一种手术机器人系统的制作方法
本发明涉及智慧医疗领域,尤其涉及一种手术机器人系统。
背景技术:
1、随着医疗技术的快速发展,腔镜手术方式已越来越受到患者青睐,并逐渐成为外科手术的主流方式。然而,腔镜手术种类繁多,不同的腔镜手术对医生的技术和体力要求不同。传统的腔镜手术存在诸多问题:医生眼手不协调、灵活度低、操作受限,以及长时间手术操作产生的疲劳震颤等,在不同程度上提高了腔镜手术的难度和风险。
2、目前腔镜手术机器人系统存在体积庞大、系统封闭、学习曲线长、术前调试准备繁琐、术中医生与助手和患者缺乏过程交互等问题,即现有方案的智能化程度较低。
技术实现思路
1、本发明提供了一种手术机器人系统,用于实现腔镜手术的自动化并提高腔镜手术过程的智能性。
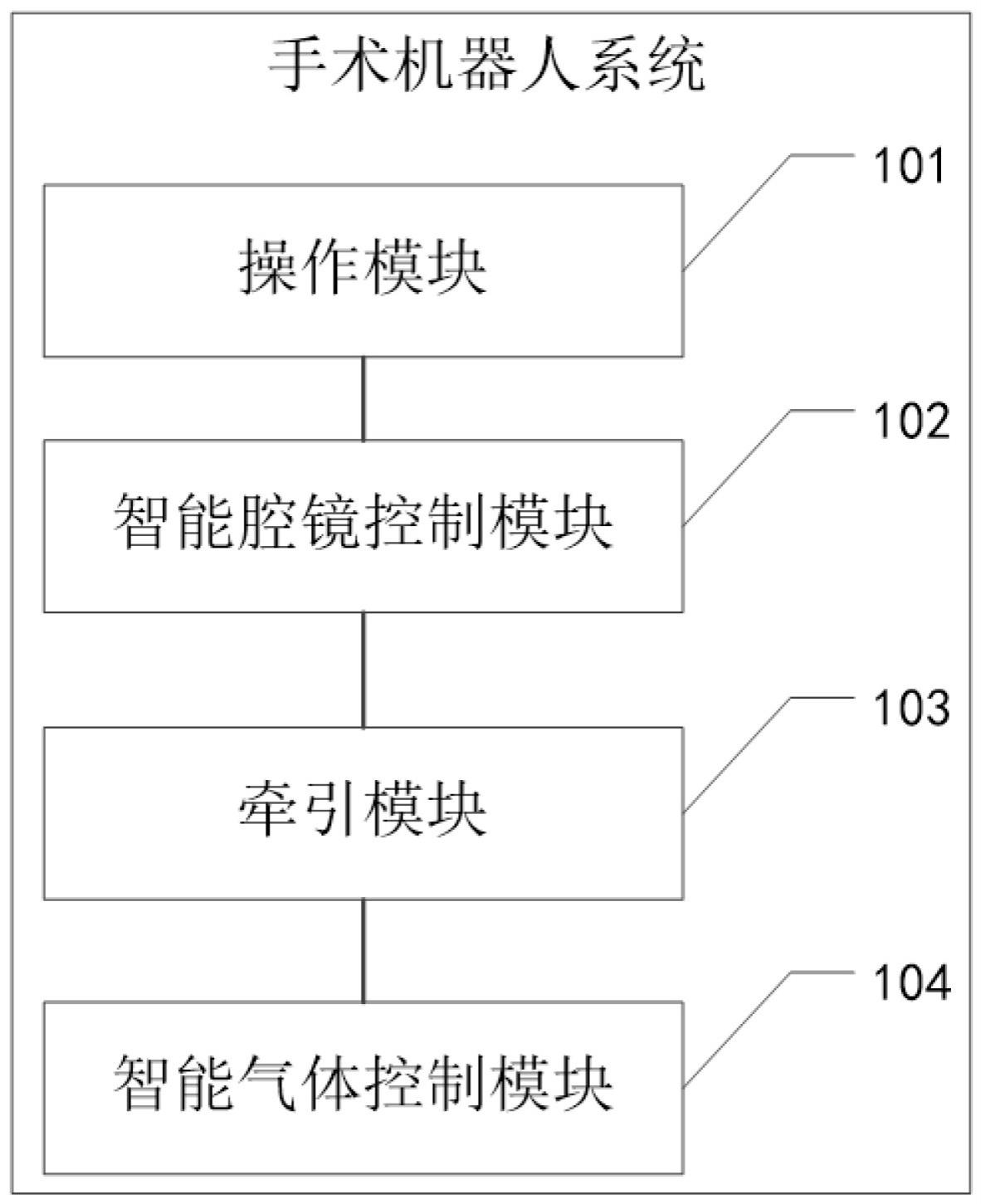
2、本发明第一方面提供了一种手术机器人系统,所述手术机器人系统包括:操作模块和智能腔镜控制模块;所述操作模块用于:采集按钮操作数据,并根据所述按钮操作数据生成腔镜运动信号;以及将所述腔镜运动信号发送至所述智能腔镜控制模块;所述智能腔镜控制模块用于:响应于所述腔镜运动信号,并基于预设的目标控制模式对智能腔镜机器人的行进过程进行腔镜运动控制;以及采集目标手术位置的腹腔图像数据,并根据所述腹腔图像数据动态调整所述目标手术位置的手术视野。
3、在本发明第一方面的第一种实现方式中,所述手术机器人系统还包括:牵引模块;所述牵引模块用于:调用预设的牵引装置设置所述目标手术位置的目标固定角度;以及按照所述目标固定角度对目标手术位置进行牵引固定。
4、在本发明第一方面的第二种实现方式中,所述手术机器人系统还包括:智能气体控制模块;所述智能气体控制模块用于:对所述腹腔压力数据进行腹部气体状态分析,得到腹部气体状态分析结果;以及根据所述腹部气体状态分析结果生成腹部气体控制策略;以及根据所述腹部气体控制策略对所述目标手术位置进行智能气体控制。
5、在本发明第一方面的第三种实现方式中,所述智能腔镜控制模块包括:智能腔镜机器人、内窥镜连接件、内窥镜、显示屏以及控制单元;所述智能腔镜机器人与所述内窥镜通过所述内窥镜连接件连接;所述内窥镜固定于所述内窥镜连接件上;所述内窥镜用于:获取所述目标手术位置的腹腔图像数据,并将所述腹腔图像数据传输至所述显示屏;所述显示屏用于:接收所述腹腔图像数据,并对所述腹腔图像数据进行可视化展示。
6、在本发明第一方面的第四种实现方式中,所述控制单元还包括:目标跟踪子单元、模式切换子单元以及运动控制子单元;所述目标跟踪子单元与所述内窥镜连接;所述模式切换子单元与所述操作模块连接;所述运动控制子单元与所述智能腔镜机器人连接。
7、在本发明第一方面的第五种实现方式中,所述目标跟踪子单元具体用于:获取所述内窥镜对应的器械头端标识,并对所述器械头端标识进行检测跟踪,得到标识信息,其中,所述标识信息包括:标识的器械编号、标识的中心点像素坐标以及标识的像素面积信息。
