腹腔镜手术用组织牵拉器和组织牵拉方法与流程
1.本发明涉及医疗器材领域,具体而言,涉及一种腹腔镜手术用组织牵拉器和组织牵拉方法。
背景技术:
2.在腹腔镜手术中,通常存在如下情景:手术助手有时无法很好的进行组织牵拉、暴露目标手术区域;有的手术难度较大,暴露手术区域相对困难;为了获得良好的目标手术区域显露,也可以增加腹壁穿刺器的数量,再经穿刺器置入腹腔镜操作钳抓持相应组织。但腹壁穿刺器也会对腹壁造成一定程度的损伤,如腹壁出血、腹壁肌肉撕裂等。如此,在腹腔镜手术中,在面对既要降低对腹壁组织损伤,还要满足较好的暴露目标手术区域的情境时,手术存在较大困难。
技术实现要素:
3.本发明的目的在于提供一种腹腔镜手术用组织牵拉器和组织牵拉方法,其能够同时在不过多增加腹壁组织损伤的基础上,满足较好的暴露目标手术区域的要求,使手术更便捷;同时还可节省人力,降低手术助手的配合压力。
4.本发明的实施例是这样实现的:
5.第一方面,本发明提供一种腹腔镜手术用组织牵拉器,包括:
6.穿刺针、拉线、夹持件和定位件,所述穿刺针通过所述拉线与所述夹持件连接,所述穿刺针用于从腹腔内部穿出至腹腔外部,并带动所述拉线穿出腹壁;所述夹持件用于夹持腹壁组织,所述定位件用于贴合在腹壁表皮且夹持所述拉线。
7.在可选的实施方式中,所述穿刺针设置为直针。
8.在可选的实施方式中,所述夹持件设置为抓持夹,所述抓持夹用于夹持组织。
9.在可选的实施方式中,所述夹持件包括转轴、弹性件和两根夹臂,所述两根夹臂通过所述转轴可转动地连接,每根所述夹臂上均设置有咬合齿,所述两根夹臂上的咬合齿配合以夹持组织;所述弹性件同时与所述两根夹臂连接,用于使所述两根夹臂的咬合齿具有相互靠近的趋势。
10.在可选的实施方式中,所述弹性件的弹力可调,从而能调节所述两根夹臂的咬合力。
11.在可选的实施方式中,所述弹性件包括第一弹性体、第二弹性体和可伸缩的连接体,所述第一弹性体与所述第二弹性体分别与所述连接体的两端连接,所述第一弹性体和所述第二弹性体远离所述连接体的一端分别与所述两根夹臂连接,所述连接体用于调整所述第一弹性体和第二弹性体的弹力。
12.在可选的实施方式中,所述连接体包括双螺头、第一螺纹筒和第二螺纹筒,所述第一螺纹筒和第二螺纹筒分别与所述双螺头的两端螺接,所述第一螺纹筒和所述第二螺纹筒分别与所述第一弹性体和第二弹性体连接;通过旋拧所述双螺头,能使所述第一螺纹筒和
第二螺纹筒同步靠近或远离。
13.在可选的实施方式中,所述定位件设置为夹钳。
14.第二方面,本发明提供一种基于前述实施方式中任一项所述的腹腔镜手术用组织牵拉器的组织牵拉方法,所述方法包括:
15.将相连的穿刺针、拉线和夹持件均置入腹腔内,将穿刺针从内向外穿过腹壁并使拉线穿出腹腔;
16.将定位件贴合在腹壁表皮并夹持位于腹腔外的所述拉线;
17.利用所述夹持件夹持腹腔内的组织。
18.在可选的实施方式中,在腹壁上穿刺腹壁穿刺器,利用所述腹壁穿刺器的通道将相连的穿刺针、拉线和夹持件置入腹腔内。
19.本发明实施例的有益效果是:
20.综上所述,本实施例提供的腹腔镜用手术组织牵拉器,使用时,能通过腹腔镜手术过程中本就需使用的,且已经置于腹壁上的进行手术的腹壁穿刺器将组织牵拉器的穿刺针、拉线和夹持件输送至腹腔内,然后,利用腹腔镜操作钳,将穿刺针从腹腔内向外穿过腹壁,利用穿刺针将拉线带出腹腔,使拉线的一部分暴露在腹腔外。然后,将定位件贴合在腹壁表皮,利用定位件夹持拉线,使拉线相对于腹壁的位置固定。接着,再利用夹持件夹持腹腔内相应位置的组织,使组织被拉扯后暴露出目标手术区域。并且,通过调整定位件的状态,使拉线能相对于定位件滑动,从而通过拉线拉动夹持件,进而调整组织被拉扯的程度,更好的暴露目标手术区域。当拉线拉动后,定位件恢复位置,保持夹紧拉线的状态。如此设计,减少了腹壁穿刺器的使用,减少了对腹壁组织的损伤,同时目标手术区域也能够更好的暴露出来,增加了手术的便捷性,提高了手术效率,利于患者康复。
