一种穿刺设备末端、穿刺系统及其控制方法与流程
本说明书涉及医疗器械,尤其涉及一种穿刺设备末端、穿刺系统及其控制方法。
背景技术:
1、不可逆电穿孔术式作为治疗肿瘤的一种手段,是通过将两根以上的带有电极的穿刺针按一定规律放置在肿瘤周围,通过电场杀死肿瘤细胞的方式。对比于手术治疗、放射治疗和化学药物治疗等传统疗法,具有对患者的生理及心理创伤小、毒副作用小、无并发症、无后遗症等优点。同时,与射频、微波、冷冻、超声聚焦等基于热消融原理的物理疗法不同,不可逆电穿孔术式是对肿瘤细胞的破坏是基于非热生物医学效应,能够避免血管、淋巴等循环系统的“热沉效应”,并能够消融热敏器官附近的肿瘤组织,打破了热疗法(例如,射频消融、微波消融、冷冻消融等)治疗肿瘤的局限性。
2、在该术式手术过程中,至少需要两根电极针布置在肿瘤附近形成电场从而杀死肿瘤。并且,该术式手术对于布针的要求极为严苛。由于严苛的布针要求,使得该术式的人工操作难度极大,即使该术式已有相应的临床疗效证明,也依然难以大规模推广,并且临床疗效的稳定性也难以保证。
3、因此,有必要提供一种穿刺设备末端、穿刺系统及控制方法,以满足该术式的自动化布针需求。
技术实现思路
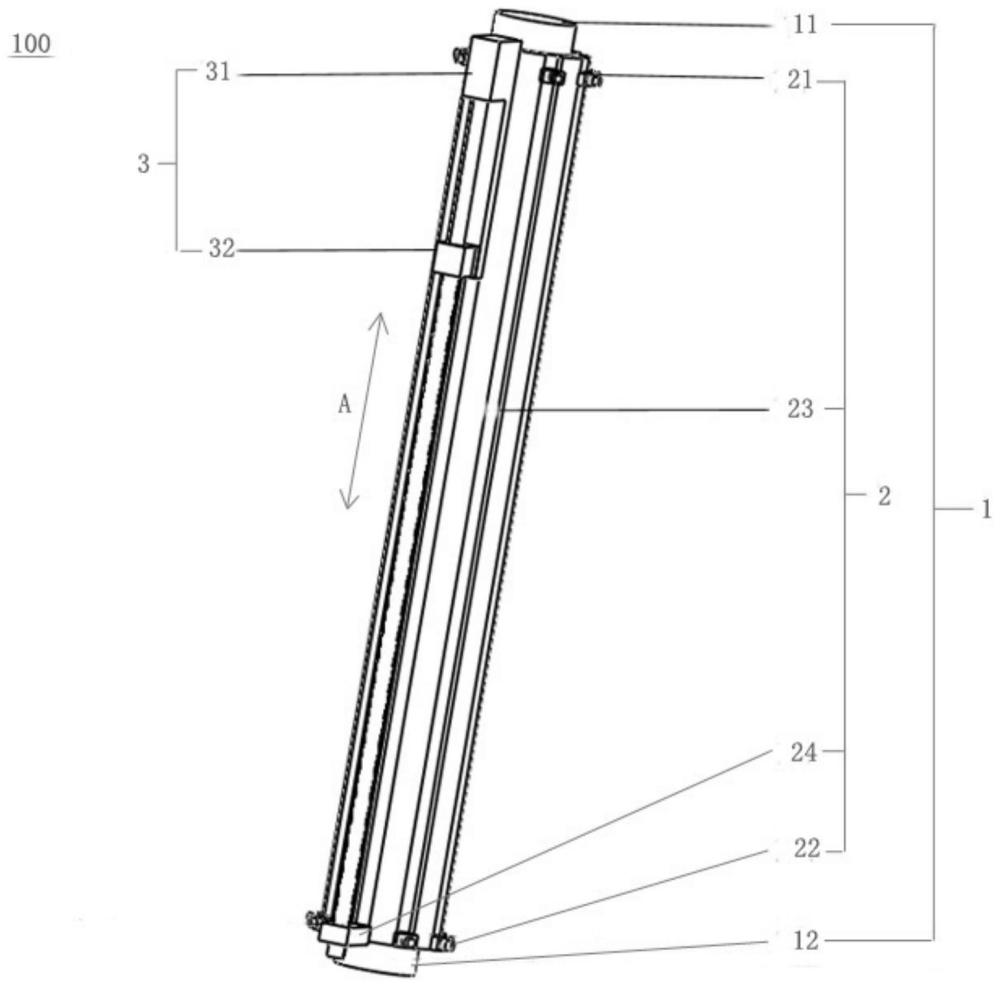
1、本说明书实施例的第一方面提供了一种穿刺设备末端,所述穿刺设备末端包括:末端本体;以及多个穿刺针安装组件,沿所述末端本体的周向设置;其中,所述多个穿刺针安装组件中的至少一个包括:设置在所述末端本体第一端的第一安装件,以及设置在所述末端本体第二端的第二安装件;其中,所述第一安装件能够相对所述末端本体沿第一方向移动,所述第二安装件能够相对所述末端本体固定设置,所述第一方向由所述第一安装件和所述第二安装件确定。
2、在一些实施例中,所述多个穿刺针安装组件中的至少一个还包括:穿刺针安装槽,用于放置穿刺针组件;所述第一安装件设置在所述穿刺针安装槽的第一端,所述第二安装件设置在所述穿刺针安装槽的第二端。
3、在一些实施例中,所述第二安装件上设置穿刺针导向结构,和/或所述末端本体上设置第一安装件导向结构。
4、在一些实施例中,当所述第二安装件上设置穿刺针导向结构时,所述穿刺针导向结构上开设导向孔,所述导向孔的轴线方向与所述第一方向平行。
5、在一些实施例中,所述第一安装件和/或所述第二安装件上设置第一可伸缩结构,所述第一可伸缩结构用于调节第一安装件和/或所述第二安装件到穿刺针组件之间的距离。
6、在一些实施例中,还包括通过第一安装件和第二安装件安装在穿刺针安装组件上的穿刺针组件,所述穿刺针组件包括内针和外针,所述外针套设在所述内针外,所述外针与所述内针通过连接结构可选择地连接或分离。