8、在本发明第一方面的第六种实现方式中,所述模式切换子单元具体用于:响应于模式切换信号,对所述智能腔镜机器人进行操作模式切换,得到切换后的目标操作模式,其中,所述目标操作模式包括:自动跟踪模式和手动调节模式;以及根据所述目标操作模式对所述智能腔镜机器人进行操作状态监测,得到操作状态信息。
9、在本发明第一方面的第七种实现方式中,所述运动控制子单元具体用于:接收目标控制指令,并根据所述目标控制指令和预置的运动控制策略控制所述智能腔镜机器人按照预设运动方向进行移动,其中,所述运动控制策略包括:左、右、上、下以及井深。
10、在本发明第一方面的第八种实现方式中,所述操作模块还包括:全角度手术器械;所述全角度手术器械中设置有多个控制按钮;所述全角度手术器械用于:基于所述多个控制按钮获取按钮操作数据,并根据所述按钮操作数据生成腔镜运动信号,其中,所述腔镜运动信号包括:左运动信号、右运动信号、上运动信号、下运动信号以及井深运动信号。
11、在本发明第一方面的第九种实现方式中,所述操作模块具体用于:当所述目标操作模式为手动调节模式时,实时响应所述按钮操作数据并生成腔镜运动信号;以及当所述目标操作模式为自动跟踪模式时,控制所述智能腔镜机器人进行自动运动。
12、本发明提供的技术方案中,本发明针对现有方案中存在的问题,基于深度学习技术和机器人技术,提出了一种模块化集成和便携式手术机器人系统方案,该系统包括:操作模块和智能腔镜控制模块;所述操作模块用于:采集按钮操作数据,并根据所述按钮操作数据生成腔镜运动信号;以及将所述腔镜运动信号发送至所述智能腔镜控制模块;所述智能腔镜控制模块用于:响应于所述腔镜运动信号,并基于预设的目标控制模式对智能腔镜机器人的行进过程进行腔镜运动控制;以及采集目标手术位置的腹腔图像数据,并根据所述腹腔图像数据动态调整所述目标手术位置的手术视野,本发明降低了腔镜机器人手术对手术空间的要求,从而减少了制造成本和应用成本,并且利用深度学习图像算法和机器人控制技术实现手术视野的自动跟随,降低了学习曲线和手术难度,进而实现了腔镜手术的自动化并提高腔镜手术过程的智能性。
技术特征:
1.一种手术机器人系统,其特征在于,所述手术机器人系统包括:操作模块和智能腔镜控制模块;
2.根据权利要求1所述的手术机器人系统,其特征在于,所述手术机器人系统还包括:牵引模块;所述牵引模块用于:调用预设的牵引装置设置所述目标手术位置的目标固定角度;以及按照所述目标固定角度对目标手术位置进行牵引固定。
3.根据权利要求1或2所述的手术机器人系统,其特征在于,所述手术机器人系统还包括:智能气体控制模块;所述智能气体控制模块用于:对所述腹腔压力数据进行腹部压力状态分析,得到腹部压力状态分析结果;以及根据所述腹部压力状态分析结果生成腹部气体控制策略;以及根据所述腹部气体控制策略对所述目标手术位置进行智能气体控制。
