力检测装置、助力系统以及手术机器人的制作方法
本发明涉及手术机器人,特别是涉及一种力检测装置、助力系统以及手术机器人。
背景技术:
1、手术机器人的整机重量大,一般集中在300—1000kg。在进行手术前,通常需要将手术机器人移动至手术区域,手术完成后,再移动回指定区域放置。单纯依靠人力需要施加100—300n的力才能勉强推动手术机器人整机设备,这给医护人员造成了很大困扰。
2、传统的做法是:在手术机器人的把手上增加电动助力系统,通过检测安装在把手上的力传感器来精确测量施加在把手上的力的大小和方向,推断出使用者的意图,从而控制安装于手术机器人的底盘上的电机来驱动整机设备进行移动。其中力传感器包括弹性构件和粘贴在弹性构件表面上的应变片,当弹性构件受力时产生形变,应变片的电阻值变化,通过测量应变片的电压(mv级)即能够获得力的信号大小和方向。
3、在实际使用过程中,力传感器有时会遇到超载、冲击等情况,造成传感器塑性变形,影响测量精度,严重时,还会导致力传感器损坏,无法正常使用。
技术实现思路
1、基于此,有必要针对超载、冲击等情况引起的力传感器测量精度差、甚至损坏的问题,提出一种力检测装置、助力系统以及手术机器人。
2、一种力检测装置,包括:
3、第一组件和第二组件,所述第一组件和第二组件中的其中一者与手术机器人固定,且所述第二组件与所述第一组件能够沿第一方向相对移动;
4、检测机构,根据所述第一组件和所述第二组件的相对移动来检测力的大小和方向;
5、限位结构,设置在所述第一组件和/或所述第二组件上,用于限定所述第二组件相对所述第一组件在预设范围内移动。
6、在其中一个实施例中,所述检测机构包括沿第一方向在所述第一组件和所述第二组件两端设置的相互配合工作的信号源和信号接收器。
7、在其中一个实施例中,所述信号源为磁体,所述信号接收器为霍尔元件;
8、或者,所述信号源为光电发射器,所述信号接收器为光电接收器。
9、在其中一个实施例中,所述力检测装置包括弹性件,所述弹性件沿第一方向的一端与所述第二组件相连接。
10、在其中一个实施例中,所述弹性件沿第一方向的另一端与所述第一组件相连接。
11、在其中一个实施例中,所述限位结构与所述检测机构对应设置;
12、所述限位结构包括相互配合的第一止挡件和第二止挡件,所述第一止挡件设置在所述第一组件上,所述第二止挡件设置在所述第二组件上;
13、所述第一止挡件设置在所述第二止挡件靠近所述第一组件的端部的一侧。
14、在其中一个实施例中,所述限位结构还包括弹性件,所述弹性件套设在所述第二组件上,且一端与所述第一组件的内端壁抵接,另一端与所述第二止挡件抵接,使得所述第二组件与所述第一组件通过所述弹性件可移动地连接。
15、一种助力系统,用于安装在手术机器人上,所述助力系统包括助力部和上述力检测装置,所述助力部用于根据所述检测机构检测到的力的大小和方向驱动手术机器人移动。
16、一种手术机器人,包括上述助力系统和把手,所述力检测装置设置在所述把手上。
17、在其中一个实施例中,所述把手的两端分别设置有所述力检测装置,所述把手的两端分别与对应的所述力检测装置的第二组件连接。
