内窥镜台车及医用机器人
本发明涉及内窥镜设备,尤其涉及一种内窥镜台车及医用机器人。
背景技术:
1、内窥镜是一种常用的医疗器械,它可以经口腔或其他天然腔道进入体内,对人体的胃、食管、十二指肠等组织、器官,进行病变的观察和手术治疗。由于内窥镜操作难度大,同时需要始终站立操作,且需多人配合,对操作者的体力和技巧都是很大的考验。特别是ercp手术时,医护还要穿十几公斤中的铅衣在射线下工作,对身体健康也产生了很大威胁。因此急需一种简单可靠,能大幅减轻医护身体负担、减少医护团队数量的内窥镜机器人出现。
2、专利cn112353496a公开了一种软式内窥镜操控机器人,其通过内窥镜主操作机器人和器械操作机器人相配合方式,实现了内窥镜的输送、弯曲、旋转的电控操作以及内窥镜器械的输送、弯曲的电控操作,增大了空间需求,而且还存在着无法切换并操纵多种内窥镜器械进行手术的问题,因此该内窥镜装置并未很好的降低医生在手术过程中的工作量,反而会因为频繁的拆装器械增加体力负担。
技术实现思路
1、本发明提供一种内窥镜台车及医用机器人,用以解决现有技术中内窥镜操作工作量大导致体力负担重的缺陷,且能提高手术操作的精准性和效率。
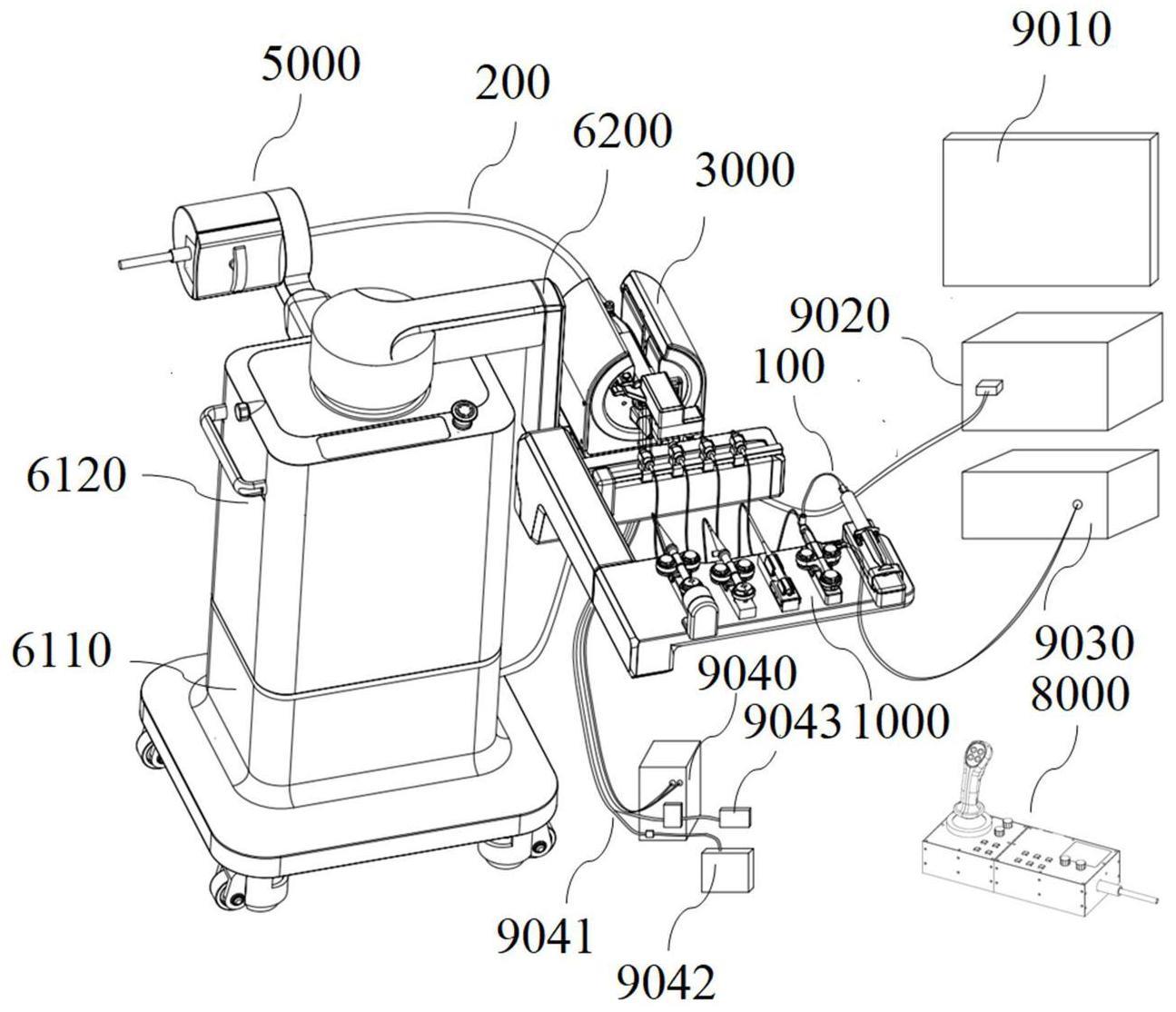
2、本发明提供一种内窥镜台车,包括台车主体、第一伸缩臂及第二伸缩臂,所述台车主体包括底座及工作台,所述工作台可升降地安装于所述底座,所述第一伸缩臂可转动安装于所述工作台,第二伸缩臂固定安装于工作台,所述第一伸缩臂和所述第二伸缩臂的长度均可调整;所述第一伸缩臂用于安装内窥镜驱动装置和内窥镜器械切换装置,所述第二伸出臂用于安装内窥镜输送装置。
3、本发明还提供一种医用机器人,包括内窥镜器械切换装置、内窥镜器械输送装置、内窥镜驱动装置、内窥镜输送装置及如上所述的内窥镜台车,所述内窥镜器械切换装置、所述内窥镜器械输送装置和所述内窥镜驱动装置均安装于所述第一伸缩臂,所述内窥镜输送装置安装于所述第二伸缩臂。
4、本发明提供的内窥镜台车及医用机器人,通过内窥镜器械切换装置、内窥镜器械输送装置、内窥镜驱动装置和内窥镜输送装置能实现内窥镜器械的切换输送及内窥镜的弯曲旋转和进退,操作功能丰富,能有效降低操作人员的体力消耗。
技术特征:
1.一种内窥镜台车,其特征在于,包括台车主体、第一伸缩臂及第二伸缩臂,所述台车主体包括底座及工作台,所述工作台可升降地安装于所述底座,所述第一伸缩臂可转动安装于所述工作台,第二伸缩臂固定安装于工作台,所述第一伸缩臂和所述第二伸缩臂的长度均可调整;所述第一伸缩臂用于安装内窥镜驱动装置和内窥镜器械切换装置,所述第二伸出臂用于安装内窥镜输送装置。
2.根据权利要求1所述的内窥镜台车,其特征在于,所述工作台的顶部设有支撑筒,所述第一伸缩臂固定安装于所述支撑筒,所述支撑筒内设置有旋转驱动,所述旋转驱动与所述支撑筒传动连接,所述支撑筒与所述工作台可转动连接。
3.根据权利要求2所述的内窥镜台车,其特征在于,所述第一伸缩臂包括第一固定臂、第一伸缩驱动和第一活动臂,所述第一固定臂和所述第一伸缩驱动均固定安装于所述支撑筒,所述第一活动臂插设在所述第一固定臂内并与所述第一伸缩驱动的驱动端相连。