4.根据权利要求1所述的手术机器人系统,其特征在于,所述智能腔镜控制模块包括:智能腔镜机器人、内窥镜连接件、内窥镜、显示屏以及控制单元;所述智能腔镜机器人与所述内窥镜通过所述内窥镜连接件连接;所述内窥镜固定于所述内窥镜连接件上;所述内窥镜用于:获取所述目标手术位置的腹腔图像数据,并将所述腹腔图像数据传输至所述显示屏;所述显示屏用于:接收所述腹腔图像数据,并对所述腹腔图像数据进行可视化展示。
5.根据权利要求4所述的手术机器人系统,其特征在于,所述控制单元还包括:目标跟踪子单元、模式切换子单元以及运动控制子单元;所述目标跟踪子单元与所述内窥镜连接;所述模式切换子单元与所述操作模块连接;所述运动控制子单元与所述智能腔镜机器人连接。
6.根据权利要求5所述的手术机器人系统,其特征在于,所述目标跟踪子单元具体用于:获取所述内窥镜对应的器械头端标识,并对所述器械头端标识进行检测跟踪,得到标识信息,其中,所述标识信息包括:标识的器械编号、标识的中心点像素坐标以及标识的像素面积信息。
7.根据权利要求5所述的手术机器人系统,其特征在于,所述模式切换子单元具体用于:响应于模式切换信号,对所述智能腔镜机器人进行操作模式切换,得到切换后的目标操作模式,其中,所述目标操作模式包括:自动跟踪模式和手动调节模式;以及根据所述目标操作模式对所述智能腔镜机器人进行操作状态监测,得到操作状态信息。
8.根据权利要求5所述的手术机器人系统,其特征在于,所述运动控制子单元具体用于:接收目标控制指令,并根据所述目标控制指令和预置的运动控制策略控制所述智能腔镜机器人按照预设运动方向进行移动,其中,所述运动控制策略包括:左、右、上、下以及井深。
9.根据权利要求1所述的手术机器人系统,其特征在于,所述操作模块还包括:全角度手术器械;所述全角度手术器械中设置有多个控制按钮;所述全角度手术器械用于:基于所述多个控制按钮获取按钮操作数据,并根据所述按钮操作数据生成腔镜运动信号,其中,所述腔镜运动信号包括:左运动信号、右运动信号、上运动信号、下运动信号以及井深运动信号。
10.根据权利要求7所述的手术机器人系统,其特征在于,所述操作模块具体用于:当所述目标操作模式为手动调节模式时,实时响应所述按钮操作数据并生成腔镜运动信号;以及当所述目标操作模式为自动跟踪模式时,控制所述智能腔镜机器人进行自动运动。
技术总结
本发明涉及智慧医疗领域,公开了一种手术机器人系统,用于实现腔镜手术的自动化并提高腔镜手术过程的智能性。所述手术机器人系统包括:操作模块和智能腔镜控制模块;所述操作模块用于:采集按钮操作数据,并根据所述按钮操作数据生成腔镜运动信号;以及将所述腔镜运动信号发送至所述智能腔镜控制模块;所述智能腔镜控制模块用于:响应于所述腔镜运动信号,并基于预设的目标控制模式对智能腔镜机器人的行进过程进行腔镜运动控制;以及采集目标手术位置的腹腔图像数据,并根据所述腹腔图像数据动态调整所述目标手术位置的手术视野。
技术研发人员:曹彬,康传帅,向长林,沈伟中,朱健
受保护的技术使用者:江苏人冠医疗科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!