一种带机械臂的自平衡轮椅
本发明属于医疗器械领域,具体地说,本发明设计一种带机械臂的自平衡轮椅。
背景技术:
1、目前,随着老年人和残疾人数量的不断增加,轮椅作为代步工具受到广泛关注。普通轮椅需要使用者自己转动把手或者需要他人帮助使用,使用者行动受限、较为不便,因此安全、智能化的轮椅就显得格外重要。人们尝试设计了不同智能轮椅,并进行了有益探索:
2、彭海军等人(参考文献:彭海军,杨朝中,杨浩.一种带有连续型机械臂的养老辅助智能轮椅[p].辽宁省:cn114587806a,2022-06-07.)采用电动四轮轮椅和连续型机械臂帮助老年人完成指定位置抓取物品等日常生活操作。郑柏阳等人(参考文献:郑柏阳,张天海,姚丽,陈少克,陈思源,陈志勇,宋盼盼,李志杰,刘万鑫,刘俊杰,耿至锴.一种智能轮椅[p].广东省:cn114392067a,2022-04-26.)在轮椅中增加摄像头和语音识别模块,使用人工智能算法识别用户指令,并生成控制指令,用户通过下达指令即可完成轮椅运动。
3、上述方法多采用四轮轮椅,遇到地面坑洼以及上下台阶问题时,无法有效保持其稳定性;通过指令控制轮椅运动,无法完成自主避障等;上述方法或通过语音指令进行全自主控制,或直接使用轮椅操纵杆进行半自主控制,使用时都有一定局限性。
4、不同于上述方法,本专利使用两轮轮椅可以实现上下台阶,自平衡系统保证轮椅时刻处于稳定平衡状态,通过机械臂代替人手完成一系列操作,实现轮椅智能化,选择全自主控制和半自主控制相结合的控制方法,为使用者提供更多的选择,使用者可以随时切换操作方式,提高了使用者的自理能力,极好地满足老年人和残疾人的出行需求。
技术实现思路
1、本发明的目的在于,克服现有技术存在的缺陷,在轮椅上集成机械臂,加入视觉导航定位系统,改变传统四轮电动轮椅为两轮自平衡轮椅,采用智能控制技术辅助使用者的移动和操作,提供一种带机械臂的自平衡轮椅。
2、为实现上述目的,本发明采用如下技术方案:
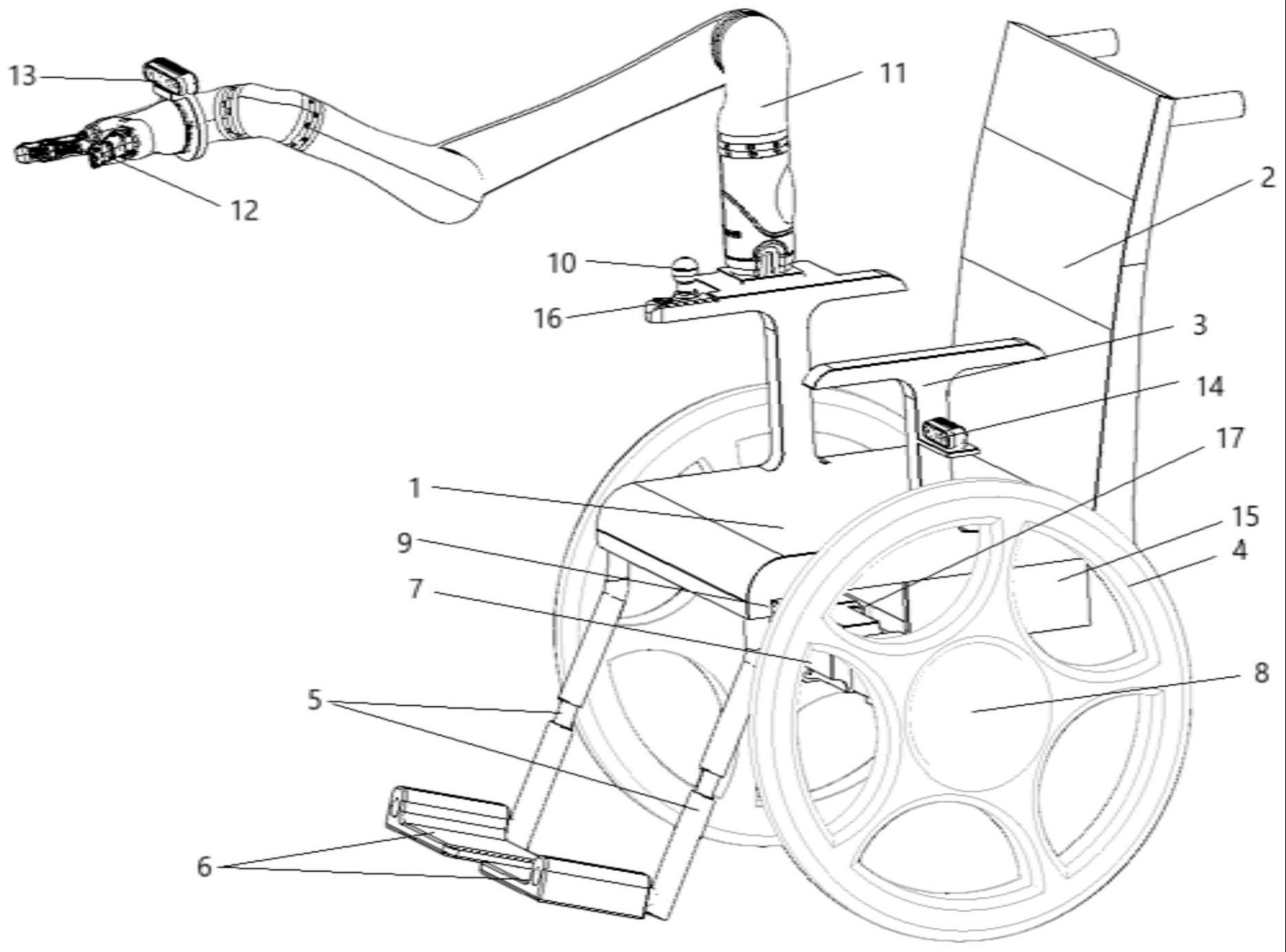
3、一种带机械臂的自平衡轮椅,包括底座1、椅背2、扶手3、车轮4、可伸缩杆5、脚托6、电气盒7、第一电机8、第二电机9、操作摇杆10、六自由度机械臂11、两指型操作手12、摄像头a13、摄像头b14、电池15、麦克风16和倾角传感器17;
4、所述椅背2设置在底座1后侧,所述车轮4共两个,分别通过第一支撑杆连接设置在底座1下方,所述扶手3竖直设置在底座1两侧,所述脚托6通过可伸缩杆5连接在底座1前侧下方,所述六自由度机械臂11连接于右侧的扶手3末端,六自由度机械臂11垂直于扶手3设置,所述操作摇杆10连接在右侧的扶手3上,位于六自由度机械臂11的前侧,所述麦克风16设置在右侧的扶手3上,位于操作摇杆10前侧,所述电气盒7设置在底座1下方的第一支撑杆上,所述摄像头b14设置在左侧的扶手3下侧,所述电池15设置于椅背2的背部,所述倾角传感器17设置于底座1的下侧,两指型操作手12设置于六自由度机械臂11的末端;两指型操作手12与六自由度机械臂11的连接处设置摄像头a13。