4.根据权利要求1至3任一项所述的内窥镜台车,其特征在于,所述第一伸缩臂设有装夹插座。
5.一种医用机器人,其特征在于,包括内窥镜器械切换装置、内窥镜器械输送装置、内窥镜驱动装置、内窥镜输送装置及如权利要求1至4任一项所述的内窥镜台车,所述内窥镜器械切换装置、所述内窥镜器械输送装置和所述内窥镜驱动装置均安装于所述第一伸缩臂,所述内窥镜输送装置安装于所述第二伸缩臂。
6.根据权利要求5所述的医用机器人,其特征在于,所述内窥镜器械切换装置包括移动组件及安装于移动组件的多个管路夹持单元,所述内窥镜器械输送装置包括第一壳体及设置在第一壳体上的第一导向管,所述第一导向管的端部设有与所述管路夹持单元适配的凹面。
7.根据权利要求6所述的医用机器人,其特征在于,所述内窥镜器械切换装置包括器械装夹机构、器械切换机构及管路夹持机构,所述器械装夹机构包括安装台及设置在所述安装台上的多个器械装夹单元,所述器械切换机构包括器械支撑座,所述管路夹持机构包括安装杆及设置在所述安装杆上的多个管路夹持单元;
8.根据权利要求7所述的医用机器人,其特征在于,所述管路夹持单元包括外壳、夹头及弹性复位件,所述夹头可活动插设于所述外壳,所述夹头内设有用于供内窥镜器械的管路通过的中心通孔,所述弹性复位件套设于所述夹头并位于所述外壳内,所述夹头的一端设有用于与所述内窥镜输送装置对接的对接头,所述夹头的另一端设有卡爪,所述外壳设有口径从外向内逐渐减小的锥形口,在自然状态下,所述卡爪卡装于所述锥形口;在输送状态下,所述对接头与内窥镜器械输送装置的对接口抵接,所述卡爪移动至所述锥形口的大口端。
9.根据权利要求5所述的医用机器人,其特征在于,所述内窥镜驱动装置包括支撑座、旋转舱、旋转驱动机构和弯曲驱动机构;
10.根据权利要求9所述的医用机器人,其特征在于,所述第一支撑座上设有内齿圈,所述驱动机构包括旋转壳体、旋转驱动组件及输送驱动组件,所述旋转壳体可转动安装于所述支撑座,所述旋转驱动组件和所述输送驱动组件均安装在所述旋转壳体内,所述输送机构可拆卸安装在所述旋转壳体的侧面,所述输送驱动组件的输出端伸出至所述旋转壳体外与所述输送机构相连,所述旋转驱动组件包括旋转驱动单元及旋转齿轮,所述旋转齿轮套接于所述旋转驱动单元的输出轴并与所述内齿圈啮合。
技术总结
本发明提供一种内窥镜台车及医用机器人,内窥镜台车包括台车主体、第一伸缩臂及第二伸缩臂,所述台车主体包括底座及工作台,所述工作台可升降地安装于所述底座,所述第一伸缩臂可转动安装于所述工作台,第二伸缩臂固定安装于工作台,所述第一伸缩臂和所述第二伸缩臂的长度均可调整;所述第一伸缩臂用于安装内窥镜驱动装置和内窥镜器械切换装置,所述第二伸出臂用于安装内窥镜输送装置。本发明提供的内窥镜台车,通过内窥镜器械切换装置、内窥镜器械输送装置、内窥镜驱动装置和内窥镜输送装置能实现内窥镜器械的切换输送及内窥镜的弯曲旋转和进退,操作功能丰富,能有效降低操作人员的体力消耗。
技术研发人员:付野,谢天宇,刘炳义,卢海洋,杨春,仇宗澍,张继承
受保护的技术使用者:北京大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!