手术工具控制装置的制作方法
下面的实施例涉及手术工具控制装置。
背景技术:
1、就现有的经皮冠状动脉介入治疗(pci,percutaneous coronary intervention)而言,操作者会持续暴露在辐射风险中,并且还需要大量的时间和金钱来培养具有稳定手术水平的熟练医生,此外,手术质量会根据手术医生、地区、医院的不同产生巨大差距,难以普遍提供高质量的医疗服务。
2、为了弥补上述缺陷引入了介入治疗辅助机器人,但大多数辅助机器人仅能控制一种手术工具。现有的介入治疗辅助机器人只能用于难度较低的病变手术,很难用于慢性全闭塞(cto,chronic total occlusion)病变等需要多个手术工具的手术。
3、因此,需要一种能够单独控制多个手术工具和导管来适应复杂血管介入手术(complex pci)的手术工具控制装置。
4、上述背景技术是发明人在研发本发明的过程中掌握或习得的,不应被理解为必须是申请本发明前公开的已知技术。
技术实现思路
1、要解决的技术问题
2、一实施例的目的在于提供一种还可用于复杂血管介入手术的手术工具控制装置。
3、一实施例的目的在于提供一种可以单独控制多个手术工具及导管的手术工具控制装置。
4、解决问题的技术方案
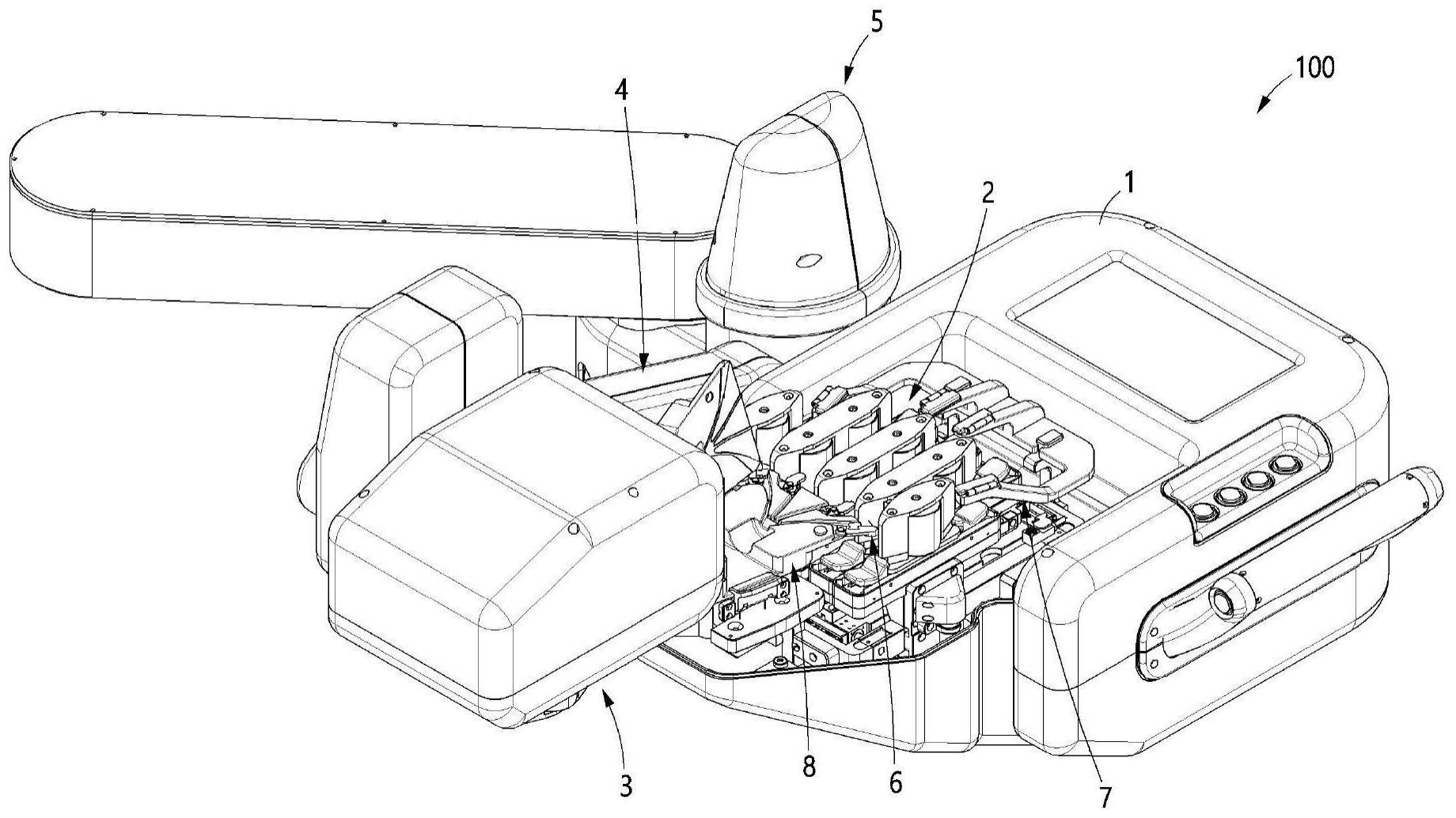
5、根据一实施例的手术工具控制装置包括:主外壳;手术工具控制组件,其设置于所述主外壳,用于控制至少一个手术工具;以及导管控制组件,其位于所述主外壳的前端,对引导所述至少一个手术工具的路径的导管进行控制,所述导管控制组件包括:框架,其位于所述主外壳的前端;以及第1滚轮模块及第2滚轮模块,其设置于所述框架,所述第2滚轮模块可向所述第1滚轮模块水平移动,从而在所述第1滚轮模块与第2滚轮模块之间握持所述导管。
6、所述第1滚轮模块及第2滚轮模块分别包括:滚轮板,其连接至所述框架;以及滚轮部件,其可旋转地配置于所述滚轮板。
7、在所述导管被握持的状态下,通过旋转所述第1滚轮模块及第2滚轮模块的所述滚轮部件来在长度方向上移动被握持的所述导管。
8、在所述导管被握持的状态下,通过垂直移动所述第1滚轮模块及第2滚轮模块中至少任一个的所述滚轮部件来旋转被握持的所述导管。
9、所述滚轮板包括:上滚轮板,其连接至所述框架;以及下滚轮板,其位于所述上滚轮板的下方,供所述滚轮部件以可旋转的方式连接,所述第1滚轮模块或第2滚轮模块还包括垂直移动部,其相对于所述上滚轮板垂直移动所述下滚轮板。
10、所述垂直移动部包括:垂直移动驱动电机;垂直移动滑轮,其从所述垂直移动驱动电机接收旋转动力;垂直移动丝杠螺母,其与所述垂直移动滑轮一体旋转;以及垂直移动丝杠,其与所述垂直移动丝杠螺母结合,并且一侧连接所述下滚轮板,从而随着所述垂直移动丝杠螺母的旋转来垂直移动所述下滚轮板。
