任一方面,其中执行存储在存储器中的指令还使处理器接收至少一个牵开器的三维(3d)模型,并且其中配准还基于3d模型。
10、本文的方面中的任一方面,其中至少一个牵开器包括能够由荧光镜检测的荧光镜标记。
11、本文的方面中的任一方面,其中执行存储在存储器中的指令还使处理器使至少一个细长构件返回到初始位置。
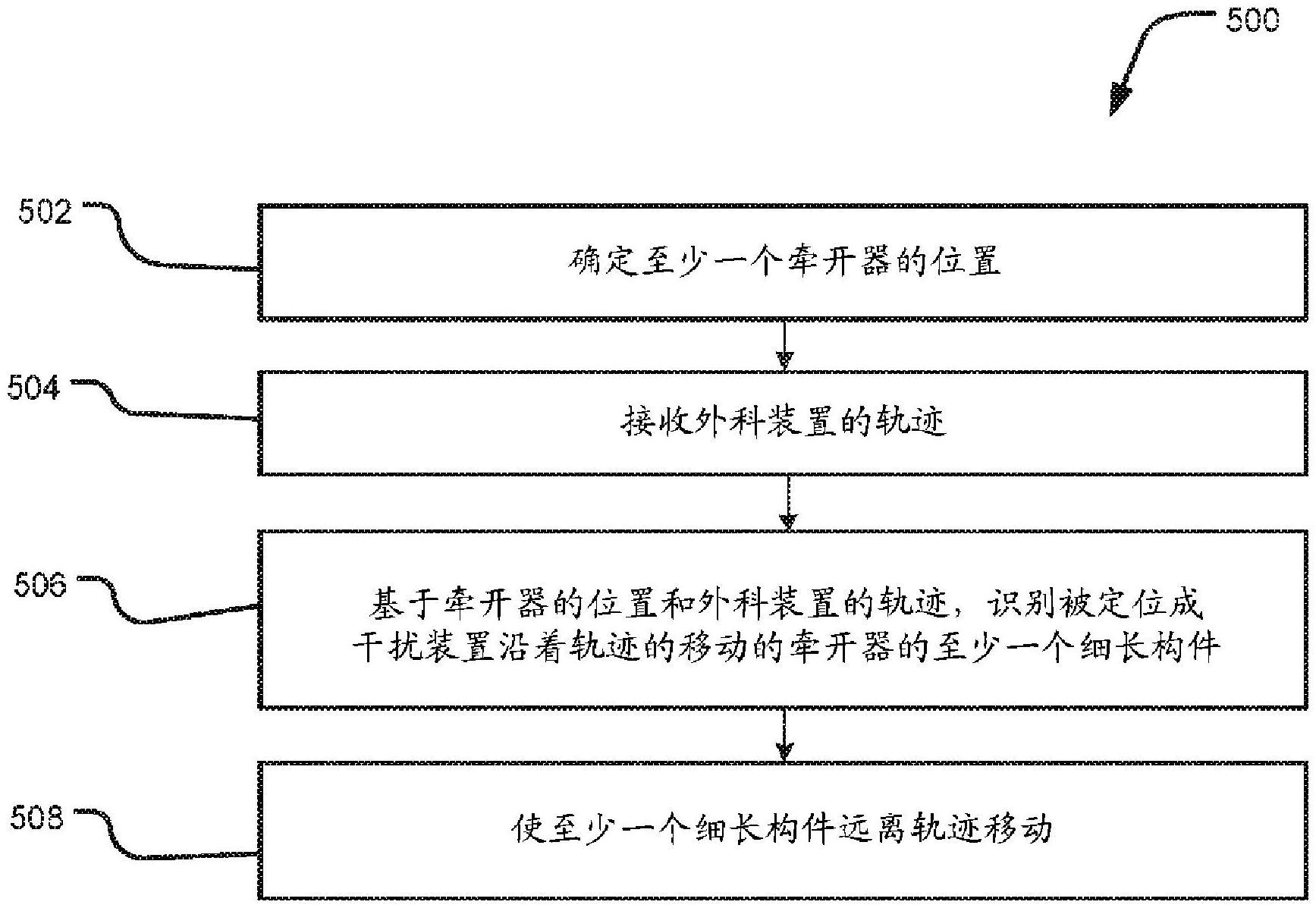
12、根据本公开的至少一个实施方案的一种用于避免牵开器干扰的方法包括:确定至少一个牵开器的位置,该至少一个牵开器具有基部和从基部延伸的一个或多个细长构件,该一个或多个细长构件是能够移动的;接收外科装置的轨迹;基于牵开器的位置和外科装置的轨迹,识别被定位成干扰装置沿着轨迹的移动的一个或多个细长构件中的至少一个细长构件;以及使至少一个细长构件从初始位置开始移动并远离轨迹移动。
13、本文的方面中的任一方面,其中确定至少一个牵开器的位置包括确定一个或多个细长构件中的每个细长构件的位置。
14、本文的方面中的任一方面,还包括接收对应于机器人的位置的机器人位置数据,该至少一个牵开器联接到机器人。
15、本文的方面中的任一方面,其中确定至少一个牵开器的位置是基于机器人位置数据。
16、本文的方面中的任一方面,还包括:接收描绘至少一个牵开器的至少一个图像,以及将至少一个牵开器配准到患者空间,其中确定至少一个牵开器的位置是基于配准。
17、本文的方面中的任一方面,还包括接收至少一个牵开器的三维(3d)模型,并且其中配准还基于3d模型。
18、本文的方面中的任一方面,还包括传输用于通知用户手动地移动至少一个细长构件的通知。
19、根据本公开的至少一个实施方案的一种外科牵开器包括:基部;多个细长构件,该多个细长构件从基部延伸并且被配置成接合患者的解剖结构;和马达,该马达被配置成在接收到第一信号时选择性地使多个细长构件中的至少一个细长构件朝向基部缩回,并且在接收到在第一信号之后接收到的第二信号时使多个细长构件中的至少一个细长构件从基部延伸。
20、本文的方面中的任一方面,其中至少一个牵开器包括能够由荧光镜检测的荧光镜标记。
21、本文的方面中的任一方面,其中多个细长构件中的每个细长构件能够独立于多个细长构件中的任何其他细长构件缩回和延伸。
22、本公开的一个或多个方面的细节在以下附图和描述中阐述。根据说明书和附图以及权利要求书,本公开中描述的技术的其他特征、目标和优点将是显而易见的。
23、短语“至少一个”、“一个或多个”以及“和/或”是在操作中具有连接性和分离性两者的开放式表述。举例来说,表述“a、b和c中的至少一个”、“a、b或c中的至少一个”、“a、b和c中的一个或多个”、“a、b或c中的一个或多个”以及“a、b和/或c”意指仅a、仅b、仅c、a和b一起、a和c一起、b和c一起,或a、b和c一起。当上述表述中的a、b和c中的每一个都指代如x、y和z的一个元素或如x1-xn、y1-ym和z1-zo的一类元素时,短语意指选自x、y和z的单个元素、选自同一类的元素(例如x1和x2)的组合以及选自两个或更多类的元素(例如y1和zo)的组合。
24、术语“一(a/an)”实体指所述实体中的一个或多个。如此,术语“一(a/an)”、“一个或多个”和“至少一个”在本文中可以可互换地使用。还应当注意,术语“包括(comprising/including)”、和“具有”可以可互换地使用。
25、前述内容是本公开的简化概述以提供对本公开的一些方面的理解。本