附图说明
21.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
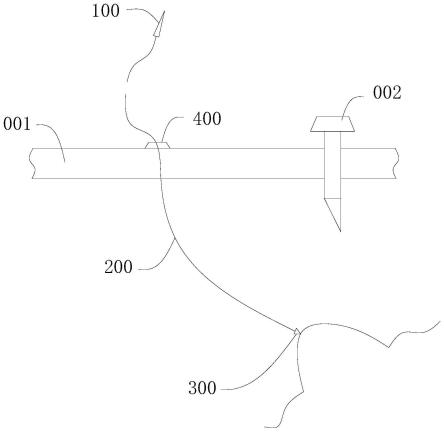
22.图1为本发明实施例的腹腔镜手术用组织牵拉器的应用示意图;
23.图2为本发明实施例的腹腔镜手术用组织牵拉器的结构示意图;
24.图3为本发明实施例的第一弹性件的结构示意图;
25.图4为本发明实施例的定位件的结构示意图。
26.图标:
27.001-腹壁;002-腹壁穿刺器;100-穿刺针;200-拉线;300-夹持件;310-转轴;320-第一弹性件;321-第一弹性体;322-第二弹性体;323-连接体;3231-双螺头;3232-第一螺纹筒;3233-第二螺纹筒;330-夹臂;331-咬合齿;400-定位件;410-基体;411-装配孔;412-第一内壁;413-第二内壁;420-滑动体;430-第二弹性件;440-定位通道。
具体实施方式
28.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例
中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
29.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
31.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
32.此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
33.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
34.目前,在进行腹腔镜手术过程中,有时因目标手术区域周围影响操作的组织过多,或助手配合不佳,或缺少助手,导致目标手术区域不能达到满足手术要求的显露,进而增加了手术困难,也延长了手术时间。为了获得良好的目标手术区域显露,可以增加腹壁穿刺器,再经穿刺器置入腹腔镜操作钳抓持相应组织。但腹壁穿刺器也会对腹壁造成一定程度的损伤,如腹壁出血、腹壁肌肉撕裂等。
35.鉴于此,设计者提供了一种腹腔镜手术用组织牵拉器,能与腹腔镜手术过程中本就会使用的腹壁穿刺器配合,既能够有效暴露目标手术区域,使手术更加便捷;同时还可节省人力,降低手术助手的配合压力。
36.请结合图1-图4,本实施例中,腹腔镜手术用组织牵拉器包括穿刺针100、拉线200、夹持件300和定位件400,穿刺针100通过拉线200与夹持件300连接,穿刺针100用于从腹腔内部穿出至腹腔外部,并带动拉线200穿出腹壁;夹持件300用于夹持腹壁组织,定位件400用于贴合在腹壁表皮且夹持拉线200。
37.本实施例提供的腹腔镜手术用组织牵拉器的使用方法如下:
38.使用时,通过腹腔镜手术过程中本就需使用的,且已经置于腹壁上的进行手术的腹壁穿刺器002将组织牵拉器的穿刺针100、拉线200和夹持件300输送至腹腔内,然后,利用腹腔镜操作钳,将穿刺针100从腹腔内向外穿过腹壁,利用穿刺针100将拉线200带出腹腔,
使拉线200的一部分暴露在腹腔外。然后,将定位件400贴合在腹壁表皮,利用定位件400夹持拉线200,使拉线200相对于腹壁的位置固定。接着,再利用夹持件300夹持腹腔内相应位置的组织,使组织被拉扯后暴露出目标手术区域。
