手术机器人从端操作设备及压力检测装置、数据处理方法与流程
本申请属于医疗设备,具体涉及一种手术机器人从端操作设备及压力检测装置、数据处理方法。
背景技术:
1、近些年来,随着医疗技术的不断发展,手术机器人的开发也在日渐完善,并且已在很多场景得到应用。其中,技术比较成熟,应用频率比较高的是主从式血管介入手术机器人系统。主从式血管介入手术机器人系统包括主端控制设备和从端操作设备,其中,主端控制设备由医生操作,并能够控制从端操作设备进行手术操作。具体地,主端控制设备通过直线位移传感器采集医生手部的位移信号,并将检测的位移信号发送至从端操作设备的驱动机构上,驱动机构接收到位移信号后将带动从端手术设备的操作部件位移,进行手术操作。而从端操作设备在进行手术操作时,先采集驱动机构产生的压力,并根据该压力计算手术刀移动距离和方向。
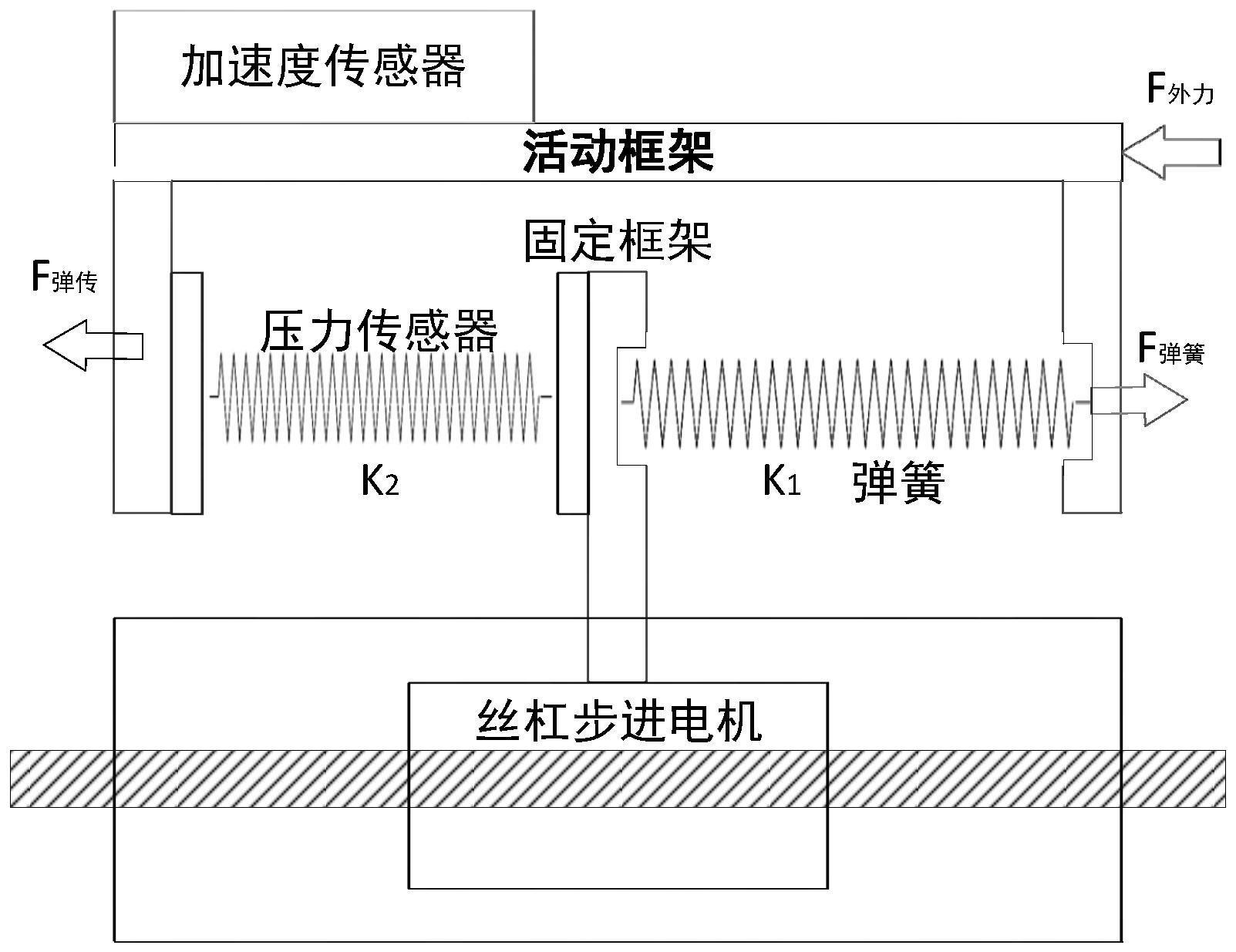
2、现有技术中,用于采集上述驱动机构产生压力的压力检测装置及其原理如图1所示,该压力检测装置包括固定框架01、活动框架02(其上可固定进行手术操作的手术刀)、压力传感器03及电机(图中未示出),且电机与固定框架01刚性连接,以带动整体进行运动。活动框架02可在滑轨上沿其轴线方向自由移动的活动框架。弹簧04一侧顶住固定框架01,另一侧顶住整个活动框架02,间接通过活动框架02压住压力传感器03。当有外力作用在活动框架上时,弹簧04会发生形变,同时,压力传感器03就会产生压力变化,从而间接检测到外力。
3、但是,上述压力采集过程中,采集的压力通常具有一定的噪声,该噪声主要来源于振动(加速度),包括电机的抖动、电机加减速阶段、以及外部振动的传递等,当这些振动(加速度)作用到活动框架时,会产生相应的作用力,造成二次振动,增加噪声,致使采集的压力值不够准确。
技术实现思路
1、本申请提出一种手术机器人从端操作设备及压力检测装置、数据处理方法,能够有效去掉压力采集过程中的振动噪声,提高采集数据的可信度。
2、本申请第一方面实施例提出了一种压力检测装置,应用于手术机器人从端操作设备,包括:
3、固定框架,与驱动电机刚性连接,包括凸起的第一连接部;
4、活动框架,包括位于所述第一连接部两侧的第二连接部;
5、传感器组件,包括设置于所述第一连接部和所述第二连接部之间的压力传感器,用于检测所述活动框架与所述固定框架之间的作用力;以及,固定在所述活动框架上的加速度传感器,用于检测所述活动框架的加速度;
6、微处理模块,基于所述压力传感器的第一检测结果和所述加速度传感器的第二检测结果,确定作用在所述活动框架的作用力。
7、在一些实施例中,所述传感器组件还包括弹性元件,所述弹性元件和所述压力传感器分别固定在所述第一连接部的两侧,且所述压力传感器与所述第二连接部活动接触,所述弹性元件与所述第二连接部抵接。
8、在一些实施例中,所述第二连接部包括第一接触面,所述压力传感器与所述第一接触面活动接触;