5、所述的电气盒7分别与第一电机8、第二电机9、操作摇杆10、六自由度机械臂11、两指型操作手12、摄像头a13、摄像头b14、电池15、麦克风16、倾角传感器17相连,电气盒7用来控制设备中各个部件的运行;电气盒7包括操作摇杆接收模块、语音识别模块、角度测量模块、路径规划模块和控制单元。
6、操作摇杆接收模块用于接收自操作摇杆10的运动信号,并将运动信号传输给控制单元,电气盒与第一电机8、第二电机9相连,第一电机8与车轮4相连,第二电机9与六自由度机械臂11相连,控制单元读取操作摇杆接收模块的控制信号,分别控制第一电机8和第二电机9使车轮4和六自由度机械臂11运动;
7、倾角传感器17检测轮椅的倾斜角度,角度测量模块用于接收来自倾角传感器17检测的倾斜角度信号,并传递信息至控制单元,控制单元通过倾斜角度信号来判断车轮4的加速或减速,进而控制第一电机8使车轮4加速或减速;
8、麦克风16接收使用者发出的语音指令,语音识别模块用于接收来自麦克风16的语音信号,语音识别模块将语音信号转换成电信号,并处理输出不同的动作指令信号,不同的动作指令信号传递信息至控制单元,控制单元分别控制第一电机8和第二电机9使车轮4和六自由度机械臂11运动;
9、摄像头a13用于采集两指型操作手12的动作图像,摄像头b14用于采集轮椅前方的情景图像;路径规划模块接收来自摄像头a13、摄像头b14的图像,经过图像处理、识别、定位,生成合理的路径规划方案,控制单元分别控制第一电机8和第二电机9使车轮4和六自由度机械臂11运动;
10、本发明的有益效果是:本发明提供了一种带机械臂的自平衡轮椅,包括轮椅椅背、底座、扶手、车轮、脚托、六自由度机械臂、操作摇杆、麦克风、摄像头、电气盒和电池,通过电机驱动轮椅和机械臂进行运动,保持轮椅自平衡状态,同时,加入语音识别模块、路径规划模块,使用者可选择全自主驱动模式或半自主驱动模式,全自主驱动模式即语音控制轮椅和机械臂运动,半自主模式即操作摇杆控制轮椅和机械臂的运动,摄像头和路径规划模块辅助完成精准抓取和轮椅避障任务。丰富了轮椅功能的多样性,提高了使用者的自理能力,解决了现有技术中轮椅功能单一的问题。
技术特征:
1.一种带机械臂的自平衡轮椅,其特征在于,包括底座(1)、椅背(2)、扶手(3)、车轮(4)、可伸缩杆(5)、脚托(6)、电气盒(7)、第一电机(8)、第二电机(9)、操作摇杆(10)、六自由度机械臂(11)、两指型操作手(12)、摄像头a(13)、摄像头b(14)、电池(15)、麦克风(16)和倾角传感器(17);
技术总结
本发明公开了一种带机械臂的自平衡轮椅,属于医疗器械领域。包括轮椅椅背、底座、扶手、车轮、脚托、六自由度机械臂、操作摇杆、麦克风、摄像头、电气盒和电池,通过电机驱动轮椅和机械臂进行运动,保持轮椅自平衡状态,同时,加入语音识别模块、路径规划模块,使用者可选择全自主驱动模式或半自主驱动模式,全自主驱动模式即语音控制轮椅和机械臂运动,半自主模式即操作摇杆控制轮椅和机械臂的运动,摄像头和路径规划模块辅助完成精准抓取和轮椅避障任务。丰富了轮椅功能的多样性,提高了使用者的自理能力,解决了现有技术中轮椅功能单一的问题。
技术研发人员:辛桂阳,刘琛,郭栩铭,曾繁练,张涧,王思博,覃开蓉
受保护的技术使用者:大连理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!