39.并且,实际使用过程中,可以通过调整定位件400的状态,使拉线200能相对于定位件400滑动,从而通过拉线200拉动夹持件300,进而调整组织被拉扯的程度,更好的暴露目标手术区域。当拉线200拉动设定长度后,使定位件400恢复原有状态,也即恢复至保持夹紧拉线200的状态,拉线200调整后不会自动相对于腹壁001滑动,使腹腔内目标组织始终保持设定的被拉扯的状态。应当理解,在初始状态下,可以使拉线200处于腹腔内的长度较长,便于移动夹持件300从而通过夹持件300夹持腹腔内的组织。
40.如此设计,在腹腔镜手术时,在不过多增加腹壁组织损伤的基础上,满足较好的暴露目标手术区域的要求,使手术更便捷。同时还可节省人力,降低手术助手的配合压力。
41.本实施例中,可选的,穿刺针100设置为直针,穿刺针100的长度可以设置为4cm-6cm,穿刺针100的直径可以设置为0.2mm-0.4mm。例如,本实施例中,穿刺针100的长度为5cm,穿刺针100的直径为0.3mm。显然,在其他实施例中,穿刺针100的长度可以为4cm或6cm等,穿刺针100的直径可以为0.2mm或0.4mm等。
42.本实施例中,可选的,拉线200可以设置为聚丙烯线。拉线200的横断面形状可以为圆形,拉线200的直径可以设置为0.2mm-0.4mm,例如,拉线200的直径为0.2mm、0.3mm或0.4mm等。此外,拉线200的长度可以按需设置,本实施例中不进行具体限定。
43.请结合图2,本实施例中,可选的,夹持件300可以设置为抓持夹,定位件400可以设置为夹钳。其中,夹持件300包括转轴310、第一弹性件320和两根夹臂330。两根夹臂330通过转轴310可转动地连接,每根夹臂330上均设置有咬合齿331,两根夹臂330上的咬合齿331配合以夹持组织。拉线200可以与转轴310连接,或者拉线200与两根夹臂330中的一个连接。第一弹性件320同时与两根夹臂330连接,用于使两根夹臂330的咬合齿331具有相互靠近的趋势。例如,每根夹臂330具有相对的第一端和第二端,咬合齿331设于夹臂330的内侧且靠近第一端设置。第一弹性件320的端部抵持在夹臂330的内侧且靠近第二端设置。在初始状态下,第一弹性件320呈压缩状态,第一弹性件320具有恢复形变的弹力,从而使两个第二端具有远离的运动趋势,使两个第一端具有靠近的运动趋势,也即夹持件300处于咬合齿331相互咬合的状态。需要夹持组织时,施力于两个夹臂330的第二端,两个夹臂330相对于转轴310转动,即夹臂330的两个第二端相互靠近,从而使两个第一端相互远离,然后将第一端靠近组织并使部分组织位于两个夹臂330的咬合齿331之间,松开第二端,在第一弹性件320的作用下,两个咬合齿331咬合组织。
44.需要说明的是,咬合齿331的齿尖可以设置为钝头,从而不易刺破组织,使用更加安全。
45.请结合图3,进一步的,第一弹性件320的弹力可调,从而能调节两根夹臂330的咬合力,从而更好的夹持组织,在保证夹紧力的前提下,不易造成组织的损伤。例如,本实施例中,第一弹性件320包括第一弹性体321、第二弹性体322和可伸缩的连接体323,第一弹性体321与第二弹性体322分别与连接体323的两端连接,第一弹性体321和第二弹性体322远离连接体323的一端分别与两根夹臂330连接,连接体323用于调整第一弹性体321和第二弹性体322的弹力,也即连接体323通过调整其长度,能够改变第一弹性体321和第二弹性体322
的压缩量,从而调整夹紧力。当连接体323的长度变长时,第一弹性体321和第二弹性体322的压缩量增加,弹力增大,夹紧力增大。当连接体323的长度变短时,第一弹性体321和第二弹性体322的压缩量减小,弹力减小,夹紧力减小。
