防抖的器械驱动组件以及机器人手术系统的制作方法
本发明实施例涉及机械领域,尤其涉及一种防抖的器械驱动组件以及机器人手术系统。
背景技术:
1、机器人手术系统是代替人手、由医生远程操控以进行手术的外科手术工具。机器人手术系统主要由支撑机械臂的控制台和具有末端执行器的手术器械组成。机械臂通常包括器械驱动组件,器械驱动组件用于向手术器械提供动力以使得末端执行器执行想要的动作。末端执行器可以是例如夹、钩等。
2、现有的器械驱动组件通常分为钢丝绳传动型和连杆传动型。钢丝绳传动型器械驱动组件的灵活度高,在有限的空间内可以实现较多的运动自由度。然而,钢丝绳传动型器械驱动组件具有刚度不够、容易发生蠕变等缺点。连杆传动型器械驱动组件刚好可以解决这些问题。
3、然而,现有的连杆传动型器械驱动组件在驱动手术器械动作时,手术器械容易发生抖动,手术精度低。
技术实现思路
1、本发明实施例提供一种防抖的器械驱动组件以及机器人手术系统其可有效降低手术过程中手术器械发生抖动的风险,提高手术精度。
2、本发明实施例提供一种器械驱动组件,所述器械驱动组件包括驱动单元、以及与所述驱动单元连接的连接单元,所述连接单元用于连接器械;所述驱动单元具有一第一中心轴线,并包括相对所述第一中心轴线对称的一个或多个主动机构,每一所述主动机构包括一主动旋转件;所述连接单元具有一第二中心轴线,并包括相对所述第二中心轴线对称的一个或多个从动机构,每一所述从动机构包括一平移件;所述第一中心轴线与所述第二中心轴线重合,且每一所述主动机构与一相应的所述从动机构连接并被配置为通过所述主动旋转件的旋转运动引起所述平移件的平移。通过将驱动单元和连接单元同轴连接,有助于降低由于离心力带来的器械发生抖动的风险,提高手术精度,从而有效解决了现有技术中手术器械容易发生抖动、手术精度低的问题。
3、在一种可行的方案中,所述驱动单元包括两个所述主动机构,所述连接单元包括两个所述从动机构。这种实施方案提供的器械驱动组件特别适合于驱动包括两个需要被推动和/或拉动的推杆的器械。
4、在一种可行的方案中,每一所述主动机构包括一电机、以及与所述电机的输出轴耦合的减速机构,所述主动旋转件与所述减速机构耦合,所述主动旋转件的中心轴线与所述第一中心轴线重合或平行。通过减速机构将电机的转速减速再传递至主动旋转件,更符合手术器械的运动需求。
5、在一种可行的方案中,所述减速机构包括与所述电机的输出轴耦合的带传动机构、以及与所述带传动机构耦合的减速箱,所述主动旋转件与所述减速箱的输出轴耦合。可以理解地,在其他实施例中,也可以采用其他减速机构布置。
6、在一种可行的方案中,每一所述从动机构还包括与一相应的所述主动旋转件连接并被配置为由所述主动旋转件驱动转动的从动旋转件,所述平移件与所述从动旋转件连接并被配置为通过所述从动旋转件的旋转运动引起所述平移件的平移。通过从动旋转件将主动旋转件的动力传递给平移件,传动更稳定,驱动单元和连接单元连接更方便。
