一种接骨手术机器人的制作方法
1.本发明涉及一种医疗设备,具体说是一种接骨手术机器人。
背景技术:
2.在骨科治疗中,通常需要在手部进行操作检测、清洁、手术等,现有大都直接将手部放置在类似枕垫结构上,无法对手部进行稳定、有效的夹持定位,对操作检测、治疗造成影响。
技术实现要素:
3.本发明提供了一种能自动、稳定夹装病患手臂以及手部,针对其完成有效骨折治疗操作的接骨手术机器人。
4.本发明采用的技术方案是:一种接骨手术机器人,其特征在于:包括工作台,工作台上分别对称设置左、右伸缩滑台,左、右伸缩滑台上滑动导向架设左、右升降滑台,左、右升降滑台上分别升降滑动设置左、右伸缩缸,左、右伸缩缸外接出左、右拉手,工作台上后部还支撑有位于左、右伸缩滑台之间的中间升降机构,中间升降机构朝前可升降连接手臂旋转电机,手臂旋转电机朝前连接手臂夹手装置。
5.所述手臂夹手装置包括两只斜向对称的夹持座,夹持座包括两座体和三位五通阀,两座体分别竖向、横向设置且折角处相连,座体包括中间座板、内气腔体、外气腔体、活塞杆、球形顶帽,内气腔体、外气腔体分别设置在中间座板两侧,中间座板上阵列均布多个活塞孔,活塞杆一端经活塞密封穿接在活塞孔内,活塞杆的另一端密封穿过内气腔体外接球形顶帽,内、外气腔上分别设置内气孔和外气孔,三位五通阀的供气口外接供气,三位五通阀的两进气口分别接两座体的两外气孔,三位五通阀的两出气口分别接两座体的两内气孔。
6.所述球形顶帽为pe塑料。
7.所述内、外气孔孔口设置调速阀。
8.所述活塞杆的另一端经密封盖板和/或垫圈密封穿过内气腔体。
9.所述密封盖板和/或垫圈设置在内气腔体内壁。
10.所述夹持座的两座体垂直设置。
11.所述活塞杆一端穿接活塞并经端部沉头螺钉锁紧连接。
12.所述左、右拉手为开口朝内、垂直于左、右伸缩滑台方向的卡口结构。
13.所述工作台底部设置可调定位万向轮。
14.在人体手部骨折需要夹持治疗时,左、右拉手在左右伸缩滑台和左右升降滑台上调至上下、左右移动,对准中间升降机构,将手部由左、右拉手朝向中间的手臂夹手装置伸出,手臂在左右拉手的卡口结构内卡接定位,手臂夹手夹装经中间升降机构升降带动并在手臂旋转电机带动下调整到位对准手部,手部伸入到两夹持座之间,每个夹持座的三位五通阀供气口外接供气,由两进气口对垂直的两座体外气腔体两外气孔调速阀调速供气,推
动中间座板上的活塞杆朝内气腔体方向外伸,活塞杆外端顶帽由原本贴近内腔体外侧推动外移,夹持座横竖方向对手部相对夹持座方向的夹紧,从而实现两夹持座对手部上下左右方向的夹持;并在需要松开时,切换三位五通阀,座体的内气腔体进气,推动活塞杆在活塞孔内朝外移动,活塞杆外端顶帽松开对手部夹持,夹持操作便捷,夹持稳定;活塞杆限位在活塞孔内不脱出,活塞杆杆部经带垫圈的密封盖板穿出内腔体,有效确保密封性和气缸结构运行稳定。
附图说明
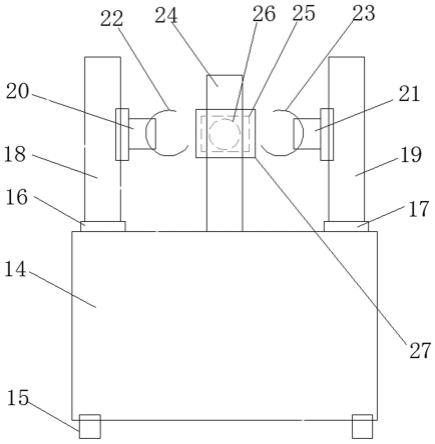
15.图1为本发明结构示意图;图2为本发明手臂夹手装置结构示意图;图3为本发明夹持座内部结构示意图。
16.图中:夹持座1、座体2、三位五通阀3、调速阀4、中间座板5、内气腔体6、外气腔体7、活塞孔8、活塞杆9、活塞10、内气孔11、外气孔12、pe球形顶帽13,工作台14、可调定位万向轮15、左伸缩滑台16、右伸缩滑台17、左升降滑台18、右伸缩滑台19、左伸缩缸20、右伸缩缸21、左拉手22、右拉手23、中间升降柱24、中间升降座25、手臂旋转电机26、手臂夹手装置27。
具体实施方式
17.以下结合附图和实施例作进一步说明。
18.图1所示一种接骨手术机器人包括工作台14、可调定位万向轮15、左伸缩滑台16、右伸缩滑台17、左升降滑台18、右伸缩滑台19、左伸缩缸20、右伸缩缸21、左拉手22、右拉手23、中间升降柱24、中间升降座25、手臂旋转电机26。
19.工作台14底部设置可调定位万向轮15,工作台14上分别对称设置左、右伸缩滑台16、17,左、右伸缩滑台上滑动导向架设左、右升降滑台18、19,升降滑台在其对应的伸缩滑台上前后纵深滑动进给,左、右升降滑台上分别升降滑动设置左、右伸缩缸20、21,左、右伸缩缸外接出左、右拉手22、23,工作台上后部还支撑有位于左、右伸缩滑台之间的中间升降柱24,中间升降柱24上可调升降定位设置中间升降座25、中间升降座25上朝前可升降连接手臂旋转电机26,手臂旋转电机朝前连接手臂夹手装置27。