9、所述活动框架还包括与所述第二连接部连接的主体部,所述加速度传感器固定在所述主体部,并沿所述第一接触面的法线方向设置。
10、本申请第二方面的实施例提供了一种压力数据处理方法,应用于第一方面任一项所述的压力检测装置,所述方法包括:
11、在从端操作设备运动过程中,获取压力传感器的第一检测结果、加速度传感器的第二检测结果,以及所述从端操作设备当前的加速度理论参数;
12、对所述第二检测结果和所述加速度理论参数进行融合,得到加速度预估参数;
13、基于所述加速度预估参数对所述第一检测结果进行滤波,得到作用在活动框架上的实际作用力参数。
14、在一些实施例中,获取所述从端操作设备当前的加速度理论参数,包括:
15、基于接收到的位移目标、所述从端操作设备的当前移动速度及预设加速度,确定加速度方向和加速度持续时间;
16、根据所述预设加速度和活动框架的质量,计算加速度产生的理论作用力;根据所述加速度方向和所述加速度持续时间确定所述理论作用力的持续时间和方向。
17、在一些实施例中,对所述第二检测结果和所述加速度理论参数进行融合,得到加速度预估参数,包括:
18、确定各时刻对应的加速度数据组,各所述加速度数据组均包括所述第二检测结果中的加速度检测参数和所述加速度理论参数;
19、对每组所述加速度检测参数和所述加速度理论参数分别进行卡尔曼滤波,得到各时刻对应的加速度预估参数。
20、在一些实施例中,对每组所述加速度检测参数和所述加速度理论参数分别进行卡尔曼滤波,得到各时刻对应的加速度预估参数,包括:
21、对于每个加速度数据组,基于所述加速度检测参数和所述加速度理论参数,分别计算各自对应的加速度检测协方差和加速度理论协方差;
22、分别将每个加速度数据组、对应的加速度检测协方差和加速度理论协方差,传递至卡尔曼滤波器,得到各时刻对应的加速度预估参数。
23、在一些实施例中,基于所述加速度预估参数对所述第一检测结果进行滤波,得到作用在活动框架上的实际作用力参数,包括:
24、基于所述加速度预估参数和所述第一检测结果,得到对应的加速度预估作用力的大小和方向,以及作用在活动框架上的作用力测量值的大小和方向;
25、基于所述加速度预估作用力的大小和方向对所述作用力测量值的大小和方向进行补偿,得到作用在活动框架上的作用力实际值的大小和方向。
26、本申请第三方面的实施例提供了一种压力数据处理装置,包括:
27、数据获取模块,用于在从端操作设备运动过程中,获取压力传感器的第一检测结果、加速度传感器的第二检测结果,以及所述从端操作设备当前的加速度理论参数;
28、第一数据处理模块,用于对所述第二检测结果和所述加速度理论参数进行融合,得到加速度预估参数;
29、第二数据处理模块,用于基于所述加速度预估参数对所述第一检测结果进行滤波,得到作用在活动框架上的实际作用力参数。
30、本申请第四方面的实施例提供了一种手术机器人从端操作设备,包括第一方面任一项所述的压力检测装置,和/或第三方面所述压力数据处理装置。