技术实现要素:
既不是对本公开和其各个方面、实施方案和配置的广泛性概述也不是详尽性概述。其既不旨在识别本公开的关键或重要要素,也不旨在描绘本公开的范围,而是以简化形式呈现本公开的所选概念,作为对下文呈现的更详细描述的介绍。如应了解,本公开的其他方面、实施方案和配置可能单独或以组合方式利用上文所阐述或下文所详细描述的特征中的一个或多个。
26、在考虑下文提供的实施方案描述之后,本发明的许多额外特征和优点对于本领域技术人员将变得显而易见。
技术特征:
1.一种用于避免牵开器干扰的系统,包括:
2.根据权利要求1所述的系统,其中执行存储在所述存储器中的所述指令还使所述处理器使所述至少一个细长构件从初始位置开始移动并远离所述轨迹移动。
3.根据权利要求2所述的系统,还包括用于移动所述至少一个细长构件的至少一个马达。
4.根据权利要求1所述的系统,其中执行存储在所述存储器中的所述指令还使所述处理器传输用于通知用户手动地移动所述至少一个细长构件的通知。
5.根据权利要求1所述的系统,其中执行存储在所述存储器中的所述指令还使所述处理器接收对应于机器人的位置的机器人位置数据,所述至少一个牵开器联接到所述机器人。
6.根据权利要求5所述的系统,其中确定所述至少一个牵开器的所述位置是基于所述机器人位置数据。
7.根据权利要求1所述的系统,其中执行存储在所述存储器中的所述指令还使所述处理器:
8.根据权利要求7所述的系统,其中执行存储在所述存储器中的所述指令还使所述处理器接收所述至少一个牵开器的三维(3d)模型,并且其中所述配准还基于所述3d模型。
9.根据权利要求1所述的系统,其中所述至少一个牵开器包括能够由荧光镜检测的荧光镜标记。
10.根据权利要求2所述的系统,其中执行存储在所述存储器中的所述指令还使所述处理器使所述至少一个细长构件返回到所述初始位置。
11.一种用于避免牵开器干扰的方法,包括:
12.根据权利要求11所述的方法,其中确定所述至少一个牵开器的所述位置包括确定所述一个或多个细长构件中的每个细长构件的位置。
13.根据权利要求11所述的方法,还包括接收对应于机器人的位置的机器人位置数据,所述至少一个牵开器被联接到所述机器人。
14.根据权利要求13所述的方法,其中确定所述至少一个牵开器的所述位置是基于所述机器人位置数据。
15.根据权利要求11所述的方法,还包括:
16.根据权利要求15所述的方法,还包括接收所述至少一个牵开器的三维(3d)模型,并且其中所述配准还基于所述3d模型。
17.根据权利要求11所述的方法,还包括传输用于通知用户手动地移动所述至少一个细长构件的通知。
18.一种外科牵开器,包括:
19.根据权利要求18所述的牵开器,其中所述至少一个牵开器包括能够由荧光镜检测的荧光镜标记。
20.根据权利要求18所述的牵开器,其中所述多个细长构件中的每个细长构件能够独立于所述多个细长构件中的任何其他细长构件缩回和延伸。
技术总结
本公开提供了用于避免牵开器干扰的系统和方法。至少一个牵开器包括基部和从基部延伸的一个或多个细长构件。该一个或多个细长构件是能够移动的。可以确定至少一个牵开器的位置并且可以接收外科装置的轨迹。可以基于牵开器的位置和外科装置的轨迹来识别被定位成干扰装置沿着轨迹的移动的一个或多个细长构件中的至少一个细长构件。
技术研发人员:S·阿苏莱,M·肖汉姆
受保护的技术使用者:马佐尔机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!