7、在一种可行的方案中,所述从动旋转件的中心轴线与所述第二中心轴线重合或平行,所述平移件的平移方向与所述第二中心轴线重合或平行。这有助于进一步降低器械发生抖动的风险,提高手术精度。
8、在一种可行的方案中,所述从动旋转件包括圆柱区段,所述圆柱区段具有围绕所述从动旋转件的中心轴线延伸的螺旋槽,所述平移件包括套设于所述圆柱区段的推板、以及设于所述推板的凸起,所述凸起可滑动地容纳在所述螺旋槽内以通过所述从动旋转件的旋转引起所述平移件的平移。通过凸起与螺旋槽的配合将从动旋转件的扭矩转变为平移件的直线运动,传动稳定。可以理解地,在其他实施方案中,从动旋转件和平移件也可以采用其他结构/构造以将旋转运动转变为直线运动。
9、在一种可行的方案中,所述从动旋转件与所述主动旋转件可拆卸地连接,且所述主动旋转件被配置为最多旋转360°而与所述从动旋转件连接。这有助于实现自动连接主动旋转件和从动旋转件,安装方便。
10、在一种可行的方案中,所述驱动单元还包括用于支撑所述一个或多个主动机构的第一支撑组件,所述连接单元还包括用于支撑所述一个或多个从动机构的第二支撑组件,所述第一支撑组件与所述第二支撑组件可拆卸地连接。通过可拆卸连接第一支撑组件和第二支撑组件而连接驱动单元和连接单元,安装方便。
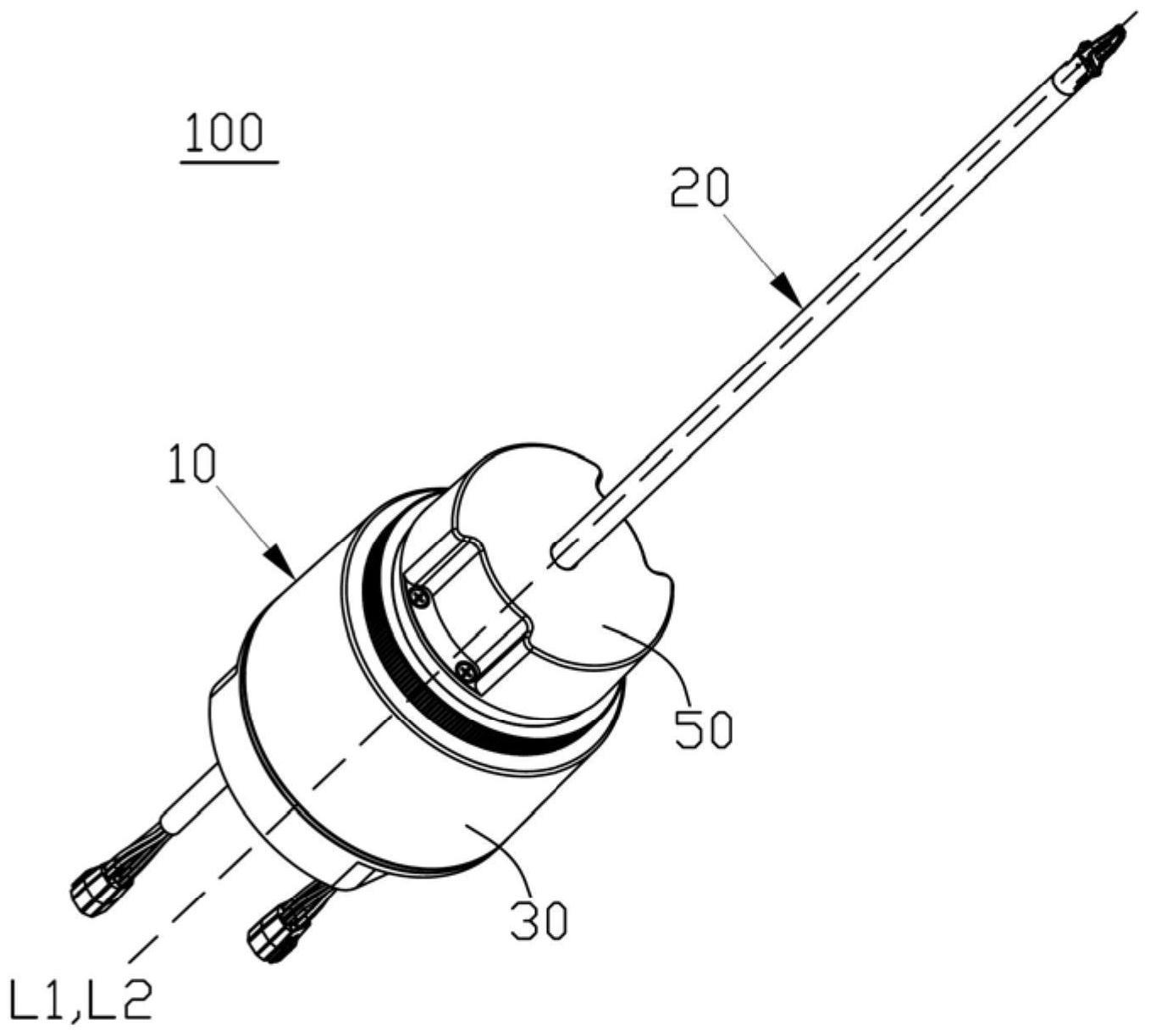
11、本发明实施例还提供一种机器人手术系统,所述机器人手术系统包括前述的器械驱动组件、以及与所述器械驱动组件的所述连接单元连接的手术器械。机器人手术系统所能实现的技术效果参照前面的器械驱动组件所能实现的技术效果,在此不再赘述。
12、基于上述方案可知,本发明通过驱动单元的主动机构的主动旋转件驱动连接单元的从动机构的从动旋转件转动,从而驱动连接单元的从动机构的平移件平移,进而驱动手术器械进行相应的动作,且由于驱动单元的第一中心轴线和连接单元的第二中心轴线重合,因此有助于防止由于驱动单元偏离连接单元而引起的离心力所导致的手术器械的抖动,提高手术精度。
技术特征:
1.一种防抖的器械驱动组件,其特征在于,所述器械驱动组件包括驱动单元、以及与所述驱动单元连接的连接单元,所述连接单元用于连接器械;所述驱动单元具有一第一中心轴线,并包括相对所述第一中心轴线对称的一个或多个主动机构,每一所述主动机构包括一主动旋转件;所述连接单元具有一第二中心轴线,并包括相对所述第二中心轴线对称的一个或多个从动机构,每一所述从动机构包括一平移件;所述第一中心轴线与所述第二中心轴线重合,且每一所述主动机构与一相应的所述从动机构连接并被配置为通过所述主动旋转件的旋转运动引起所述平移件的平移。
2.根据权利要求1所述的器械驱动组件,其特征在于,所述驱动单元包括两个所述主动机构,所述连接单元包括两个所述从动机构。