7、在一些实施例中,所述内针包括内针针体和内针针帽,所述外针包括外针针体和外针针帽;所述连接结构包括设置在所述内针针帽和所述外针针帽的其中一个上的第二可伸缩结构,以及设置在所述内针针帽和所述外针针帽的另一个上的凹陷,所述第二可伸缩结构能够与所述凹陷配合或分离。
8、在一些实施例中,所述外针的材料是电绝缘材料。
9、在一些实施例中,所述第一安装件的位置在内针的放电过程中不锁死,以使所述内针可以随所述穿刺对象的动作而移动。
10、在一些实施例中,所述末端本体的两端中至少一个设有连接接口,所述连接接口用于实现所述末端本体与机械臂之间的机械连接和电气连接。
11、本说明书实施例的第二方面提供了一种穿刺系统,包括前述任一实施例所述的穿刺设备末端,以及机械臂。
12、本说明书实施例的第三方面提供了一种穿刺系统的控制方法,包括:根据计划信息确定穿刺参数;根据所述穿刺参数确定多个目标穿刺针组件;以及控制所述多个目标穿刺针组件同步执行穿刺动作。
13、在一些实施例中,所述控制所述多个目标穿刺针组件同步执行穿刺动作,包括:控制所述目标穿刺针组件的内针和外针一起进入穿刺对象至第一位置;控制所述内针与所述外针分离;以及控制所述内针继续进入穿刺对象至第二位置。
14、在一些实施例中,所述控制所述多个目标穿刺针组件同步执行穿刺动作,还包括:控制所述内针在手术过程中放电形成电场。
15、在一些实施例中,所述控制所述多个目标穿刺针组件同步执行穿刺动作,还包括:控制所述内针从所述第二位置回退至所述第一位置;控制所述内针与所述外针连接;以及控制所述内针与所述外针一起从所述第一位置退出所述穿刺对象。
16、在一些实施例中,所述内针的位置在放电过程中不锁死,以使所述内针可以随所述穿刺对象的动作而移动。
17、本说明书实施例可以实现的有益效果包括而不限于:可以实现多个穿刺针组件的自动化布针。
技术特征:
1.一种穿刺设备末端,其特征在于,所述穿刺设备末端包括:
2.根据权利要求1所述的穿刺设备末端,其特征在于,所述多个穿刺针安装组件(2)中的至少一个还包括:
3.根据权利要求1所述的穿刺设备末端,其特征在于,所述第二安装件(22)上设置穿刺针导向结构(24),和/或所述末端本体(1)上设置第一安装件导向结构。
4.根据权利要求3所述的穿刺设备末端,其特征在于,当所述第二安装件(22)上设置穿刺针导向结构(24)时,所述穿刺针导向结构(24)上开设导向孔(241),所述导向孔(241)的轴线方向与所述第一方向平行。
5.根据权利要求1所述的穿刺设备末端,其特征在于,所述第一安装件(21)和/或所述第二安装件(22)上设置第一可伸缩结构(25),所述第一可伸缩结构(25)用于调节第一安装件(21)和/或所述第二安装件(22)到穿刺针组件(3)之间的距离。