11、所述第1滚轮模块或第2滚轮模块还包括旋转驱动部,其使所述滚轮部件相对于所述滚轮板旋转。
12、所述旋转驱动部包括:旋转驱动电机;旋转驱动滑轮,其从所述旋转驱动电机接收旋转动力;花键螺母,其与所述旋转驱动滑轮一体旋转;以及花键轴,其与所述花键螺母结合,并且一侧连接所述滚轮部件,从而随着所述花键螺母的旋转来旋转所述滚轮部件。
13、所述旋转驱动部还包括轴支撑部,其位于所述旋转驱动滑轮与花键轴之间,用于防止所述花键轴出现晃动。
14、所述导管控制组件还包括水平移动部,其水平移动所述第2滚轮模块。
15、所述水平移动部包括:水平移动驱动电机;水平移动丝杠,其水平连接至所述框架,从所述水平移动驱动电机接收旋转动力;以及水平移动丝杠螺母,其与所述水平移动丝杠结合,并且一侧连接所述滚轮板,从而随着所述水平移动丝杠的旋转来水平移动所述滚轮板。
16、还包括连接臂,其将所述导管控制组件连接至所述主外壳,所述导管控制组件通过所述连接臂相对于所述主外壳摆动或平移。
17、发明效果
18、根据一实施例的手术工具控制装置可以单独控制多个手术工具及导管。
19、根据一实施例的手术工具控制装置还可用于复杂的血管介入手术。
20、根据一实施例的手术工具控制装置的效果并不受限于上述效果,未言及的其他效果将通过下面的记载由本领域普通技术人员明确理解。
技术特征:
1.一种手术工具控制装置,其特征在于,
2.根据权利要求1所述的手术工具控制装置,其特征在于,
3.根据权利要求2所述的手术工具控制装置,其特征在于,
4.根据权利要求2所述的手术工具控制装置,其特征在于,
5.根据权利要求4所述的手术工具控制装置,其特征在于,
6.根据权利要求5所述的手术工具控制装置,其特征在于,
7.根据权利要求3所述的手术工具控制装置,其特征在于,
8.根据权利要求7所述的手术工具控制装置,其特征在于,
9.根据权利要求8所述的手术工具控制装置,其特征在于,
10.根据权利要求2所述的手术工具控制装置,其特征在于,
11.根据权利要求10所述的手术工具控制装置,其特征在于,
12.根据权利要求1所述的手术工具控制装置,其特征在于,
技术总结
根据一实施例的手术工具控制装置,包括:主外壳;手术工具控制组件,其设置于所述主外壳,用于控制至少一个手术工具;以及导管控制组件,其位于所述主外壳的前端,用于对引导所述至少一个手术工具的路径的导管进行控制,所述导管控制组件,包括:框架,其位于所述主外壳的前端;以及第1滚轮模块及第2滚轮模块,其设置于所述框架,所述第2滚轮模块可向所述第1滚轮模块水平移动,从而在所述第1滚轮模块与第2滚轮模块之间握持所述导管。
技术研发人员:崔载舜,金泳学,裴星汉,文永镇
受保护的技术使用者:财团法人峨山社会福祉财团
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!