3.根据权利要求2所述的器械驱动组件,其特征在于,每一所述主动机构包括一电机、以及与所述电机的输出轴耦合的减速机构,所述主动旋转件与所述减速机构耦合,所述主动旋转件的中心轴线与所述第一中心轴线重合或平行。
4.根据权利要求3所述的器械驱动组件,其特征在于,所述减速机构包括与所述电机的输出轴耦合的带传动机构、以及与所述带传动机构耦合的减速箱,所述主动旋转件与所述减速箱的输出轴耦合。
5.根据权利要求2所述的器械驱动组件,其特征在于,每一所述从动机构还包括与一相应的所述主动旋转件连接并被配置为由所述主动旋转件驱动转动的从动旋转件,所述平移件与所述从动旋转件连接并被配置为通过所述从动旋转件的旋转运动引起所述平移件的平移。
6.根据权利要求5所述的器械驱动组件,其特征在于,所述从动旋转件的中心轴线与所述第二中心轴线重合或平行,所述平移件的平移方向与所述第二中心轴线重合或平行。
7.根据权利要求6所述的器械驱动组件,其特征在于,所述从动旋转件包括圆柱区段,所述圆柱区段具有围绕所述从动旋转件的中心轴线延伸的螺旋槽,所述平移件包括套设于所述圆柱区段的推板、以及设于所述推板的凸起,所述凸起可滑动地容纳在所述螺旋槽内以通过所述从动旋转件的旋转引起所述平移件的平移。
8.根据权利要求5所述的器械驱动组件,其特征在于,所述从动旋转件与所述主动旋转件可拆卸地连接,且所述主动旋转件被配置为最多旋转360°而与所述从动旋转件连接。
9.根据权利要求2所述的器械驱动组件,其特征在于,所述驱动单元还包括用于支撑所述一个或多个主动机构的第一支撑组件,所述连接单元还包括用于支撑所述一个或多个从动机构的第二支撑组件,所述第一支撑组件与所述第二支撑组件可拆卸地连接。
10.一种机器人手术系统,其特征在于,所述机器人手术系统包括根据权利要求1至9中任一项所述的器械驱动组件、以及与所述器械驱动组件的所述连接单元连接的手术器械。
技术总结
本发明实施例公开了一种防抖的器械驱动组件以及机器人手术系统。所述器械驱动组件包括驱动单元、以及与所述驱动单元连接的连接单元,所述连接单元用于连接器械;所述驱动单元具有一第一中心轴线,并包括相对所述第一中心轴线对称的一个或多个主动机构,每一所述主动机构包括一主动旋转件;所述连接单元具有一第二中心轴线,并包括相对所述第二中心轴线对称的一个或多个从动机构,每一所述从动机构包括一平移件;所述第一中心轴线与所述第二中心轴线重合,且每一所述主动机构与一相应的所述从动机构连接并被配置为通过所述主动旋转件的旋转运动引起所述平移件的平移。本发明的器械驱动组件以及机器人手术系统有助于降低手术器械发生抖动的风险。
技术研发人员:侯海山,潘鲁锋,张秀坤,徐鉷
受保护的技术使用者:诺创智能医疗科技(杭州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!