20.图2、3所示的手臂夹手装置27包括两只斜向对称的夹持座1,夹持座1包括两座体2和三位五通阀3,两座体2分别竖向、横向垂直设置且相连,座体包括中间座板5、内气腔体6、外气腔体7,内气腔体、外气腔体分别设置在中间座板两侧,内气腔体6、外气腔体7上分别设置内、外气孔11、12,内、外气孔上分别接三位五通阀3的出气口和进气口,三位五通阀3的供气口外接供气。
21.图2所示:中间座板5上阵列均布多个活塞孔8,活塞杆9一端经活塞10密封穿接在活塞孔内,活塞杆9的另一端密封穿过内气腔体6外接球形pe顶帽13,内、外气腔上内气孔和外气孔分别接三位五通阀的出气口和进气口,由三位五通阀切换出气口、进气口的进气和出气,实现内、外气腔体切换朝内外推动活塞杆。
22.在本实施例中,三位五通阀为常规结构,本申请中部作详述。
23.在本实施例中,活塞杆一端穿接活塞并经端部沉头螺钉锁紧连接,以及活塞杆上设置密封圈,均是气缸密封技术的常规手段。
24.在本实施例的基础上,可在活塞杆的另一端穿接带垫圈的密封盖板用于压接内气腔体内壁,确保活塞杆的密封穿接。同时对于活塞杆伸缩限位,可采用活塞孔上限位,也可采用朝向内气腔体经密封盖板限位。
技术特征:
1.一种接骨手术机器人,其特征在于:包括工作台,工作台上分别对称设置左、右伸缩滑台,左、右伸缩滑台上滑动导向架设左、右升降滑台,左、右升降滑台上分别升降滑动设置左、右伸缩缸,左、右伸缩缸外接出左、右拉手,工作台上后部还支撑有位于左、右伸缩滑台之间的中间升降机构,中间升降机构朝前可升降连接手臂旋转电机,手臂旋转电机朝前连接手臂夹手装置。2.根据权利要求1所述的一种接骨手术机器人,其特征是:所述手臂夹手装置包括两只斜向对称的夹持座,夹持座包括两座体和三位五通阀,两座体分别竖向、横向设置且折角处相连,座体包括中间座板、内气腔体、外气腔体、活塞杆、球形顶帽,内气腔体、外气腔体分别设置在中间座板两侧,中间座板上阵列均布多个活塞孔,活塞杆一端经活塞密封穿接在活塞孔内,活塞杆的另一端密封穿过内气腔体外接球形顶帽,内、外气腔上分别设置内气孔和外气孔,三位五通阀的供气口外接供气,三位五通阀的两进气口分别接两座体的两外气孔,三位五通阀的两出气口分别接两座体的两内气孔。3.根据权利要求1所述的一种接骨手术机器人,其特征是:所述球形顶帽为pe塑料。4.根据权利要求1所述的一种接骨手术机器人,其特征是:所述内、外气孔孔口设置调速阀。5.根据权利要求1所述的一种接骨手术机器人,其特征是:所述活塞杆的另一端经密封盖板和/或垫圈密封穿过内气腔体。6.根据权利要求1所述的一种接骨手术机器人,其特征是:所述密封盖板和/或垫圈设置在内气腔体内壁。7.根据权利要求1所述的一种接骨手术机器人,其特征是:所述夹持座的两座体垂直设置。8.根据权利要求1所述的一种接骨手术机器人,其特征是:所述活塞杆一端穿接活塞并经端部沉头螺钉锁紧连接。9.根据权利要求1所述的一种接骨手术机器人,其特征是:所述左、右拉手为开口朝内、垂直于左、右伸缩滑台方向的卡口结构。10.根据权利要求1所述的一种接骨手术机器人,其特征是:所述工作台底部设置可调定位万向轮。
技术总结
本发明涉及一种接骨手术机器人,工作台上分别对称设置左、右伸缩滑台,左、右伸缩滑台上滑动导向架设左、右升降滑台,左、右升降滑台上分别升降滑动设置左、右伸缩缸,左、右伸缩缸外接出左、右拉手,工作台上后部还支撑有位于左、右伸缩滑台之间的中间升降机构,中间升降机构朝前可升降连接手臂旋转电机,手臂旋转电机朝前连接手臂夹手装置。其能自动、稳定夹装病患手臂以及手部,针对其完成有效骨折治疗操作。针对其完成有效骨折治疗操作。针对其完成有效骨折治疗操作。
技术研发人员:成永忠
受保护的技术使用者:成永忠
技术研发日:2022.04.27
技术公布日:2022/9/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1