31、本申请实施例中提供的技术方案,至少具有如下技术效果或优点:
32、本申请实施例提供的压力检测装置,其传感器组件不仅包括用于检测活动框架所受作用力的压力传感器,还包括加速度传感器,该加速度传感器可以直接测量活动框架的加速度,微处理模块可基于压力传感器的第一检测结果和加速度传感器的第二检测结果,融合上述主动式滤波和加速度传感器滤波两种滤波方式,确定作用在活动框架的作用力。从而克服了主动式滤波不能滤除电机控制外的噪声,以及加速度传感器滤波将本身存在的噪声会引入系统的弊端,从而得到准确的压力检测值。
技术特征:
1.一种压力检测装置,其特征在于,应用于手术机器人从端操作设备,包括:
2.根据权利要求1所述的压力检测装置,其特征在于,所述传感器组件还包括弹性元件,所述弹性元件和所述压力传感器分别固定在所述第一连接部的两侧,且所述压力传感器与所述第二连接部活动接触,所述弹性元件与所述第二连接部抵接。
3.根据权利要求1或2所述的压力检测装置,其特征在于,所述第二连接部包括第一接触面,所述压力传感器与所述第一接触面活动接触;
4.一种压力数据处理方法,其特征在于,应用于权利要求1-3任一项所述的压力检测装置,所述方法包括:
5.根据权利要求4所述的方法,其特征在于,获取所述从端操作设备当前的加速度理论参数,包括:
6.根据权利要求4所述的方法,其特征在于,对所述第二检测结果和所述加速度理论参数进行融合,得到加速度预估参数,包括:
7.根据权利要求6所述的方法,其特征在于,对每组所述加速度检测参数和所述加速度理论参数分别进行卡尔曼滤波,得到各时刻对应的加速度预估参数,包括:
8.根据权利要求4所述的方法,其特征在于,基于所述加速度预估参数对所述第一检测结果进行滤波,得到作用在活动框架上的实际作用力参数,包括:
9.一种压力数据处理装置,其特征在于,包括:
10.一种手术机器人从端操作设备,其特征在于,包括权利要求1-3任一项所述的压力检测装置,和/或权利要求9所述压力数据处理装置。
技术总结
本申请提出一种手术机器人从端操作设备及压力检测装置、数据处理方法,该压力检测装置,应用于手术机器人从端操作设备,包括:固定框架,与驱动电机刚性连接,包括凸起的第一连接部;活动框架,包括位于第一连接部两侧的第二连接部;传感器组件,包括设置于第一连接部和第二连接部之间的压力传感器,用于检测活动框架与固定框架之间的作用力;以及,固定在活动框架上的加速度传感器,用于检测活动框架的加速度;微处理模块,基于压力传感器的第一检测结果和加速度传感器的第二检测结果,确定作用在活动框架的作用力。本申请能够有效去掉压力采集过程中的振动噪声,提高采集数据的可信度。
技术研发人员:曹晟,姚刚
受保护的技术使用者:深圳市爱博医疗机器人有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!