18、上述力检测装置、助力系统以及手术机器人,通过设置第一组件、第二组件、检测机构以及限位结构,第一组件与第二组件能够相对移动,且检测机构能够根据第二组件与第一组件之间的移动距离以及方向,进而判断力的大小和方向。限位结构用于限制第二组件相对第一组件在预设范围内移动,即限位结构能够限制第二组件与第一组件之间的相对距离,以防止由于第二组件与第一组件之间发生超载、冲击等导致的第二组件与第一组件发生碰撞、挤压等情况,造成的检测机构损坏或者精度不准的问题。
技术特征:
1.一种力检测装置,其特征在于,包括:
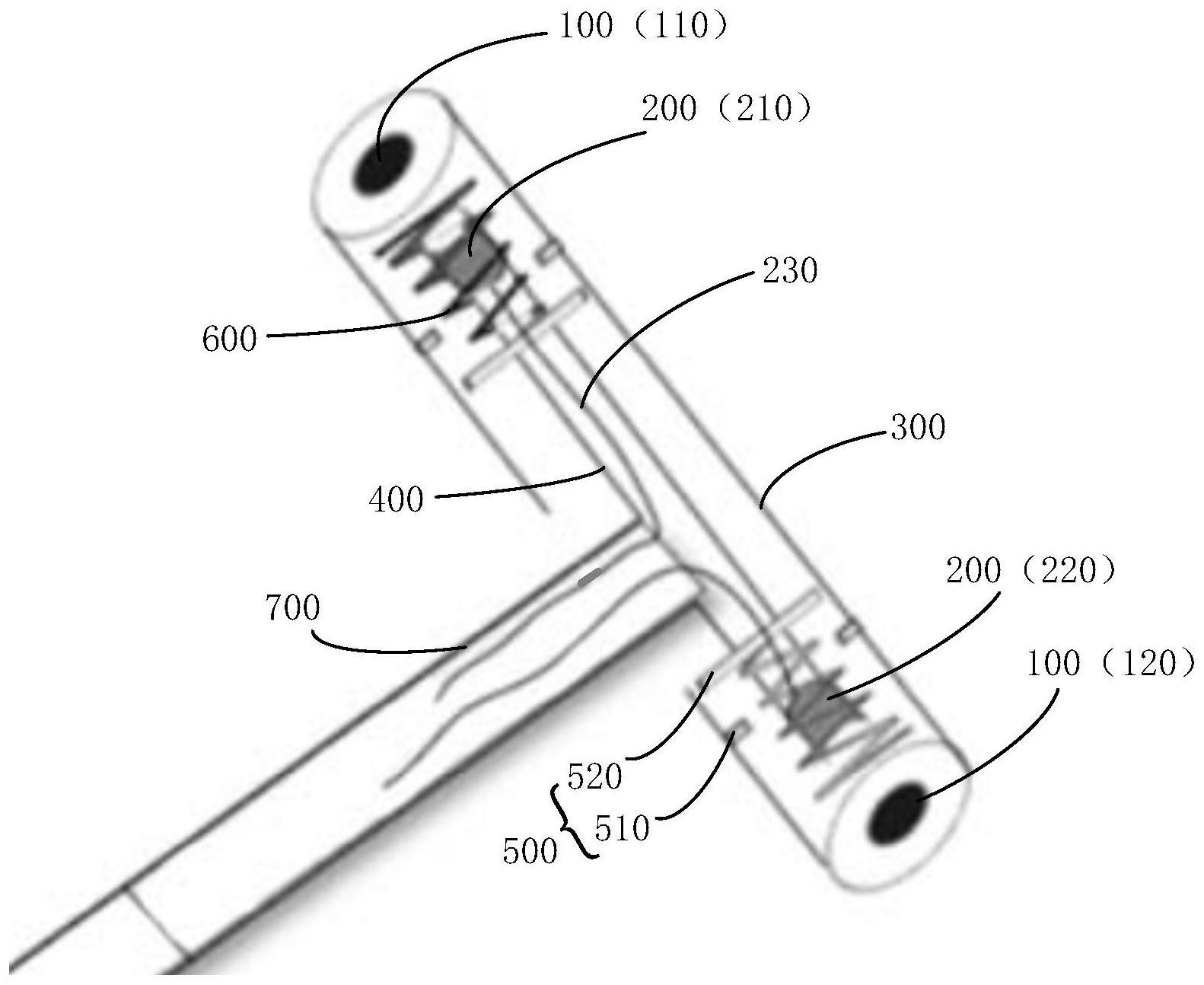
2.根据权利要求1所述的力检测装置,其特征在于,所述检测机构包括沿第一方向在所述第一组件(300)和所述第二组件(400)两端设置的相互配合工作的信号源(100)和信号接收器(200)。
3.根据权利要求2所述的力检测装置,其特征在于,所述信号源(100)为磁体,所述信号接收器(200)为霍尔元件;
4.根据权利要求1所述的力检测装置,其特征在于,所述力检测装置包括弹性件(600),所述弹性件(600)沿第一方向的一端与所述第二组件(400)相连接。
5.根据权利要求4所述的力检测装置,其特征在于,所述弹性件(600)沿第一方向的另一端与所述第一组件(300)相连接。
6.根据权利要求1所述的力检测装置,其特征在于,
7.根据权利要求6所述的力检测装置,其特征在于,所述限位结构(500)还包括弹性件(600),所述弹性件(600)套设在所述第二组件(400)上,且一端与所述第一组件(300)的内端壁抵接,另一端与所述第二止挡件(520)抵接。
8.一种助力系统,其特征在于,用于安装在手术机器人上,所述助力系统包括助力部和权利要求1-7任意一项所述的力检测装置,所述助力部用于根据所述检测机构检测到的力的大小和方向驱动手术机器人移动。
9.一种手术机器人,其特征在于,包括权利要求8所述助力系统和把手(700),所述力检测装置设置在所述把手(700)上。
10.根据权利要求9所述的手术机器人,其特征在于,所述把手(700)的两端分别设置有所述力检测装置,所述把手(700)的两端分别与对应的所述力检测装置的第二组件(400)连接。
技术总结
本发明涉及力检测装置、助力系统以及手术机器人,力检测装置包括第一组件、第二组件、检测机构以及限位结构。第一组件和第二组件中的其中一者固定于手术机器人,第二组件与所述第一组件能够沿第一方向相对移动,检测机构能够根据第二组件与第一组件之间的移动距离以及方向,进而判断力的大小和方向。限位结构用于限制第二组件相对第一组件在预设范围内移动,即限位结构能够限制第二组件与第一组件之间的相对距离,以防止由于第二组件与第一组件之间发生超载、冲击等导致的第二组件与第一组件发生碰撞、挤压等情况,造成的检测机构损坏或者精度不准的问题。
技术研发人员:杨旭东,程奇
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!