46.可选的,连接体323包括双螺头3231、第一螺纹筒3232和第二螺纹筒3233,第一螺纹筒3232和第二螺纹筒3233分别与双螺头3231的两端螺接,第一螺纹筒3232和第二螺纹筒3233分别与第一弹性体321和第二弹性体322连接;通过旋拧双螺头3231,能使第一螺纹筒3232和第二螺纹筒3233同步靠近或远离。其中,连接体323为圆柱体,连接头的外周面设置有旋向相反的两段螺纹,两段螺纹之间具有间距,在两段螺纹之间的连接体323的表面设置有施力平面,通过工具夹持施力平面能够带动双螺头3231转动。其中,转动双螺头3231时,可以握持两个夹臂330中的至少一个。
47.进一步的,可以在双螺头3231的外周面上设置刻度线,通过观察刻度线能够清楚知晓连接体323的实时长度,调节更加灵活可靠。
48.应当理解,第一弹性体321和第二弹性体322均可以为弹簧。
49.请结合图4,本实施例中,可选的,定位件400包括基体410、滑动体420和第二弹性件430,基体410上设置有装配孔411,并且基体410具有参与形成装配孔411的且相对设置的第一内壁412和第二内壁413,第一内壁412上设置有第一定位槽。滑动体420位于装配孔411内且贯穿第一内壁412,滑动体420的部分伸出装配孔411。滑动体420上设置有第二定位槽,第一定位槽和第二定位槽配合可以形成定位通道440。第二弹性件430可以设置为弹簧、弹片或橡胶件等。第二弹性件430被夹持于第二内壁413和滑动体420之间,使滑动体420始终保持抵接在第一内壁412上的位置。拉线200穿设于定位通道440内。当需要利用定位件400夹持拉线200时,此时,拉线200在穿刺针100的带动下穿出腹壁001并位于腹腔外,按压滑动体420和基体410,使滑动体420远离第一内壁412,利用穿刺针100穿过第一内壁412和滑动体420之间形成的空间,使拉线200位于第一定位槽或第二定位槽所在位置,然后,松开滑动体420和基体410,在第二弹性件430的作用下,滑动体420和基体410配合将拉线200夹紧在定位通道440中。也就是说,当需要调整拉线200位于腹腔内的长度,以调节对于腹壁组织拉扯程度时,按压滑动体420和基体410,克服第二弹性件430的弹力使滑动体420远离第一内壁412即可,当拉线200位置调整后,松开滑动体420和基体410,从而夹持拉线200。
50.本实施例提供的腹腔镜手术用组织牵拉器,在不过多增加腹壁组织损伤的基础上,满足较好的暴露目标手术区域的要求,使手术更便捷。同时还可节省人力,降低手术助手的配合压力。
51.本实施例还提供了一种组织牵拉方法,基于上述的腹腔镜手术用组织牵拉器,该组织牵拉方法包括:
52.将相连的穿刺针100、拉线200和夹持件300均置入腹腔内,将穿刺针100从内向外穿过腹壁并使拉线200穿出腹腔;
53.将定位件400贴合在腹壁表皮并夹持位于腹腔外的拉线200;
54.利用夹持件300夹持腹腔内的组织,并且可以通过拉动拉线200来调整组织被牵拉的程度。
55.可选的,通过腹腔镜手术时本就需使用的,且已经置于腹壁上的进行手术的腹壁穿刺器002的通道,将相连的穿刺针100、拉线200和夹持件300置入腹腔内。应当理解,可以
通过一个腹壁穿刺器002依次将多个组织牵拉器置入到腹腔中,从而对不同位置或者同一手术区域的组织进行多个位置的拉扯,提高手术的便捷性。
56.需要说明的是,在利用穿刺针100将拉线200穿出腹壁001后,可以利用剪刀等工具将拉线200剪断,去除穿刺针100,提高手术的安全性。并且,当手术完成后,松开定位件400,在腹腔内拉动拉线200,使拉线200位于腹腔外的部分再次回到腹腔内,然后从腹壁穿刺器002的通道处取出,穿刺针100不会影响拉线200退回到腹腔内,不易造成二次损伤。
57.本实施例提供的组织牵拉方法,操作便捷灵活,对手术区域组织牵拉更加到位,使手术区域显露更彻底,增加了手术操作的便捷性。
58.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1