6.根据权利要求1所述的穿刺设备末端,其特征在于,还包括通过第一安装件(21)和第二安装件(22)安装在穿刺针安装组件(2)上的穿刺针组件(3),所述穿刺针组件(3)包括内针(31)和外针(32),所述外针(32)套设在所述内针(31)外,所述外针(32)与所述内针(31)通过连接结构可选择地连接或分离。
7.根据权利要求6所述的穿刺设备末端,其特征在于,所述内针(31)包括内针针体(311)和内针针帽(312),所述外针(32)包括外针针体(321)和外针针帽(322);所述连接结构包括设置在所述内针针帽(312)和所述外针针帽(322)的其中一个上的第二可伸缩结构(3121),以及设置在所述内针针帽(312)和所述外针针帽(322)的另一个上的凹陷(3221),所述第二可伸缩结构(3121)能够与所述凹陷(3221)配合或分离。
8.根据权利要求6所述的穿刺设备末端,其特征在于,所述外针(32)的材料是电绝缘材料。
9.根据权利要求6所述的穿刺设备末端,其特征在于,所述第一安装件(21)的位置在内针(31)的放电过程中不锁死,以使所述内针(31)可以随所述穿刺对象的动作而移动。
10.根据权利要求1所述的穿刺设备末端,其特征在于,所述末端本体(1)的两端中至少一个设有连接接口,所述连接接口用于实现所述末端本体(1)与机械臂(4)之间的机械连接和电气连接。
11.一种穿刺系统,包括权利要求1-10任一项所述的穿刺设备末端,以及机械臂(4)。
12.一种穿刺系统的控制方法,其特征在于,包括:
13.根据权利要求12所述的控制方法,其特征在于,所述控制所述多个目标穿刺针组件(3)同步执行穿刺动作,包括:
14.根据权利要求13所述的控制方法,其特征在于,所述控制所述多个目标穿刺针组件(3)同步执行穿刺动作,还包括:
15.根据权利要求13或14所述的控制方法,其特征在于,所述控制所述多个目标穿刺针组件(3)同步执行穿刺动作,还包括:
16.根据权利要求14所述的控制方法,其特征在于,所述内针(31)的位置在放电过程中不锁死,以使所述内针(31)可以随所述穿刺对象的动作而移动。
技术总结
本说明书实施例提供了一种穿刺设备末端、穿刺系统及其控制方法。其中,穿刺设备末端包括:末端本体;以及多个穿刺针安装组件,沿所述末端本体的周向设置;其中,所述多个穿刺针安装组件中的至少一个包括:设置在所述末端本体第一端的第一安装件,以及设置在所述末端本体第二端的第二安装件;其中,所述第一安装件能够相对所述末端本体沿第一方向移动,所述第二安装件能够相对所述末端本体固定设置,所述第一方向由所述第一安装件和所述第二安装件确定。
技术研发人员:赵卓,黄威龙,段醉球
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!